Sirius 高频头使用 ELRS MAVLink 模式进行遥测 — iNav固件
概述
ELRS 的 MAVLink 模式通过 ExpressLRS 射频链路实现双向遥测数据传输,让遥控器不仅能发送控制指令,还能实时接收飞行器的状态数据。本文章将指导你完成从固件升级到地面站连接的全过程。
一、MAVLink 模式工作原理
1.1 数据链路架构
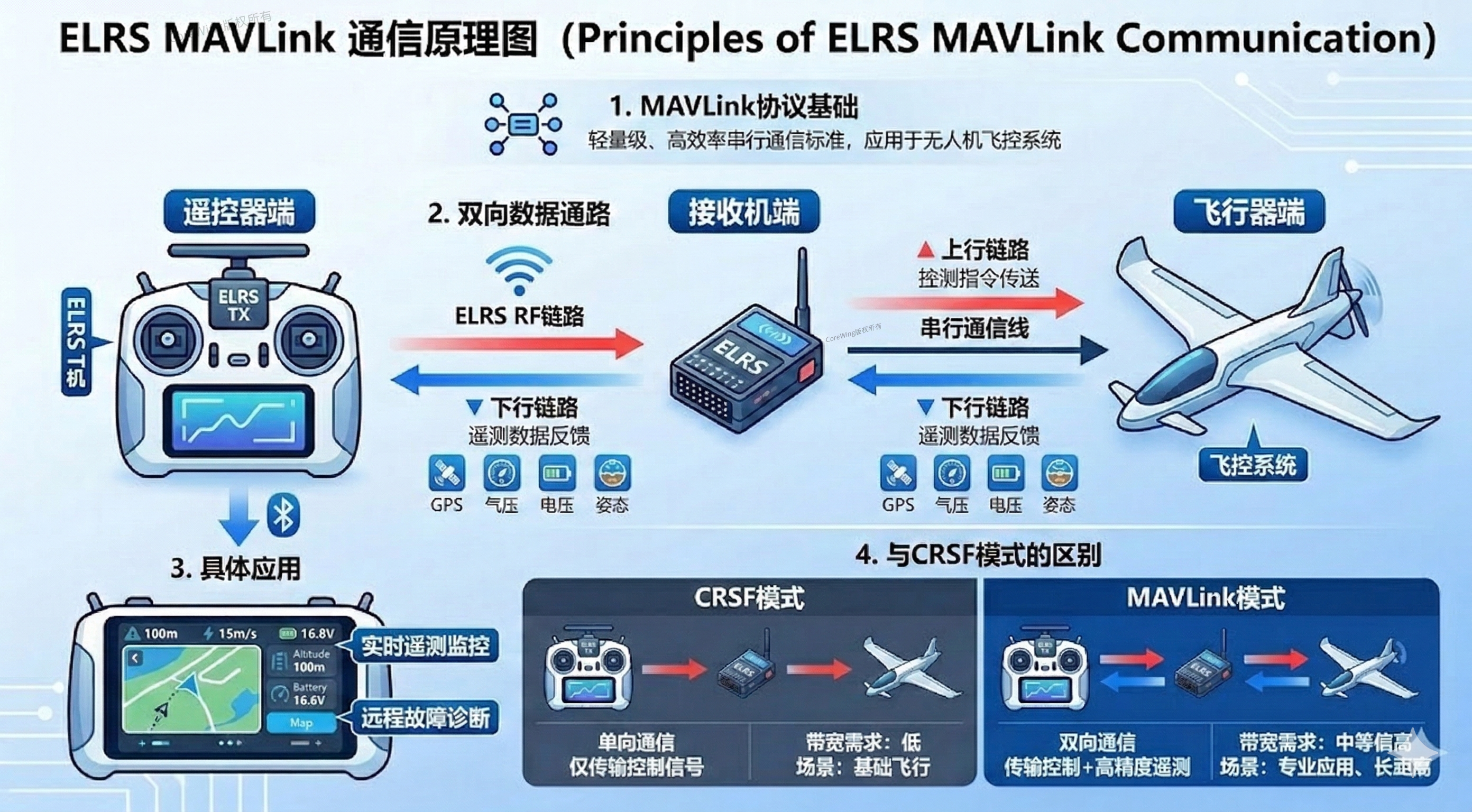
开启 MAVLink 功能后,系统建立起完整的双向通信链路:
下行链路(遥测): 飞行器将 GPS 位置、气压高度、电池电压、姿态角度等数据通过接收机反馈至遥控器。
上行链路(控制): 遥控器的通道指令通过接收机发送至飞行器。
1.2 MAVLink vs CRSF 模式对比
| 特性 | CRSF 模式 | MAVLink 模式 |
|---|---|---|
| 通信方向 | 单向(遥控器→飞行器) | 双向(遥控器↔飞行器) |
| 传输内容 | 控制信号+少量遥测信号 | 控制信号 + 遥测数据 |
| 带宽需求 | 低 | 中等偏高 |
| 典型应用 | 基础飞行控制 | 长距离飞行、任务规划、实时监控 |
