如何解决舵面行程不足问题
一、现象
飞机舵面行程不足会导致 转向幅度不够、 转弯半径过大、姿态变化很小、 响应迟缓 等问题,也会无法完成大坡度转弯、翻滚、筋斗等需要大舵量的动作。
二、原因分析
1.在地面站设置的舵机行程范围过小, 导致在手动模式舵量太小。
2.ArduPilot 固件默认限制姿态目标角度
ROLL_LIMT_DEG(最大横滚角)、 PTCH_LIM_MAX_DEG(最大俯仰角)限制了在 FBWA、AUTO 等模式下的舵量 即使摇杆打满,飞控也不会输出完整的舵量。
- 自稳模式以及由飞控参与的飞行模式的舵量
- 手动模式下的舵量
三、解决办法
3.1 使用 CoreWingAPP 设置
3.1.1 修改手动模式下的舵面行程(如 ACRO、Manual 等飞行模式)
重要
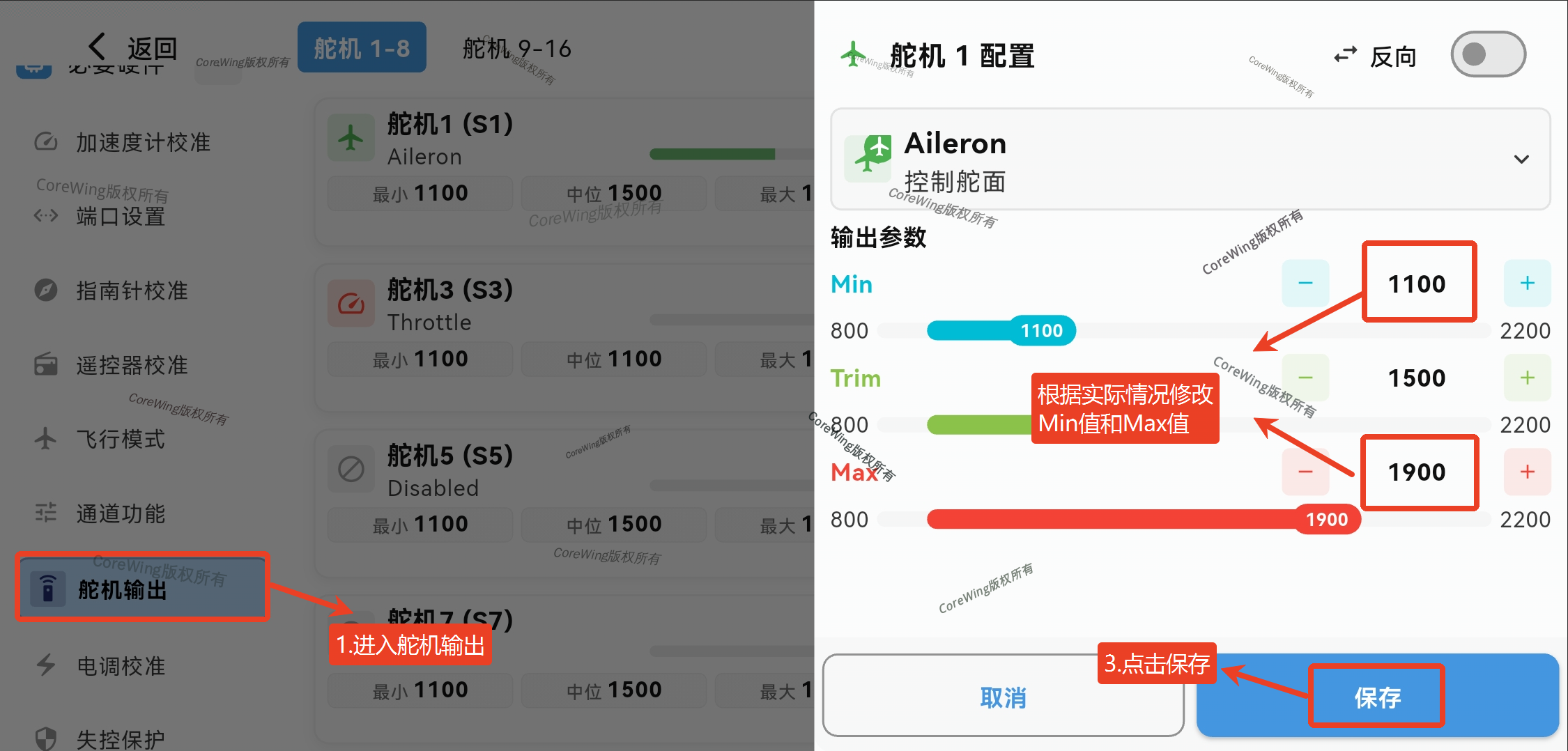
Min 值和 Max 值修改幅度要保持一致。例如:Min 值减小了 100,则 Max 值就要增加 100;同理,Min 值增加了 100,则 Max 值就要减小 100。
重要
想要将舵量修改更大,可以将 Min 值减小,Max 值增加;Min 值最小 800,Max 值最大 2200。
- 飞控连接上 CoreWingAPP,进入舵机输出页面