1.3 实际应用场景
实时监控:遥控器屏幕显示飞行器位置、高度、电量、速度等关键数据
远程诊断:通过遥测数据分析飞行器状态,快速定位故障
地面站连接:配合 MissionPlanner 等地面站进行任务规划和飞行监控
二、设备清单
2.1 飞控
- CoreWing F405 WING V2
2.2 无线通信模块
高频头:天狼星 Sirius 2.4G ELRS
接收机:SkyGuy Nano 2G4 RX
2.3 遥控器
推荐:RadioMaster TX16S
兼容:其他支持 CRSF 协议的遥控器
三、遥控器基础设置
3.1 启用外置高频头
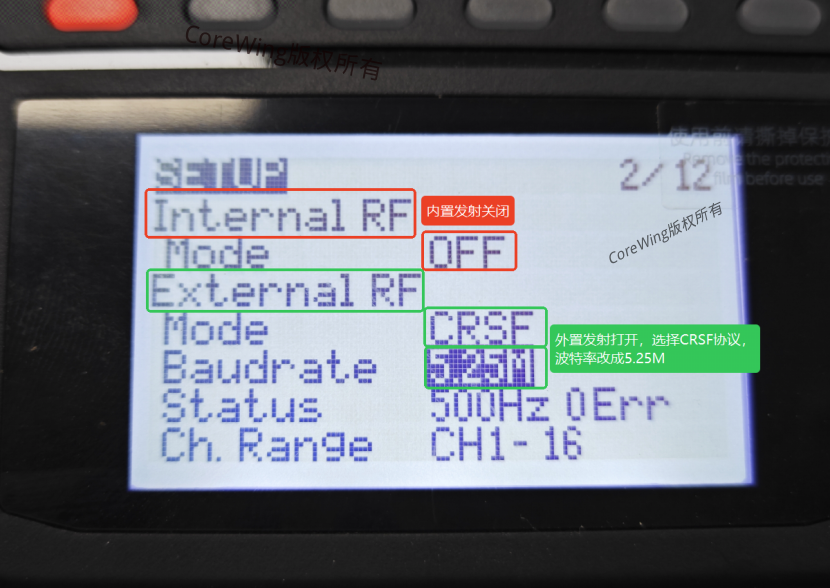
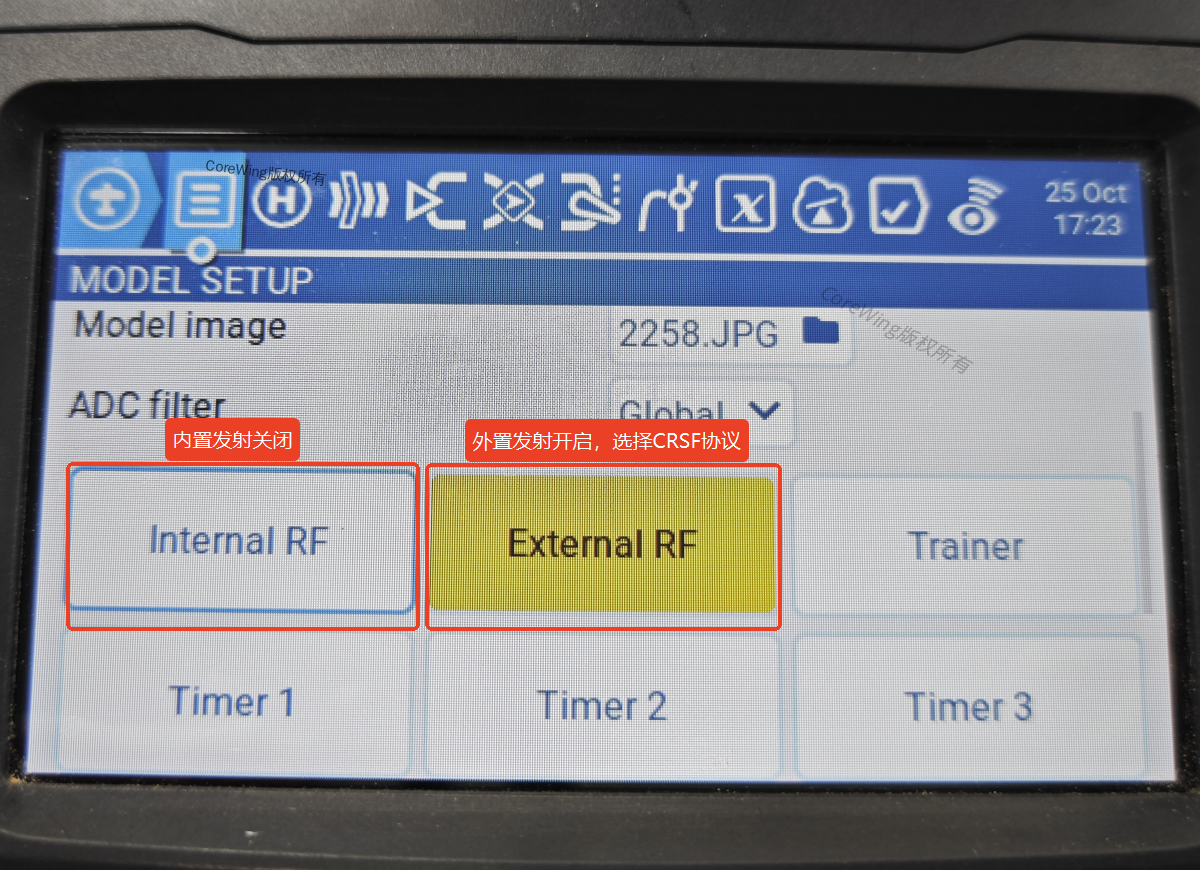
进入模型设置菜单,找到"SETUP"页面
关闭"Internal RF Mode"(内置射频)
开启"External RF Mode"(外置射频)
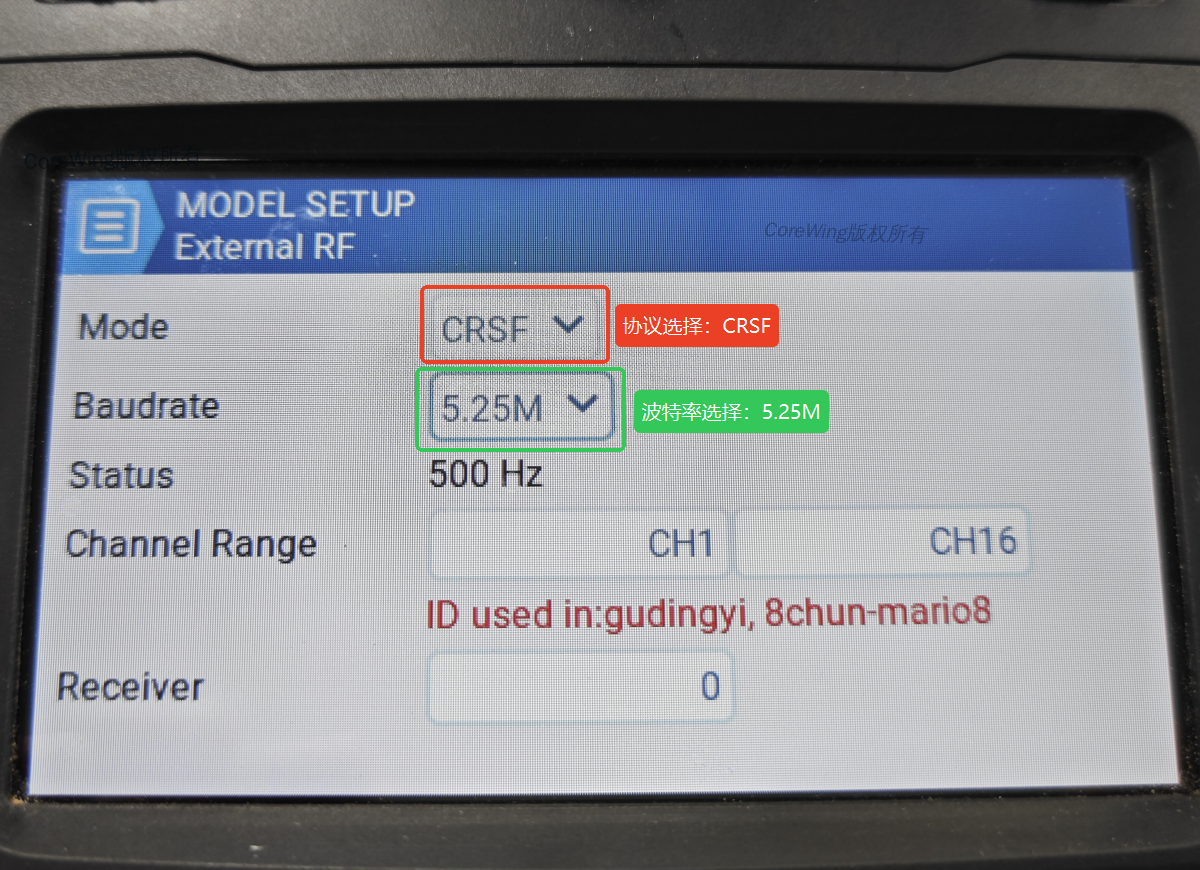
将"Mode"设为
CRSF,"Baudrate"设为5.25M
重要
为什么要设置"Baudrate"设为5.25M?
若设置为 400k,则有可能无法进入到 ExpressLRS 的 Lua 脚本;
若设置为1.87M,则有可能无法将 Packet Rate 设置为 F1000。
3.2 设置参考
黑白屏遥控器:
彩屏遥控器:
3.3 高频头和接收机对频
重要
高频头与接收机对频教程可参考:ELRS 遥控器/高频头如何与接收机对频
四、固件升级
重要提示
使用 MAVLink 模式前,必须将以下固件升级至指定版本:
高频头固件:≥ 3.5.6(出厂固件)
接收机固件:≥ 3.5.6(出厂固件)
Backpack 固件:≥ CW 1.5.4(CoreWing 定制版)
以上固件均可通过 CoreWing APP 进行升级。
如何通过 CoreWing APP 更新 Sirius 高频头和 SkyGuy 接收机的 ELRS 固件可查看该文章:
五、MAVLink 模式参数配置
注意事项
配置高频头参数时,请确保接收机已断电,以免出现配置异常。
5.1 高频头参数设置
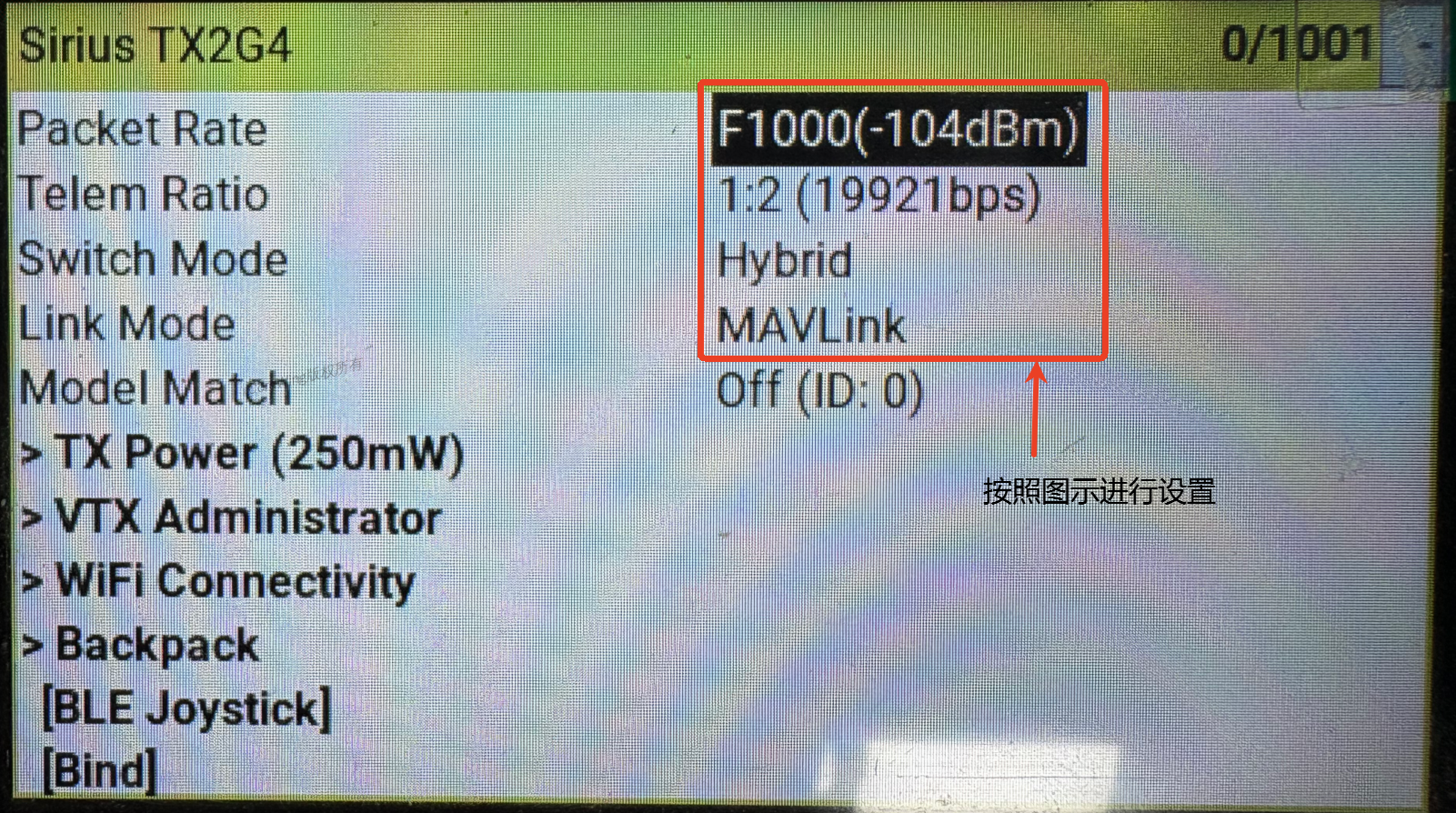
在遥控器 ExpressLRS 脚本页面,按以下表格配置:
| 配置项 | 设置值 | 说明 |
|---|---|---|
| 数据包速率 | F1000 | 频率 1000Hz,灵敏度-104dBm |
| 遥测比例 | 1:2 | 比例模式,速率 19921bps |
| 模式切换 | Hybrid | 混合模式 |
| 链接模式 | MAVLink | 遥测协议 |
5.2 接收机参数设置