- 修改对应舵机通道的舵机行程(Min 值和 Max 值),点击保存
3.1.2 修改自稳模式以及由飞控参与的飞行模式下的舵面行程(如 FBWA、AUTO 等飞行模式)
- 飞控连接上 CoreWingAPP,进入基本调参页面
- 选择油门/空速,修改 PTCH_LIM_MAX_DEG、ROLL_LIMT_DEG
- 点击保存

重要
如果调整 PTCH_LIM_MAX_DEG、ROLL_LIMT_DEG 没有变化,要去CoreWingAPP 的舵机输出页面修改Min 值和 Max 值。
舵机的行程不足,会 限制 PTCH_LIM_MAX_DEG、ROLL_LIMT_DEG 修改的效果。
重要
修改完成之后可以通过切换对应的模式,然后拨动遥控器的摇杆,确认舵量是否发生改变。
3.2 使用 MP 地面站设置
3.2.1 修改手动模式下的舵面行程(如 ACRO、Manual 等飞行模式)
重要
Min 值和 Max 值修改幅度要保持一致。例如:Min 值减小了 100,则 Max 值就要增加 100;同理,Min 值增加了 100,则 Max 值就要减小 100。
重要
想要将舵量修改更大,可以将 Min 值减小,Max 值增加,Min 值最小 800,Max 值最大 2200。
- 飞控连接上地面站