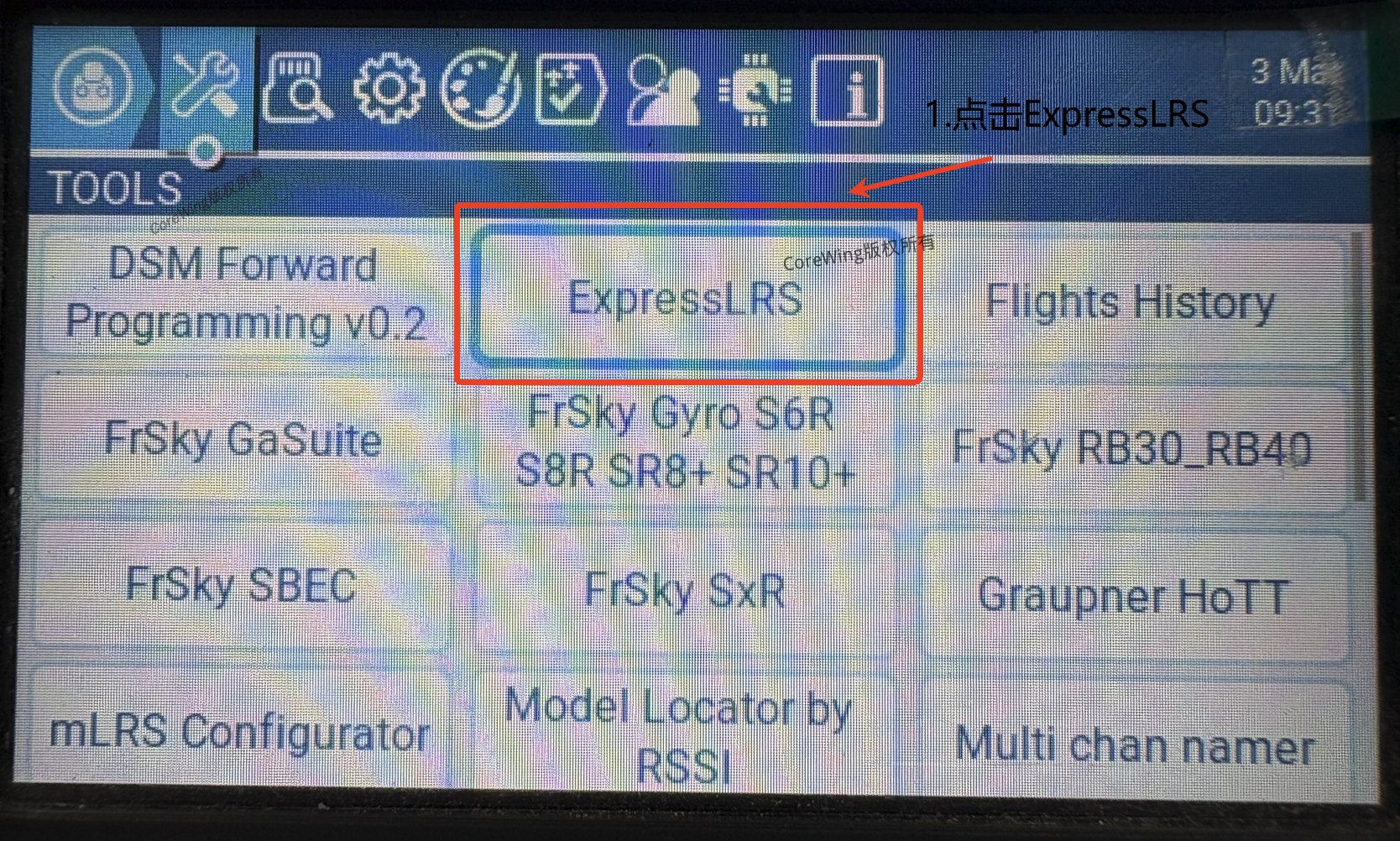
遥控器进入 ExpressLRS 脚本 → 选择Other Devices
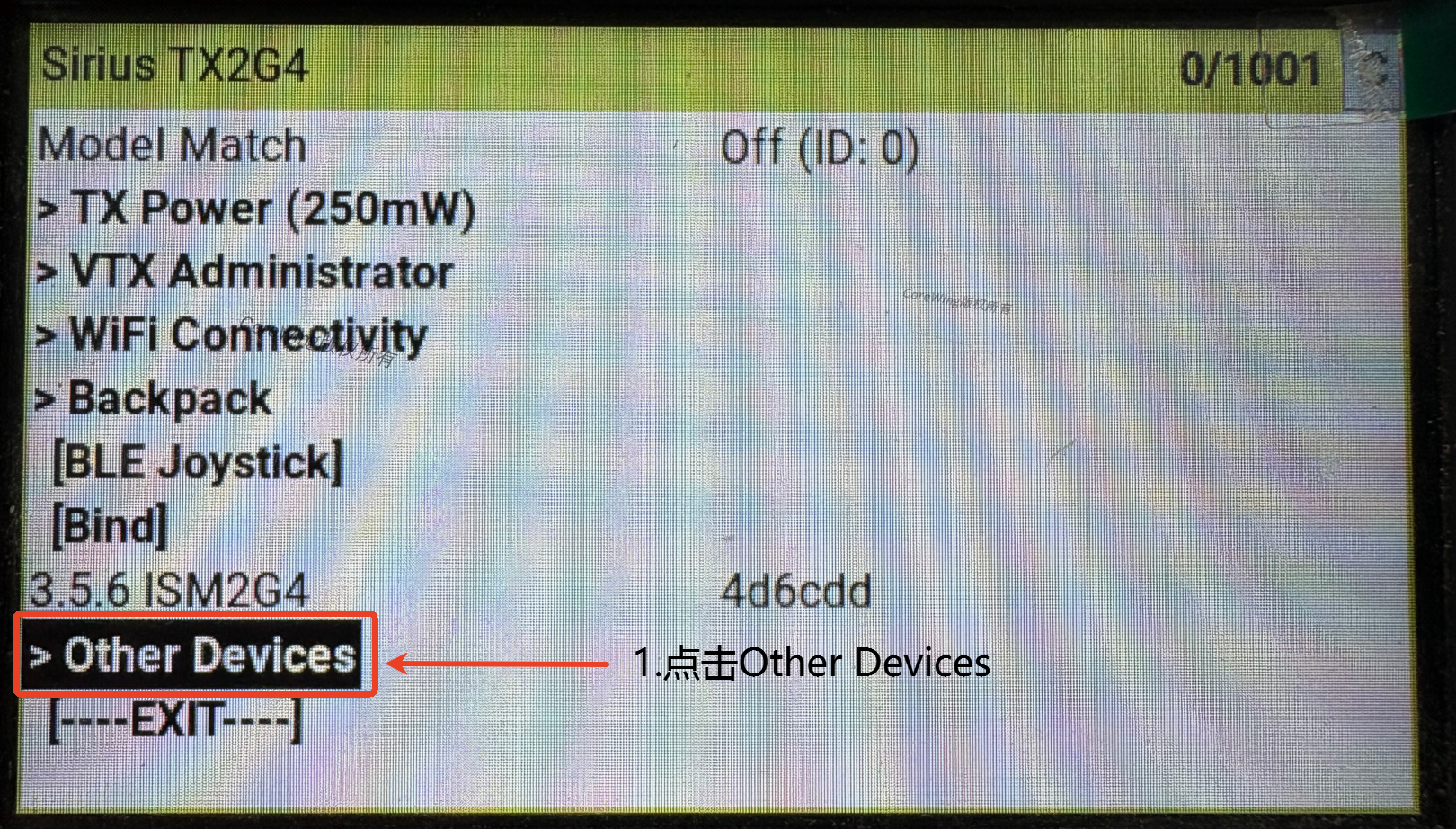
选择SG Nano 2G4 RX接收机
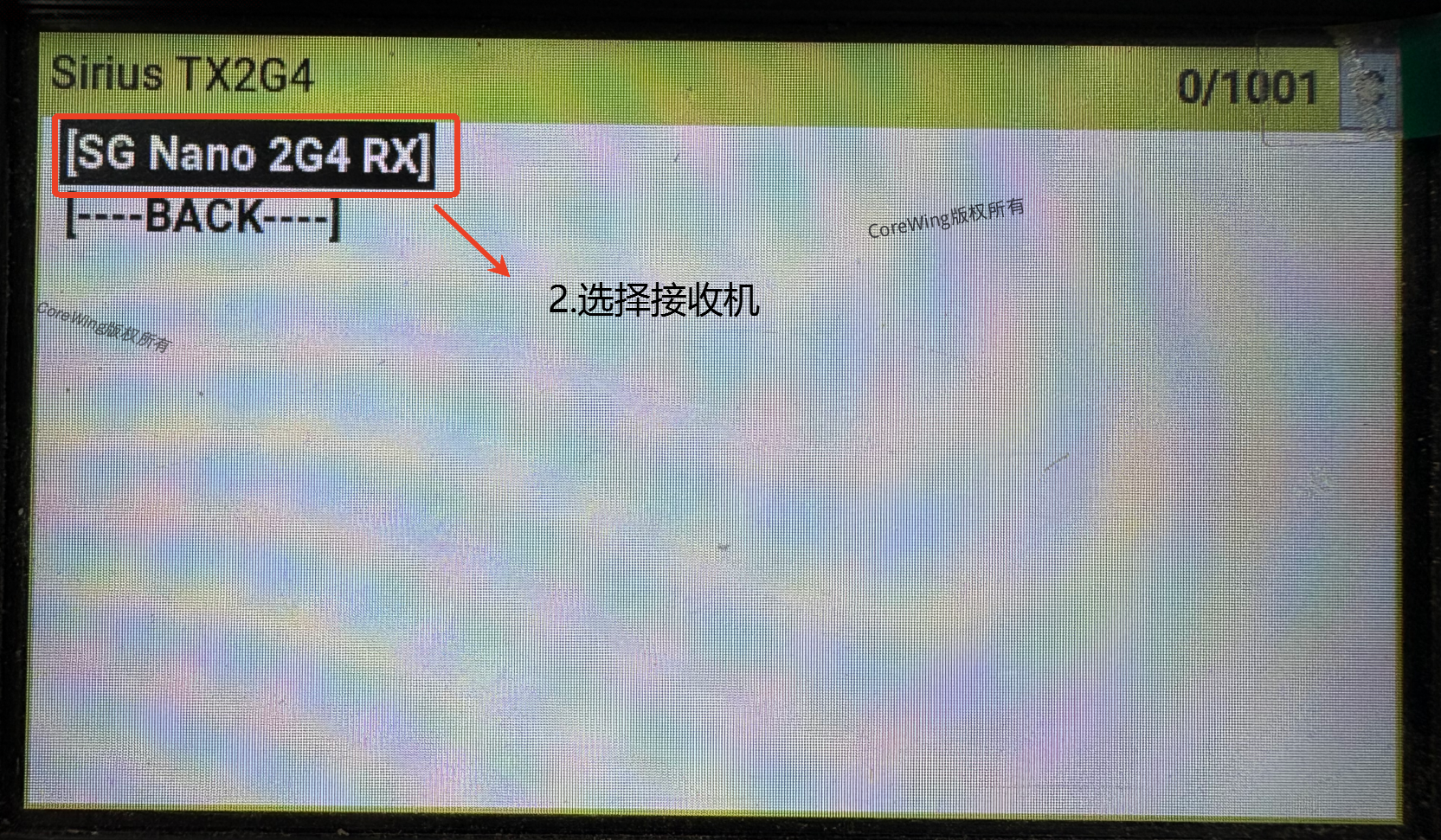
将接收机协议设为
MAVLINK,其他参数保持默认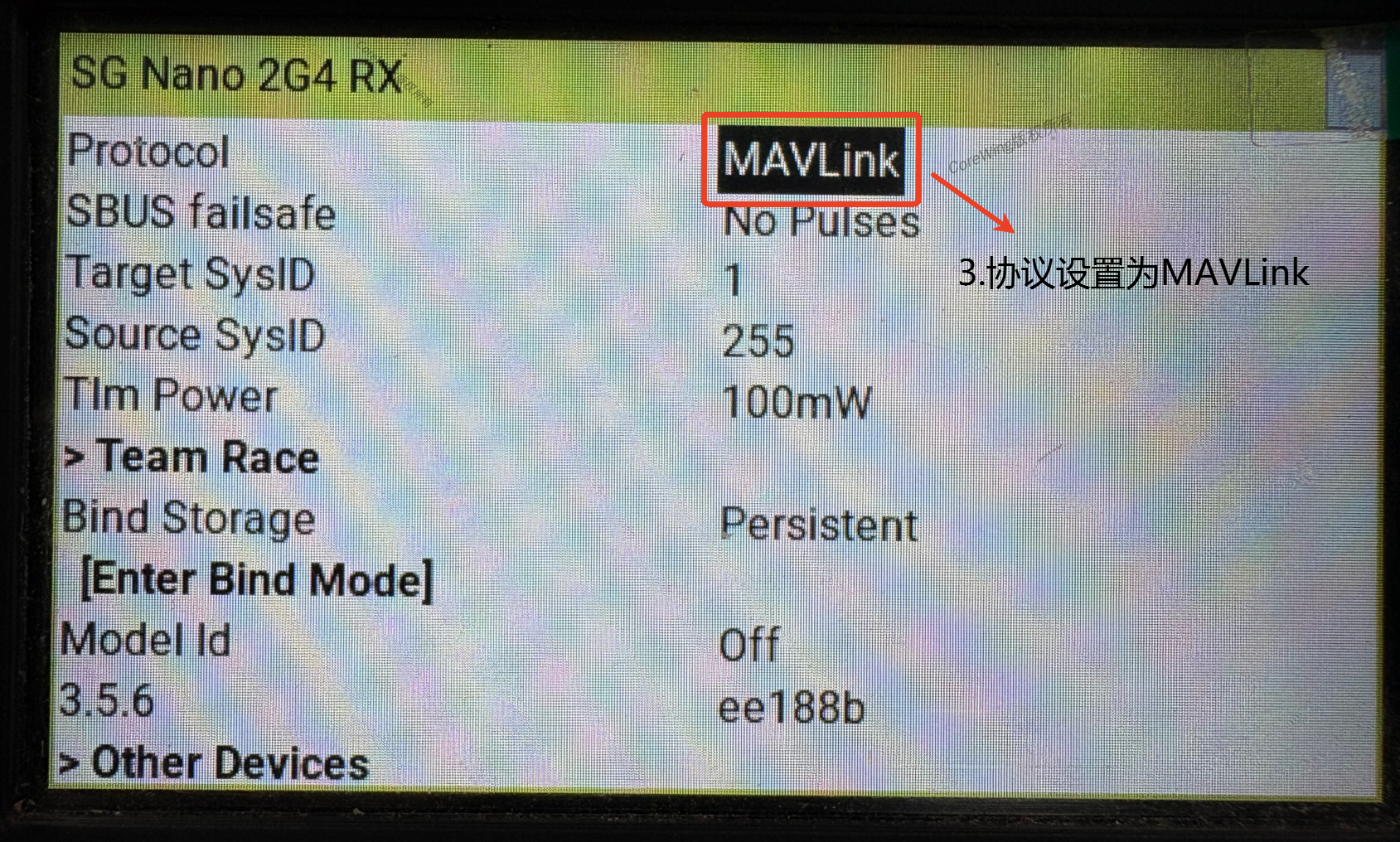
六、飞控配置
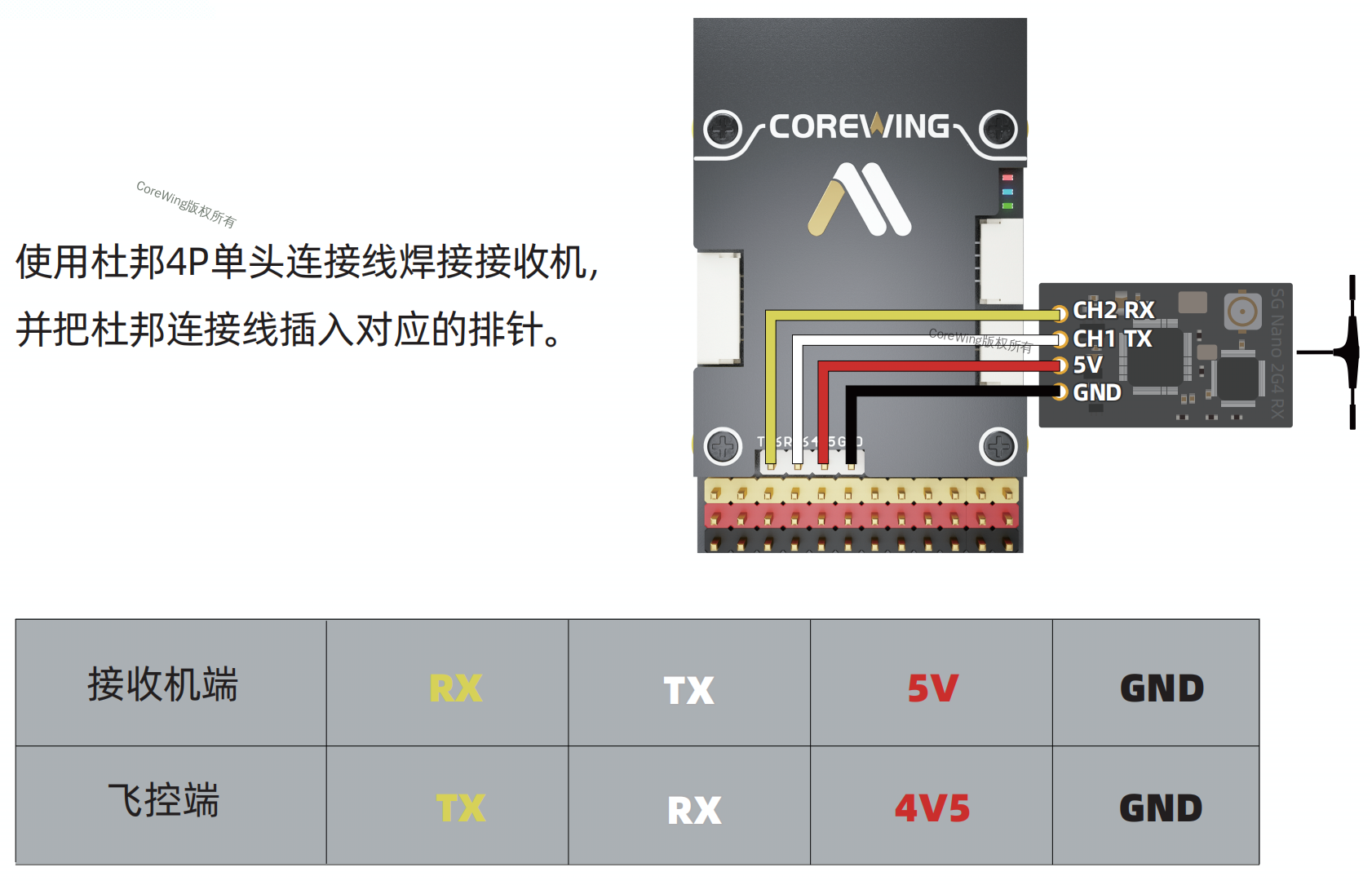
6.1 硬件连接
串口选择说明
CoreWing 飞控接收机接法:
必须连接到串口 6(UART6)
原因:串口 6 内置 DMA 支持,可稳定运行 460800bps 高波特率
⚠️ 注意:其他串口(如串口 4)虽然硬件兼容,但缺少 DMA 支持,MAVLink 通信无法正常工作。
6.2 飞控参数设置
前提:打开 CoreWing APP,连接飞控无线模块,进入参数设置页面

进入端口设置页面
找到串口 6,按以下配置:
遥测输出:MAVLink
波特率:460800
点击保存并重启

步骤 2:配置接收机
进入接收机设置页面
按以下配置:
接收机类型:SERIAL
串行接收机协议:MAVLINK
串口反相:OFF
串口接收机半双工模式:AUTO
点击保存并重启

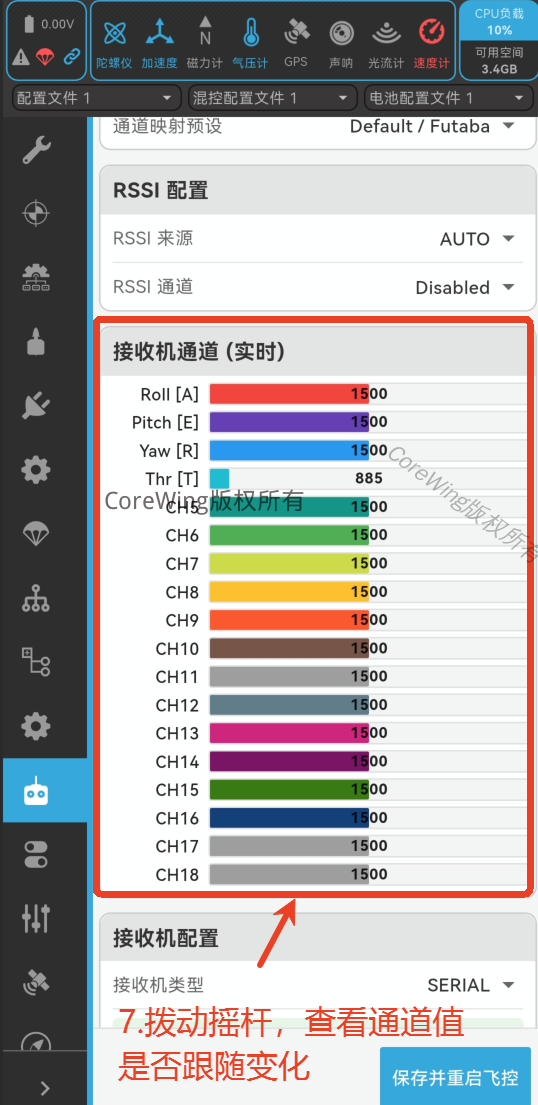