- 点击进入 Servo Output
- 修改对应舵机通道的舵机行程(Min 值和 Max 值)

3.2.2 修改自稳模式以及由飞控参与的飞行模式下的舵面行程(如 FBWA、AUTO 等飞行模式)
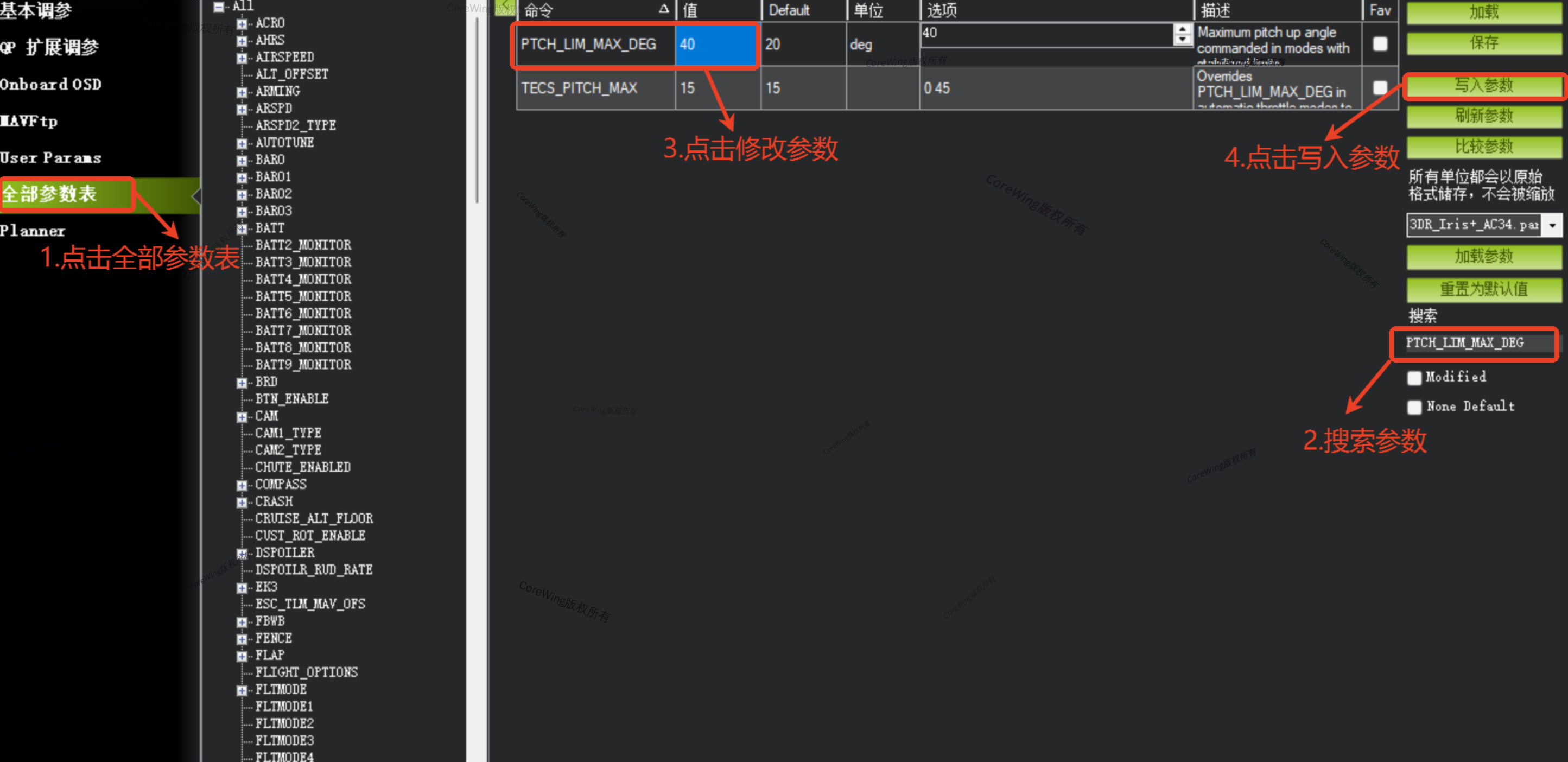
- 点击进入全部参数表
- 搜索参数 PTCH_LIM_MAX_DEG、ROLL_LIMT_DEG 修改数值
- PTCH_LIM_MAX_DEG:最大俯仰角度值,可以修改 尾翼 的舵量大小。
- ROLL_LIMT_DEG:横滚角度值,可以修改 副翼 的舵量大小。
- 点击写入参数
重要
如果调整 PTCH_LIM_MAX_DEG、ROLL_LIMT_DEG 没有变化,要去地面站 Servo Output 页面修改Min 值和 Max 值。
舵机的行程不足,会 限制 PTCH_LIM_MAX_DEG、ROLL_LIMT_DEG 修改的效果。
四、结果验证
- 切换飞行模式,观察飞机的姿态,确认飞机舵量是否符合需求
- 修改前,摇杆打满了但舵量较小
- 修改后,摇杆打满了舵量增大

2.若调整后仍未改善,可继续在地面站修改舵机行程以及 PTCH_LIM_MAX_DEG、ROLL_LIMT_DEG 的值。
技术支持二维码