步骤 3:验证连接
重启飞控后,进入**接收机通道(实时)**页面,拨动摇杆检查通道值是否实时变化。
若无变化,请检查第五章的 MAVLink 模式参数设置。
七、地面站连接
7.1 MissionPlanner 地面站连接
步骤 1:配置 Backpack WiFi
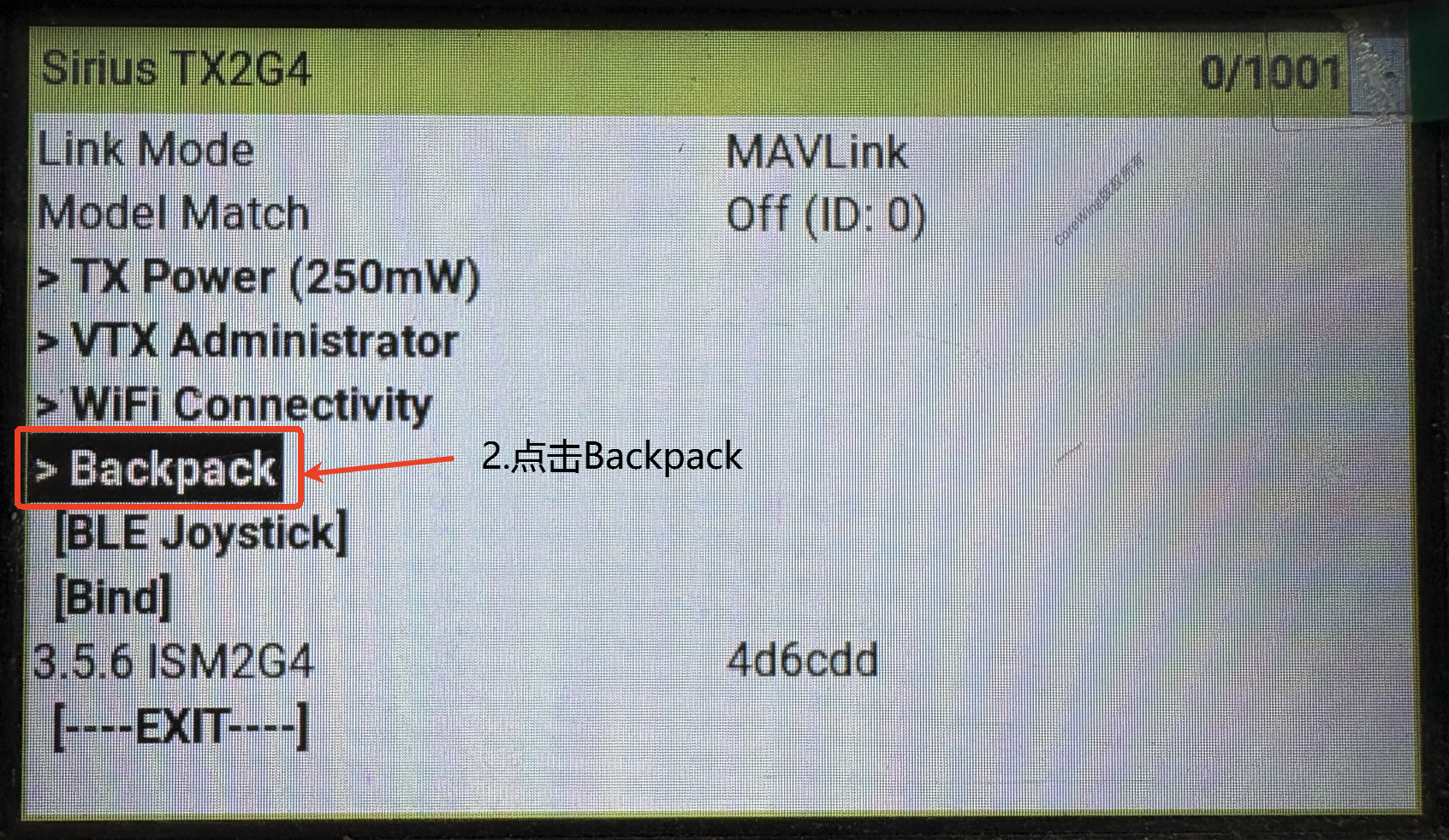
- 遥控器进入 ExpressLRS 脚本 → 点击Backpack设置
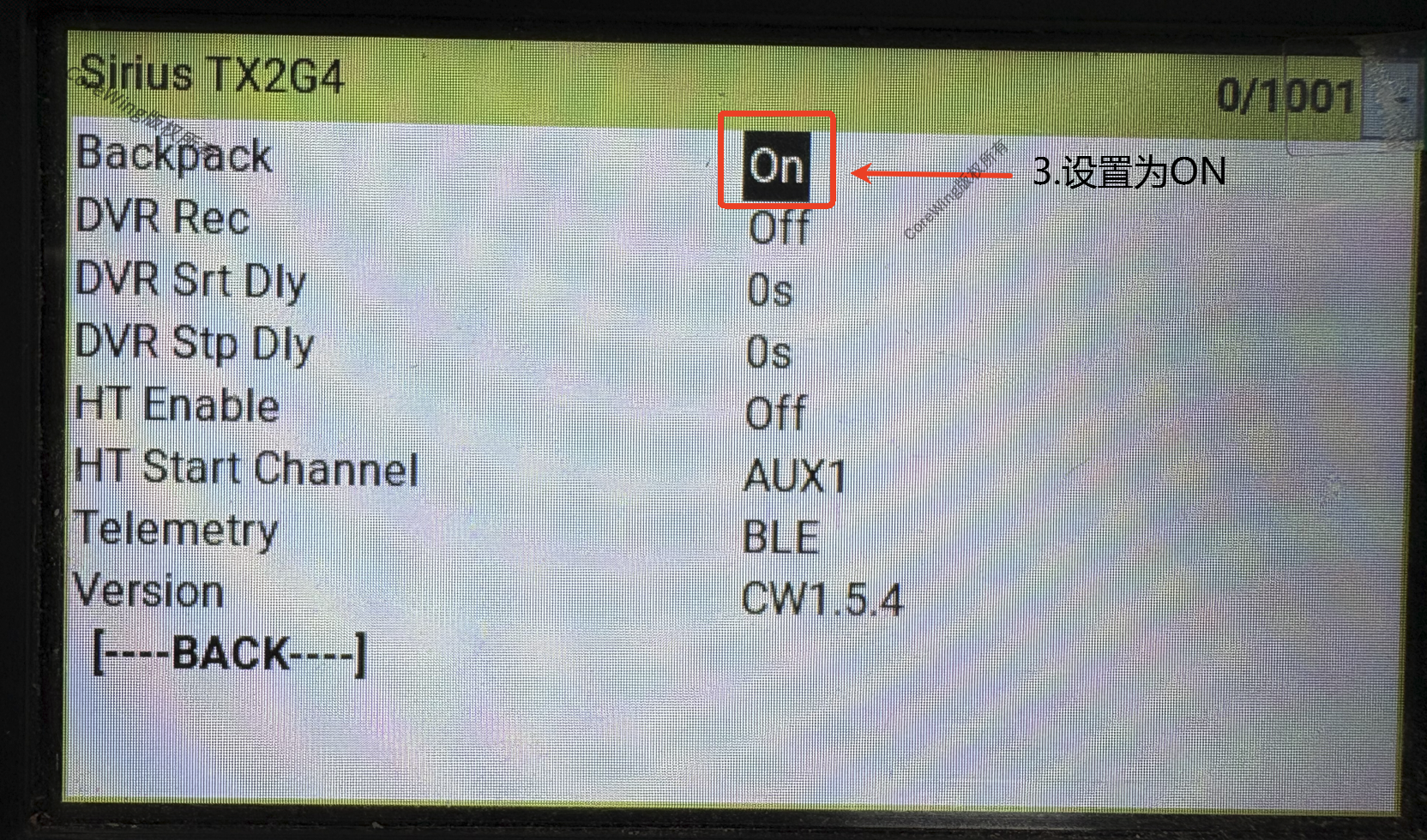
- 将Backpack设为On
- 将Telemetry设为WiFi
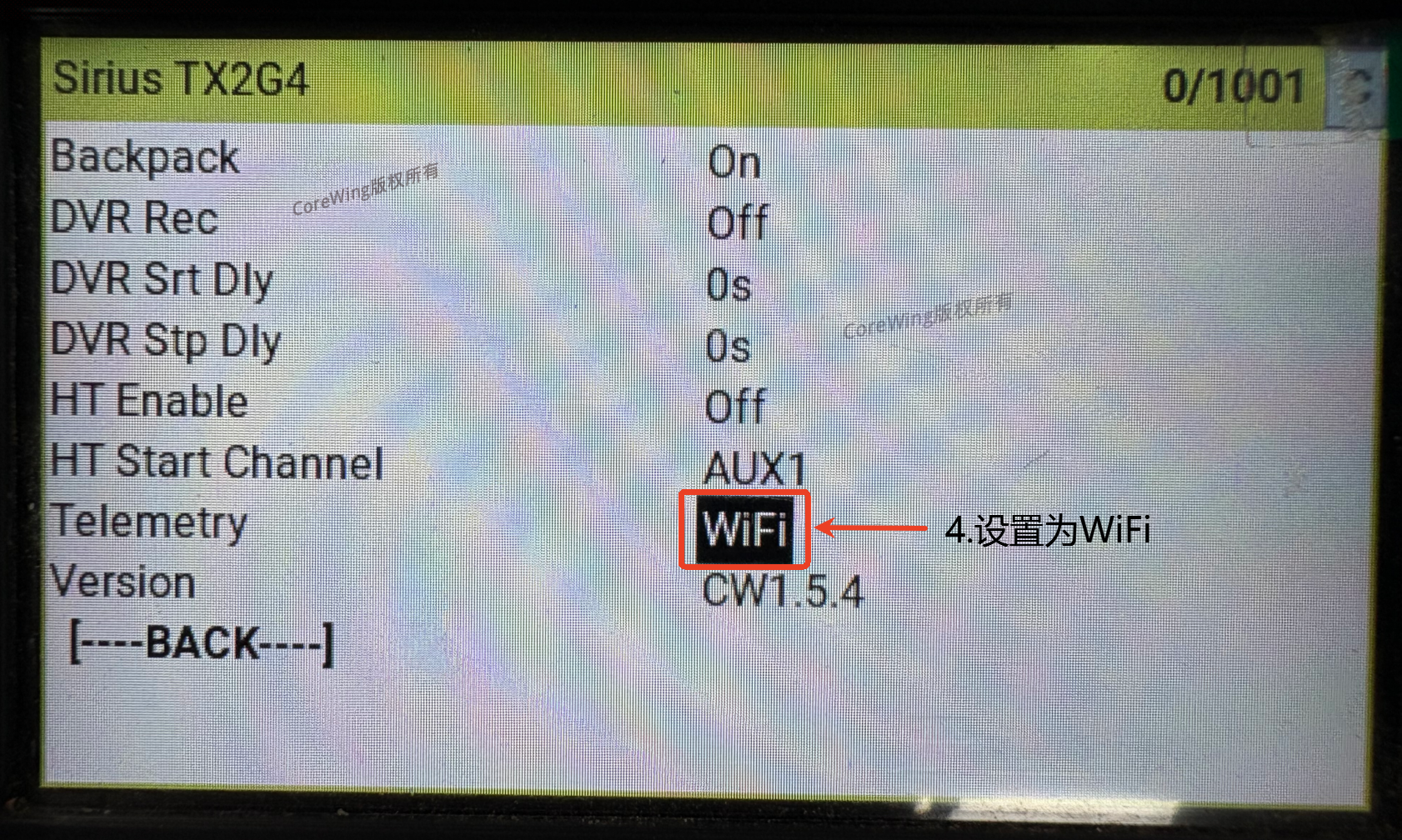
- 重启遥控器使设置生效
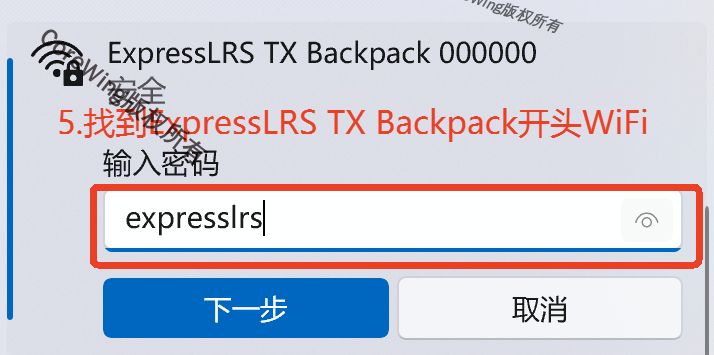
步骤 2:电脑 WiFi 连接
找到ExpressLRS TX Backpack 000000的 WiFi 并连接(密码:expresslrs)
步骤 3:MissionPlanner 连接配置
打开 MissionPlanner
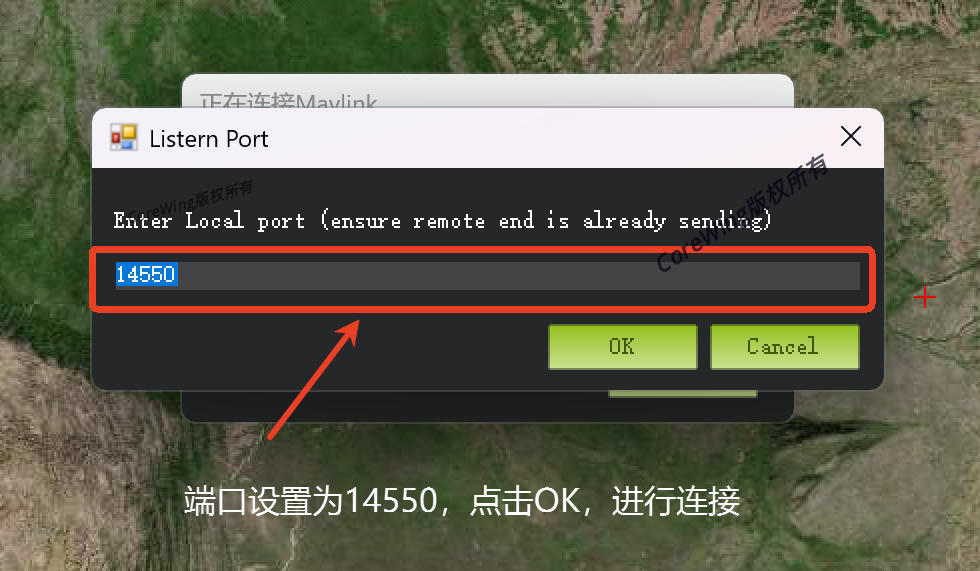
选择UDP 连接模式
波特率设为
115200端口设为
14550点击连接

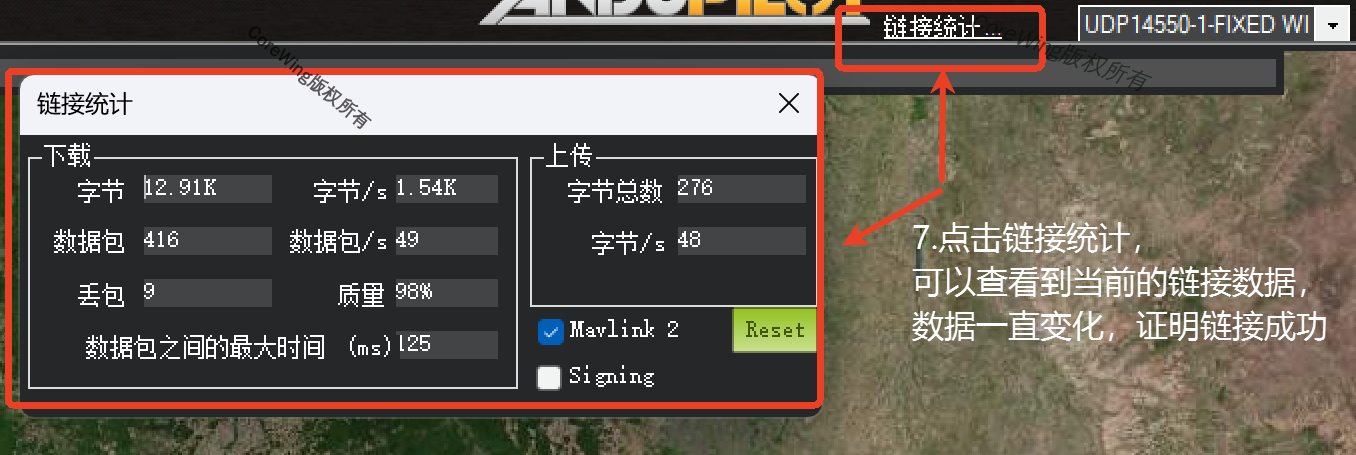
步骤 4:验证连接
连接成功后,点击连接统计可查看 MAVLink 遥测链路状态: