CoreWing APP的AP专家调参介绍
CoreWing APP的AP专家调参介绍
一、简介
CoreWing 团队全新推出 CoreWing APP。无论你使用 INAV 还是 ArduPilot,皆可在这款应用中实现专业级调参。摆脱电脑束缚,手机直连飞控,实时查看并修改参数,调试过程高效流畅。界面简洁直观,操作轻松上手,搭配一键设置与固件升级功能,即便是初次接触调参的新手,也能快速完成飞机调试。更多强大功能,等你来探索。
1.1主要功能
• 参数设置:支持 Mavlink / MSP 协议,提供完整的参数配置界面,还原原生地面站操作体验。支持参数实时读写与一键设置,调参更省心。
• 遥测查看:实时显示电压、电流、电池容量、高度、飞行距离、GPS、航向、飞机位置等关键飞行数据,助你随时掌握飞行状态。
• 航点规划:专为 ArduPilot 固件设计,支持多种航点类型,一键上传飞行任务,自主飞行由你掌控。
• 地图导航:支持矢量/卫星地图切换,实时显示飞行轨迹,并提供地图自动跟随模式,定位更直观。
• 飞行记录:录制飞行数据,支持飞行轨迹回放,每一次飞行皆有迹可循。
• 固件更新:支持 ArduPilot 和 INAV 固件一键烧写,无需安装驱动,升级更轻松。
• 模块更新:支持 CoreWing 无线模块一键升级,持续优化,越用越顺手。
• 参数存储:支持 ArduPilot 和 INAV 参数云端保存与共享,方便随时调用,与飞友一起乐享飞行。
• ELRS 固件更新:支持 ELRS 高频头与接收机固件烧写,升级简单省心,飞行更稳定。
• 找机工具:意外炸机不用慌,输入坐标即可快速定位飞机位置,轻松找回设备。
1.2连接方式
支持 CoreWing 飞控通过 BLE连接
适配搭载 CoreWing INAV / ArduPilot 固件的飞控
二、功能使用介绍
2.1 状态速览
- 顶部栏
设备名称(左边):当前连接的飞控型号。
固件信息(蓝色小字):ArduPlane 版本。
重启飞控(橙色方框):向飞控发送重启指令。
模式与解锁状态(绿色方框):当前飞行模式与是否已解锁。

- HUD窗口(左侧)
姿态仪:上方为飞机航向刻度,中部弧形显示为横滚角,中部横线显示为俯仰角;左上方的百分比表示遥控信号强度,左侧框显示地速,右侧框显示高度,底部显示飞机解锁状态、空速以及爬升率。
GPS 状态条:显示当前GPS的状态以及搜星数量。
NO GPS(0)说明:飞控没有识别到GPS,需要检查飞控是否正常连接GPS以及GPS是否正常工作。
NO FIX(0)说明:GPS未定位以及未搜到星,需要将飞机移至开阔、无遮挡的户外环境,等待 GPS 捕获足够卫星后即可定位。
3D(X)说明:GPS已定位,括号内的X显示GPS的搜星数量。
校准水平(绿色按钮):建议在飞机调参完成之后,将飞机放置水平,点击完成飞机水平校准。

- 飞控数据(右侧九宫格)
电池电压、电流:电池电压表示当前供电电压,电流显示实时放电大小。
估算容量:由飞控读取电流传感器的数据,反映电池剩余电量百分比。
遥控信号强度:显示RSSI信号强度(0–100)。
高度:相对飞机第一次初始化位置的高度。
解锁状态:飞机已上锁/已解锁。
姿态角:横滚角、俯仰角、航向角。
经纬度与卫星计数:显示GPS定位的经纬度和搜星的数量。

- 飞控消息(右下列表)
硬件健康:显示飞控硬件和外部设备状态。绿色表示该硬件和设备工作状态正常,红色表示工作状态不正常
飞控消息:实时更新飞控数据,最新解锁前检查项报错消息会在最上方。
飞控关键消息:需要处理的报错消息,必须立即处理,否则会导致飞机无法起飞。
飞控错误消息:表示次要功能模块或辅助系统出了问题,但主系统仍可正常工作
飞控警告消息:表示如果不及时处理,未来飞行调试过程可能会发生错误
飞控调试消息:用于调试的辅助信息,在正常运行时不会出现。
飞控信息消息:正常运行信息,用于日志记录,无需采取任何行动

2.2 必要硬件
2.2.1 加速度计校准
校准加速度计:点击开始校准,根据提示和示意图按照不同方向依次摆放设备,点击完成即可校准成功。

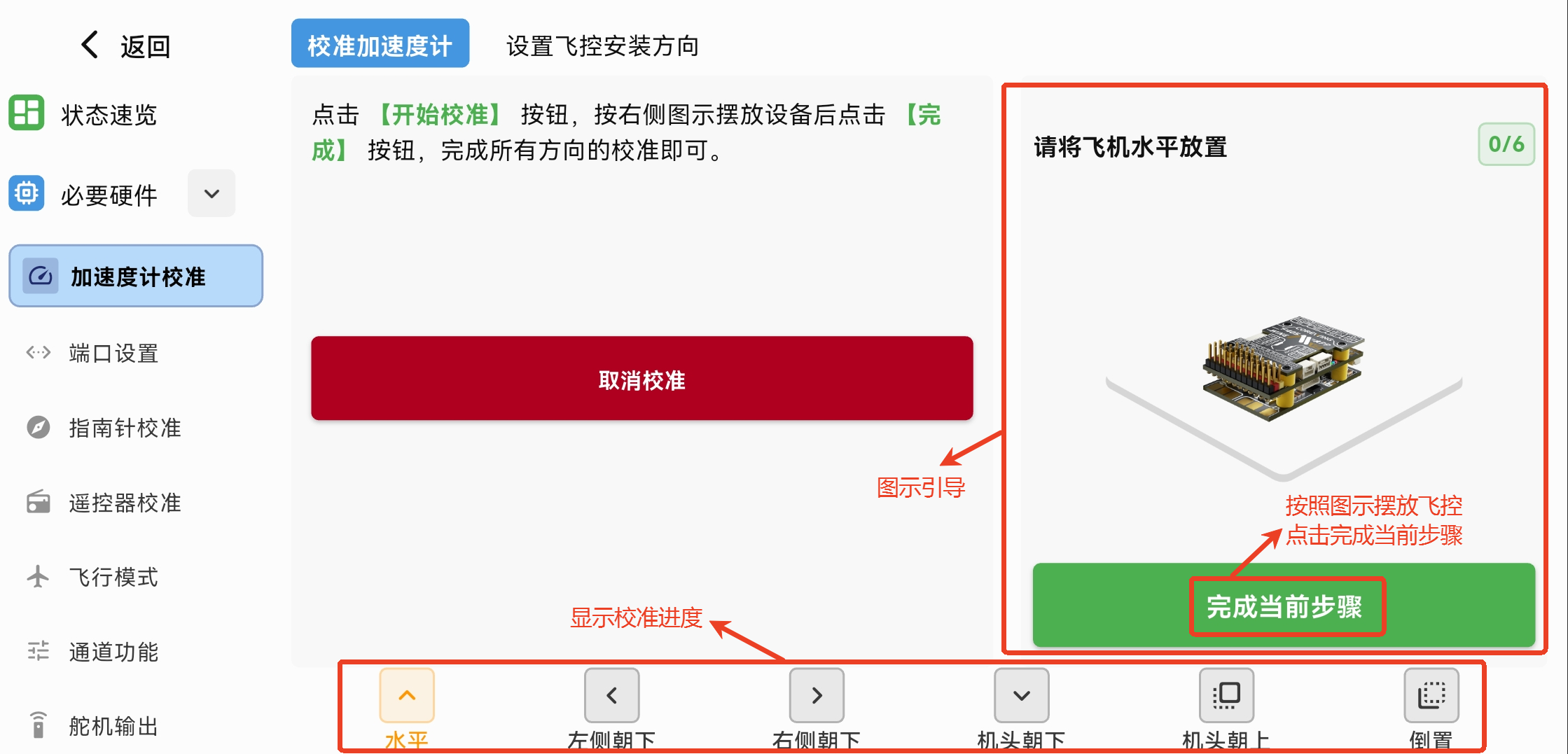
设置飞控安装方向:根据飞控安装摆放的实际情况,点击选择安装方向。左侧图示可以帮助用户更好找到需要安装的方向。

2.2.2 端口设置
配置串口通信参数和协议设置
协议:分为常用协议和其他协议
波特率:系统已为各端口的常用协议配置默认波特率,同时支持用户根据实际需求自定义调整
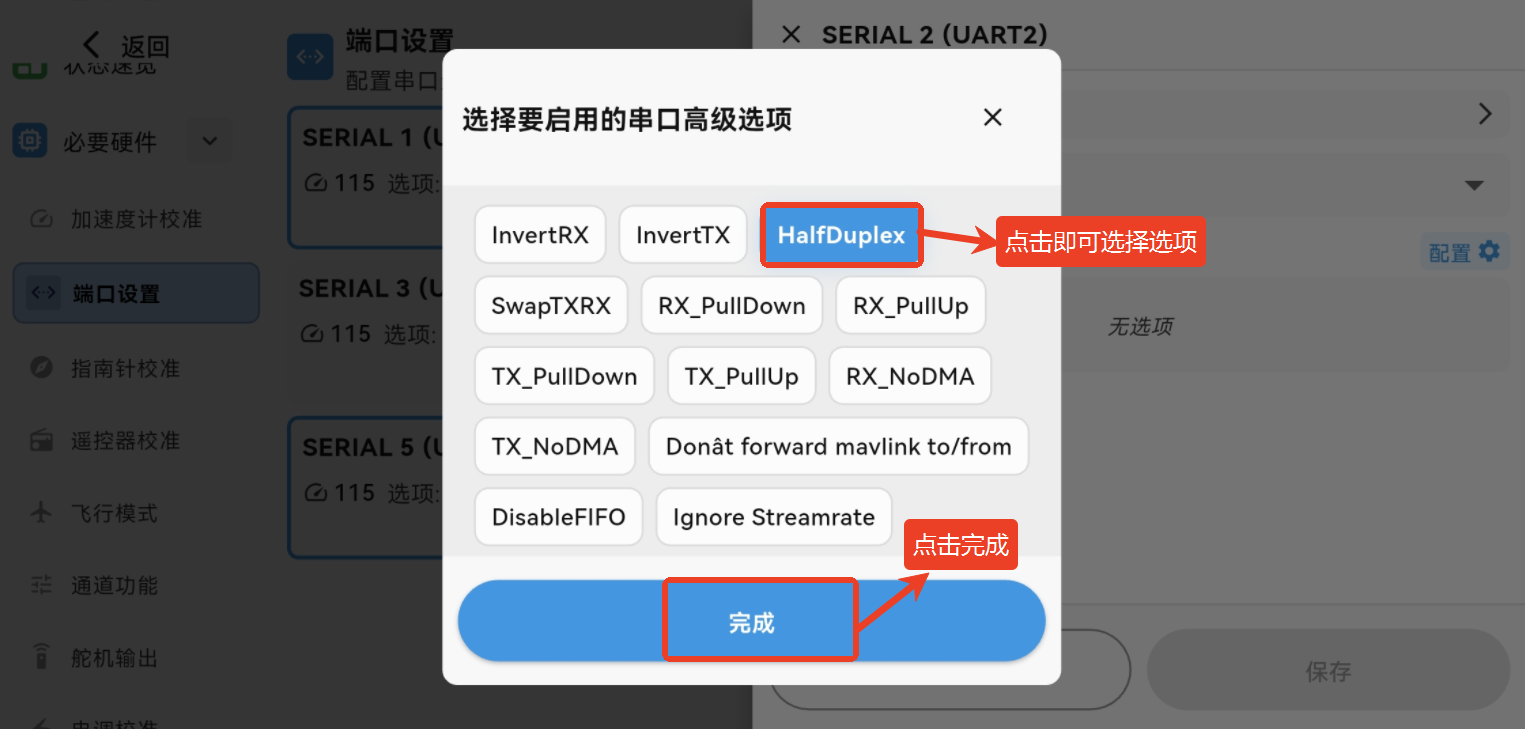
选项:选择要启用的串口高级选项

点击配置,显示要启用的串口高级选项如下图所示:
2.2.3 指南针校准
校准指南针传感器以获得准确的方向数据
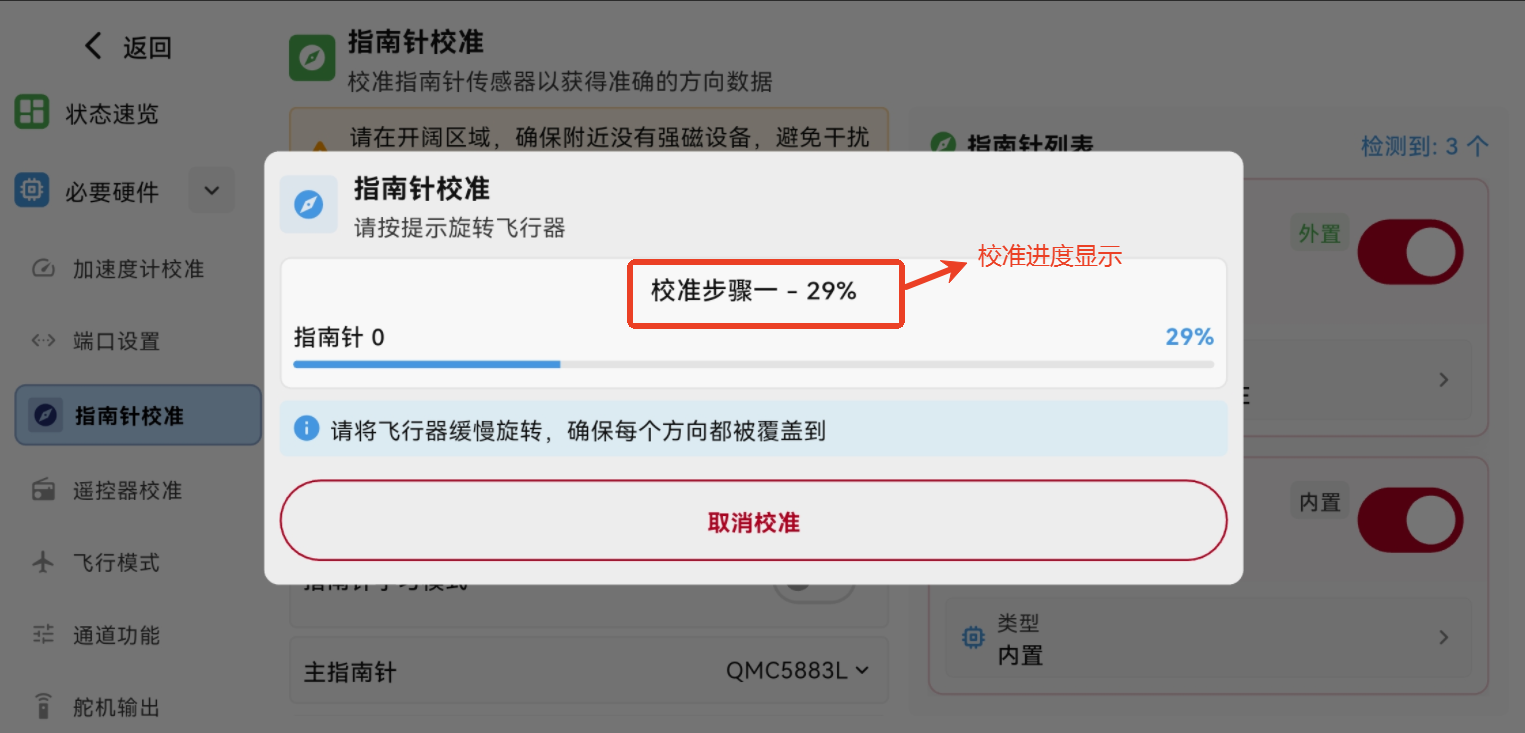
开始校准:点击后进入指南针校准流程,用户根据提示按不同姿态旋转飞行器
在点击“开始校准”之前,请确认已检测到指南针。如果未检测到,请检查GPS模块是否正常工作,并确保接线无误。如外设均无问题,请退出APP,重新上电连接飞控后,重新获取全部参数,再次进入指南针校准页面。

正在进行指南针校准
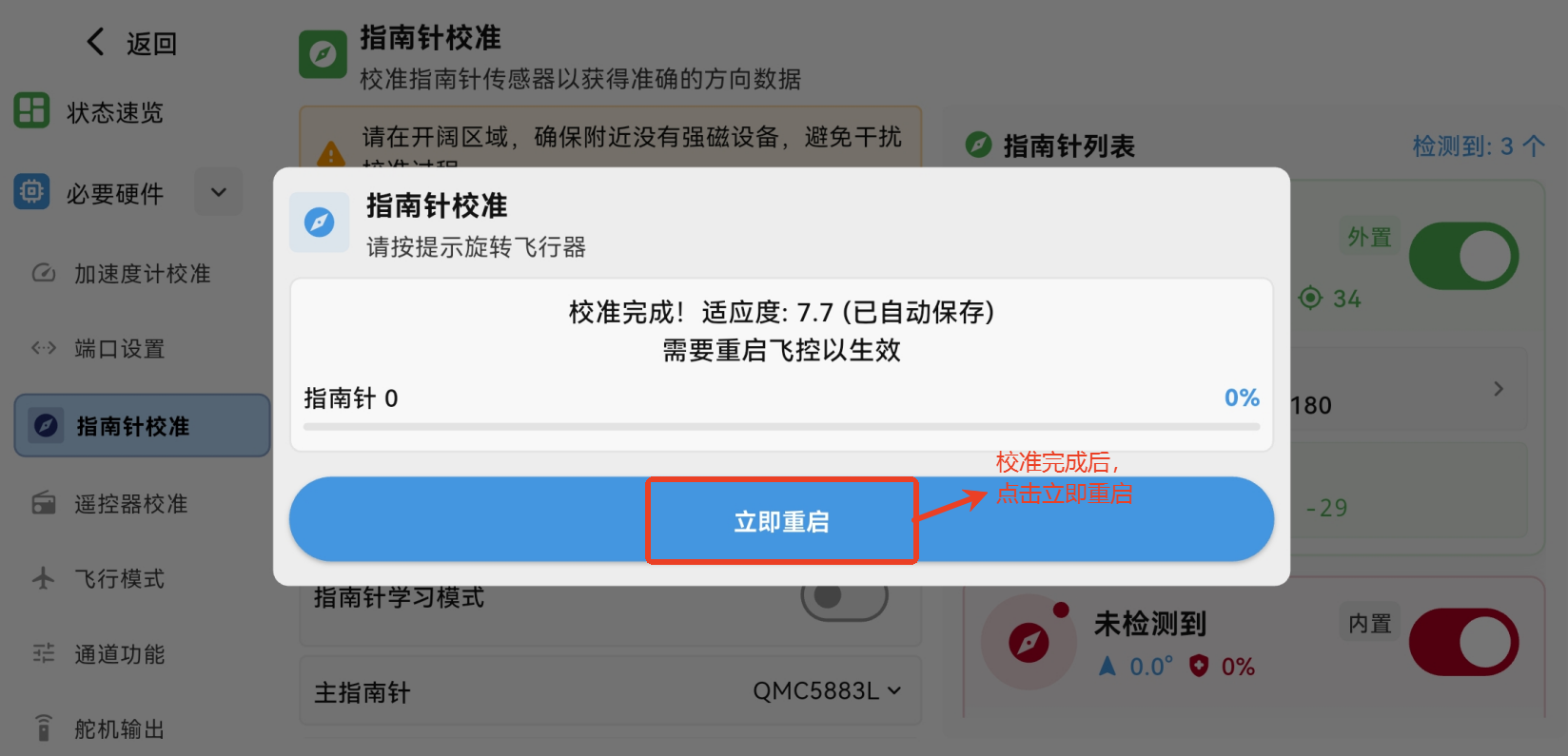
校准完成,点击立即重启
1.磁偏角设置
- 自动磁偏角:开启后,系统会根据飞行位置自动计算磁偏角
2.指南针配置
指南针学习模式:让飞控在飞行过程中自动校正并保存指南针的偏移量
主指南针选择:当存在多个磁力计时(内置与外置),可手动指定主设备。通常优先选择外置磁力计
校准适应度:设置校准数据的容差阈值。数值越小,要求越严格,校准时间也可能更长。
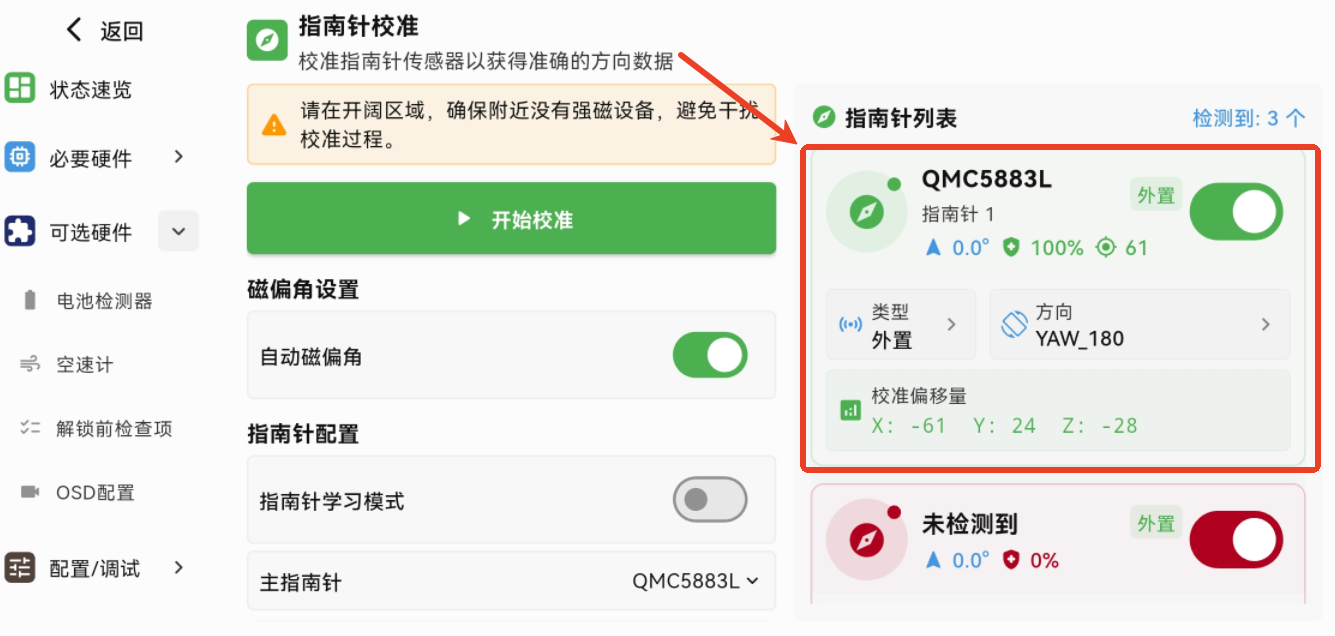
3.指南针校准列表
右侧显示系统检测到的所有指南针模块,支持同时使用3个指南针
未校准:红色显示栏表示尚未进行指南针校准,没有数据。

已校准:绿色显示栏表示校准完成,系统已保存相关数据。
方位角:由GPS位置变化计算出的飞行器在地面上的运动方向角
GPS健康状态:表示GPS与飞控连接质量
最大偏移量:表示X/Y/Z 三轴偏移量中最大的数值
类型:内置或外置模块。
方向:校准完成后,自动识别指南针安装方向
校准偏移量:X/Y/Z 三轴的校准结果,用于补偿磁场偏差。
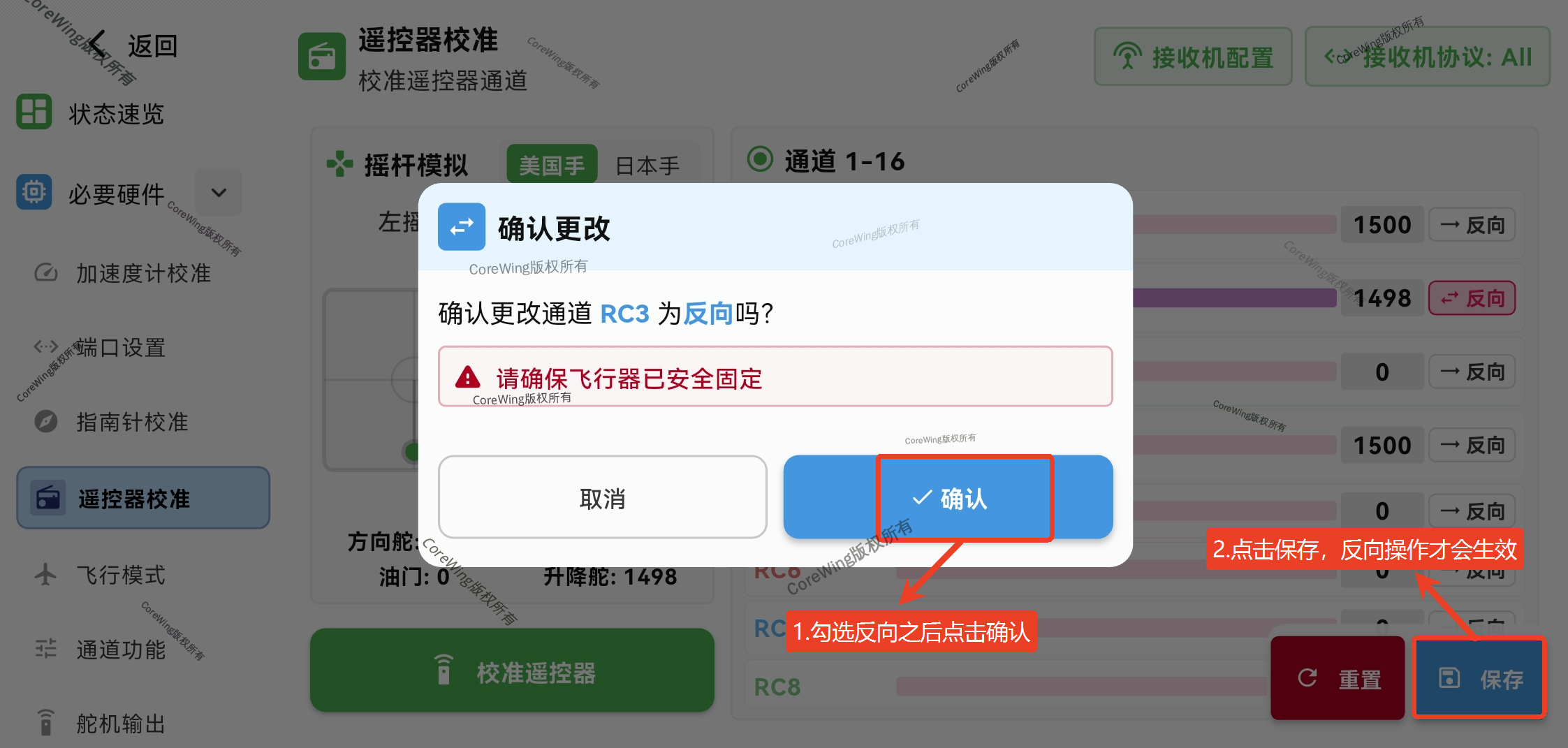
2.2.4 遥控器校准
重要
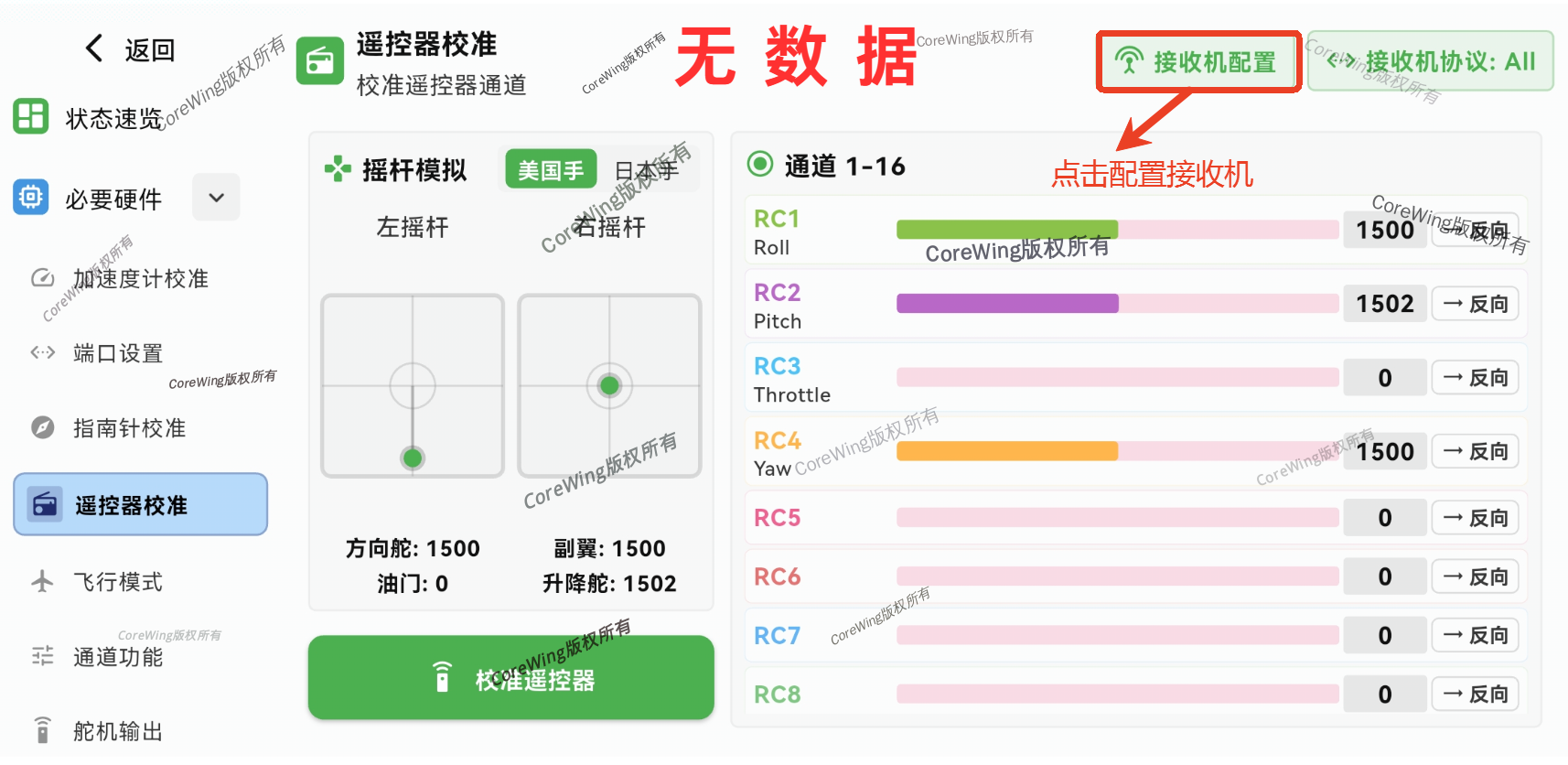
注意:在校准遥控器之前,要确认遥控器与接收机正确对频,是否有数据接收;并且遥控器的微调键需要回归中位,否则会导致遥控器校准不准确。
无数据状态,点击右上角可以选择接收机配置
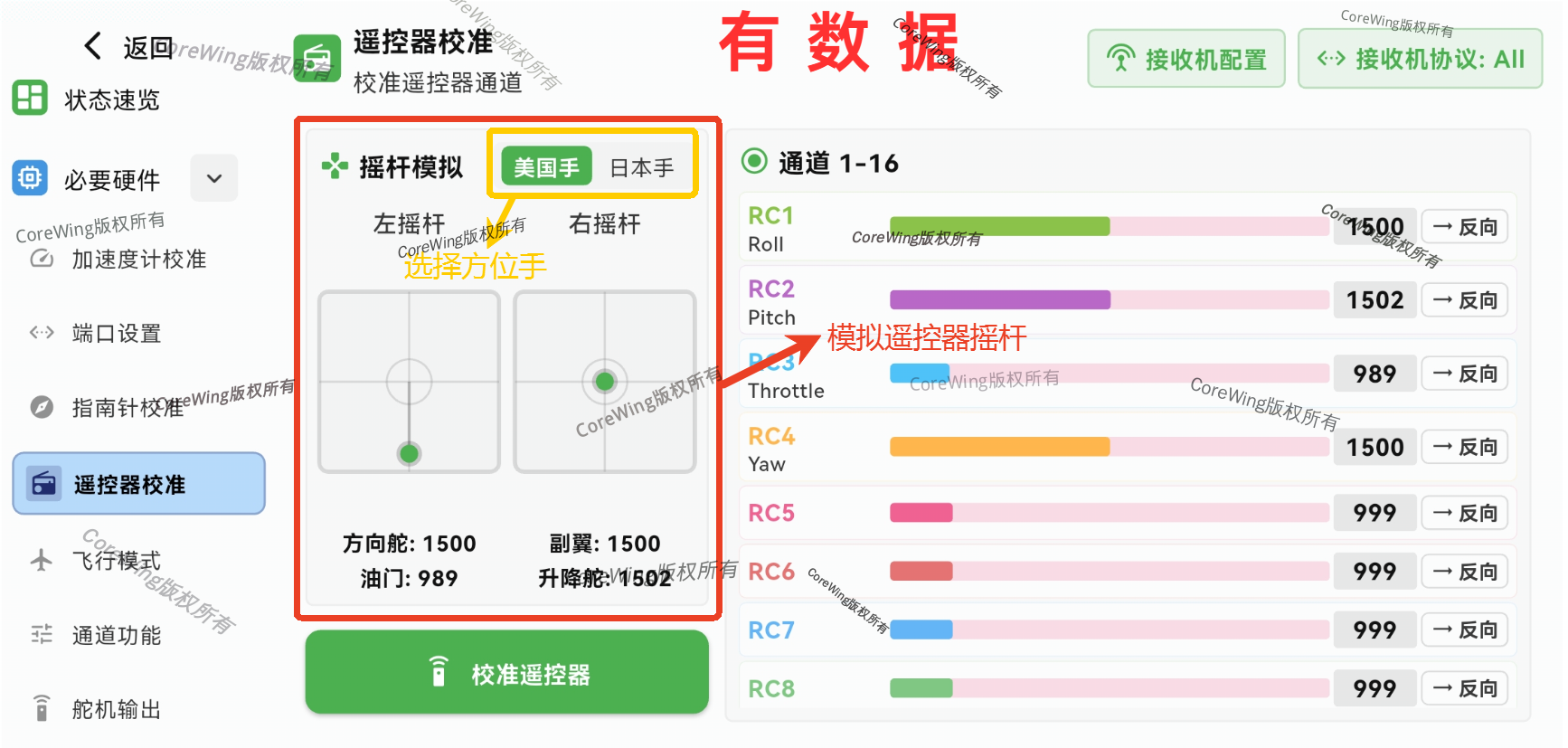
有数据状态,移动摇杆,可以模拟遥控器摇杆的映射
点击校准遥控器,正在校准过程中
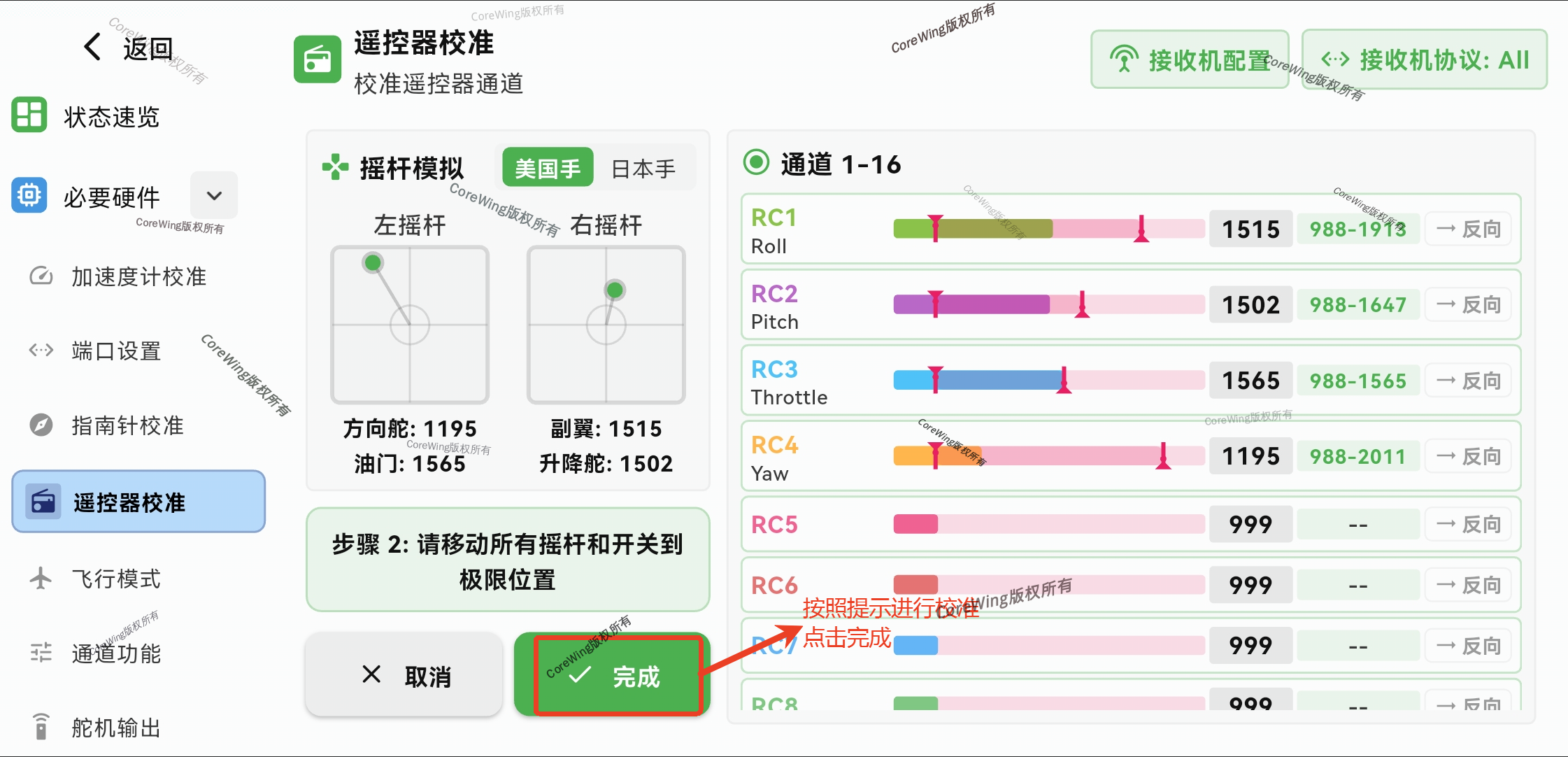
勾选反向后,要点击保存,反向操作才会生效
重要
注意:RC3油门通道和设置解锁的通道慎重勾选反向,避免造成安全隐患!!!
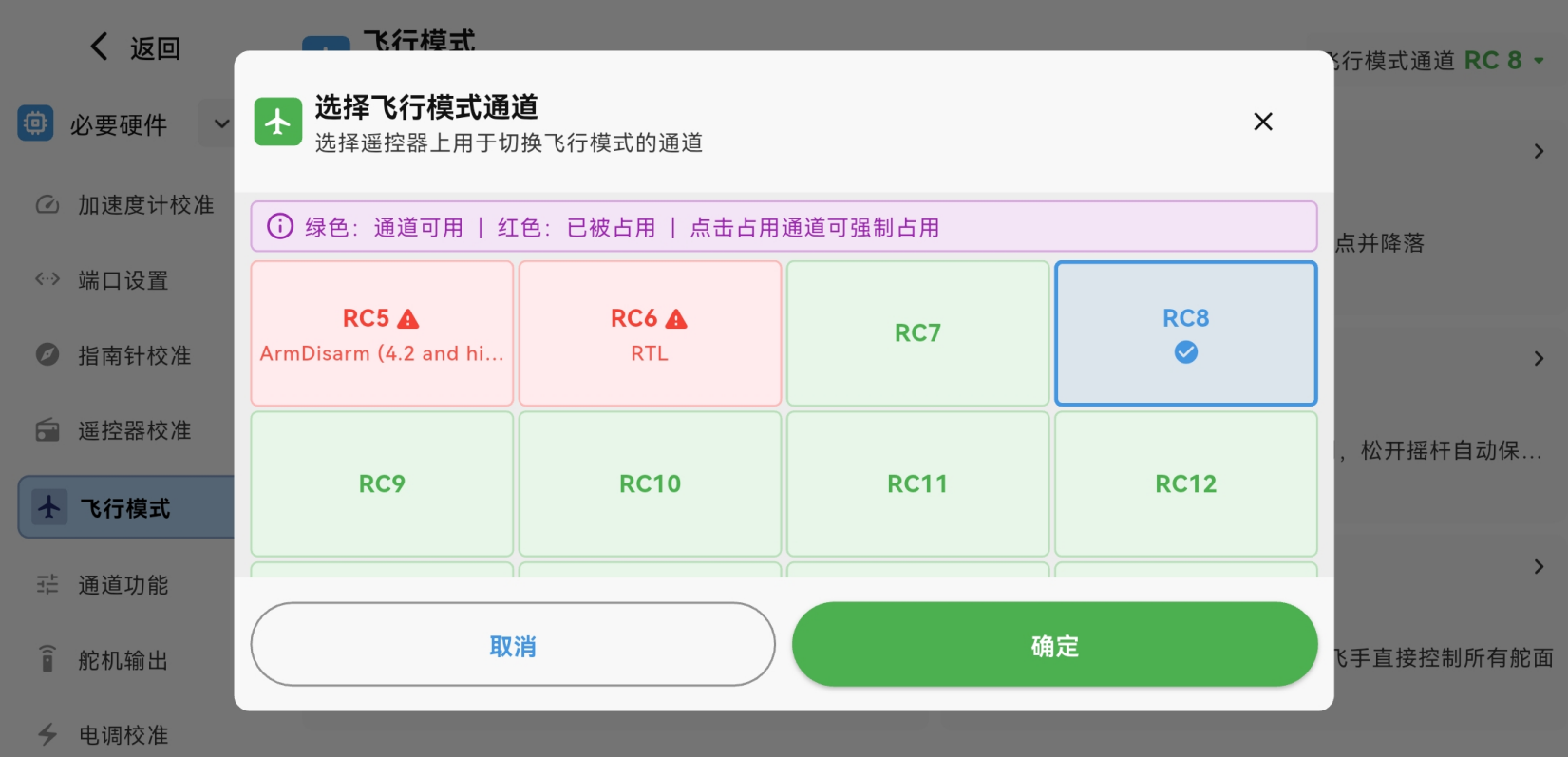
2.2.5 飞行模式
飞行模式:支持配置6个不同的飞行模式,配置方式与MP地面站一致。点击对应的飞行模式通道进行配置,飞行模式分为常用模式和其他模式

飞行模式通道:默认飞行模式通道为 RC8,但用户可以自行选择其他通道进行配置。
绿色框表示该通道未分配功能,可用于配置飞行模式;
红色框表示该通道已被其他功能占用,可以强制占用用于飞行模式,但是不建议这样操作。
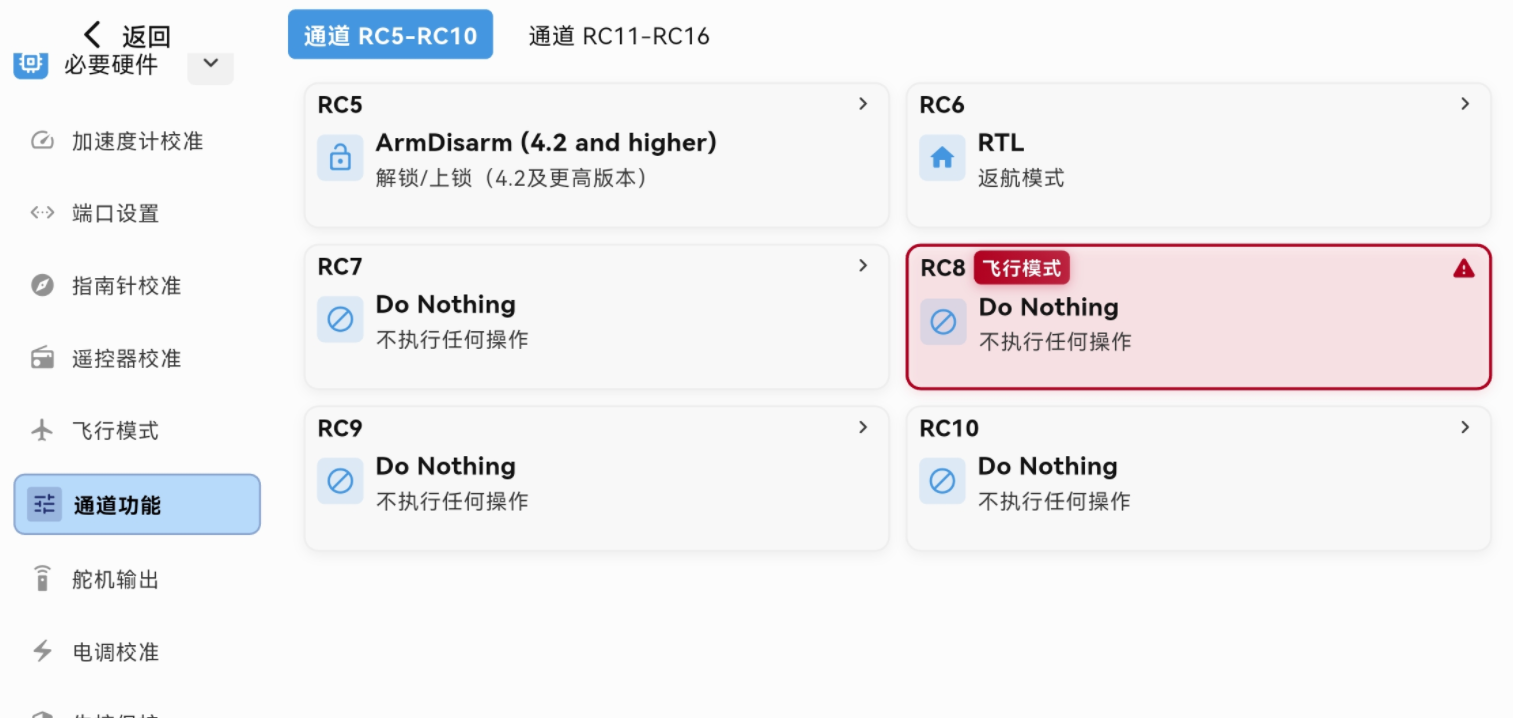
2.2.6 通道功能
用于配置飞控的通道功能,分为常用通道(RC5-RC10)和非常用通道(RC11-RC16)两部分。每个通道可以分配不同的功能,以适应飞行器的操作需求。
点击对应通道,用户可以选择不同的功能进行配置,功能会分为常用功能和全部功能。已分配功能的通道会显示功能名称,未分配功能的通道则显示“Do Nothing”。
重要
注意:默认RC8是飞行模式通道,不支持配置其他功能。如果想要配置RC8,请先在“飞行模式”页面更改其他通道作为飞行模式通道。
2.2.7 舵机输出
切换机型:点击右上角切换机型,根据实际需求一键配置飞翼、V尾、T尾、Y3垂起、4+1垂起等机型。

飞翼(单发)飞机类型舵机功能配置如下:
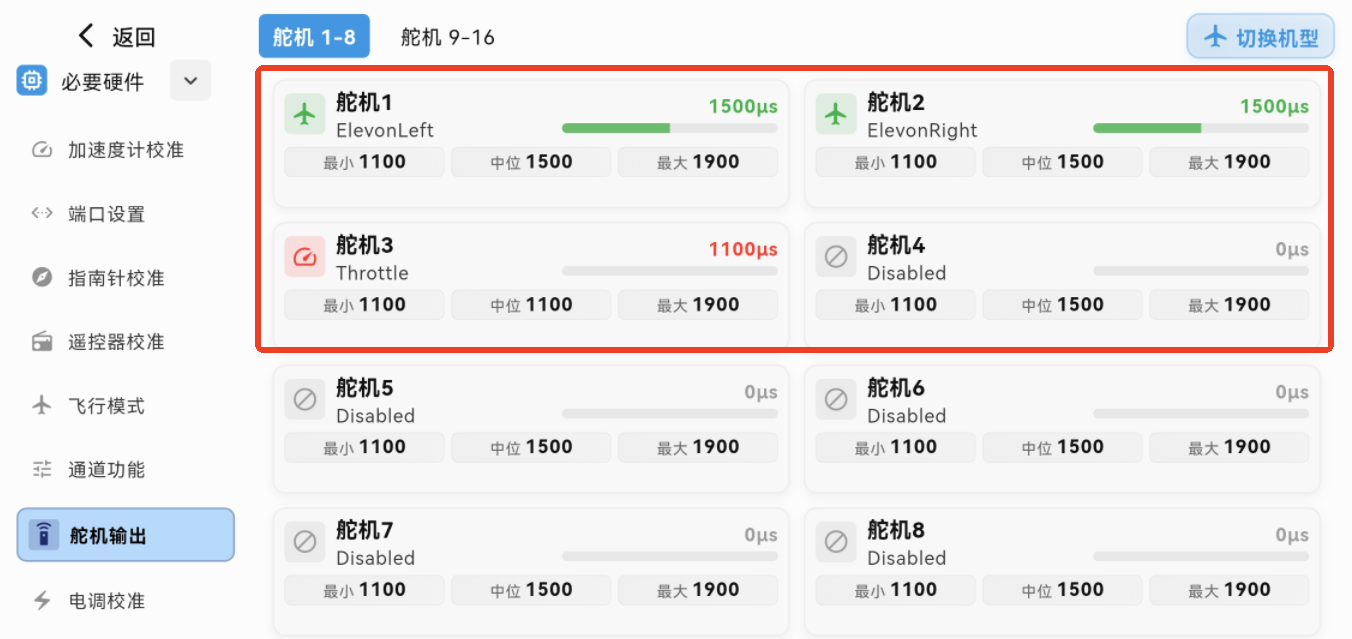
通道 输出 说明 S1 Elevonleft 升降副翼左 S2 ElevonRight 升降副翼右 S3 Throttle 油门 飞翼(双发)飞机类型舵机功能配置如下:
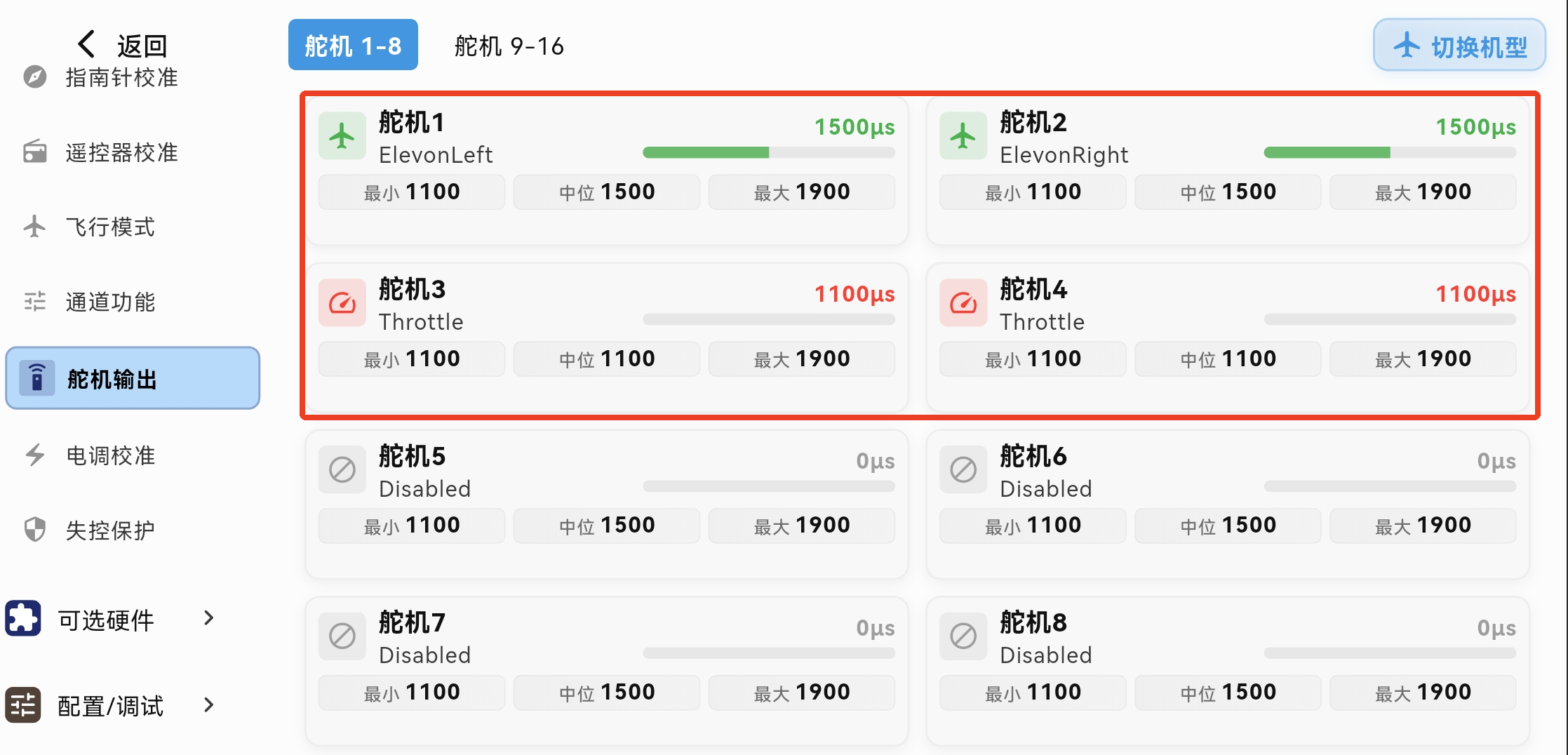
通道 输出 说明 S1 Elevonleft 升降副翼左 S2 ElevonRight 升降副翼右 S3 Throttle 油门 S4 Throttle 油门 T尾(单发)飞机类型舵机功能配置如下:

通道 输出 说明 S1 Aileron 副翼 S2 Aileron 副翼 S3 Elevaror 升降舵 S4 Rudder 方向舵 S5 Throttle 油门 T尾(双发)飞机类型舵机功能配置如下:

通道 输出 说明 S1 Aileron 副翼 S2 Aileron 副翼 S3 Elevaror 升降舵 S4 Rudder 方向舵 S5 Throttle 油门 S6 Throttle 油门 V尾(单发)飞机类型舵机功能配置如下:

通道 输出 说明 S1 Aileron 副翼 S2 Aileron 副翼 S3 VTaiLeft 左V尾 S4 VTailRight 右V尾 S5 Throttle 油门 V尾(双发)飞机类型舵机功能配置如下:

通道 输出 说明 S1 Aileron 副翼 S2 Aileron 副翼 S3 VTaiLeft 左V尾 S4 VTailRight 右V尾 S5 Throttle 油门 S6 Throttle 油门 Y3飞机类型舵机功能配置如下:

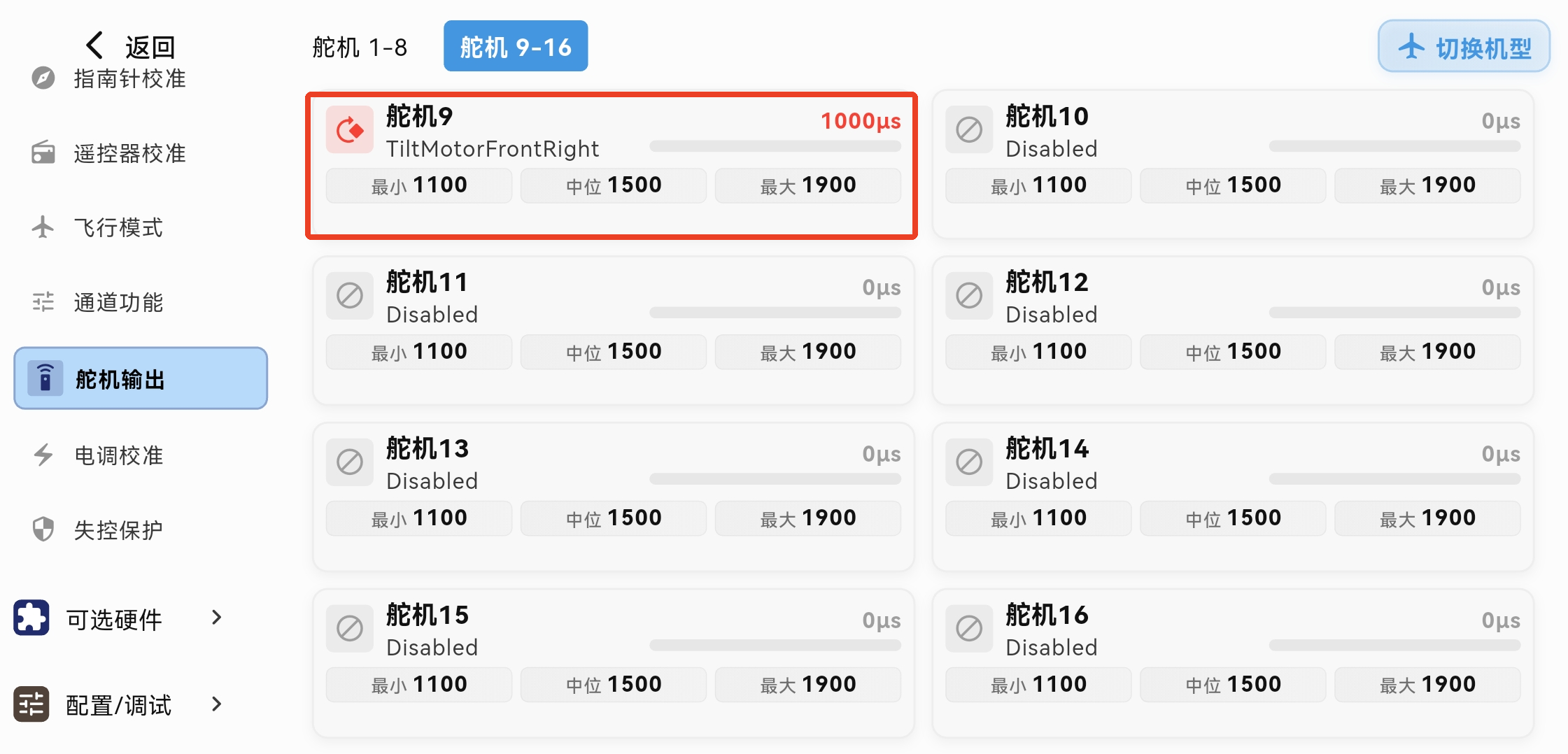
通道 输出 说明 S1 Aileron 副翼 S2 Aileron 副翼 S3 VTaiLeft 左V尾 S4 VTailRight 右V尾 S5 Motor2 左前电机 S6 Motor1 右前电机 S7 Motor4 后电机 S8 TiltMotorFrontLeft 左倾转舵机 S9 TiltMotorFrontRight 右倾转舵机 4+1垂起飞机类型舵机功能配置如下:
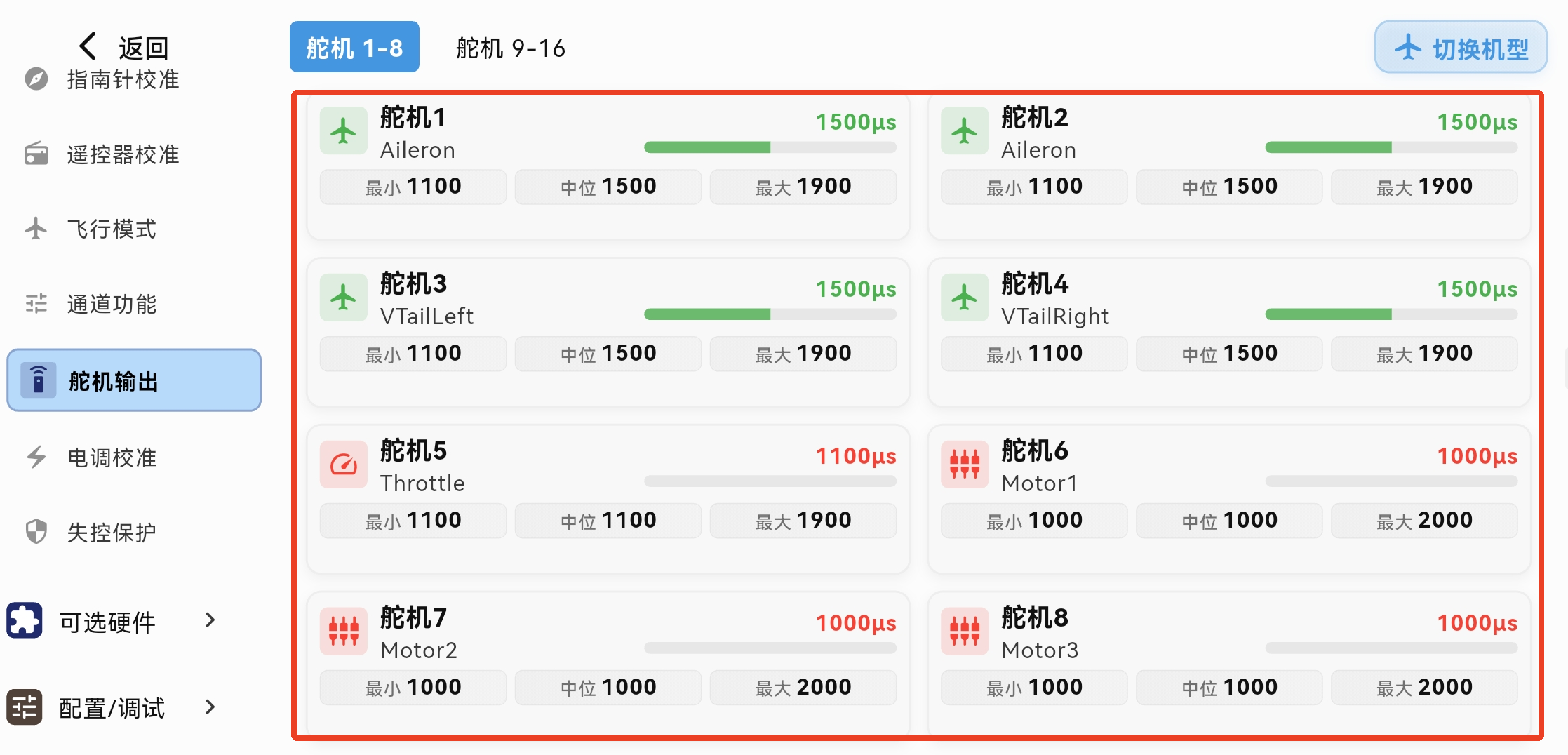

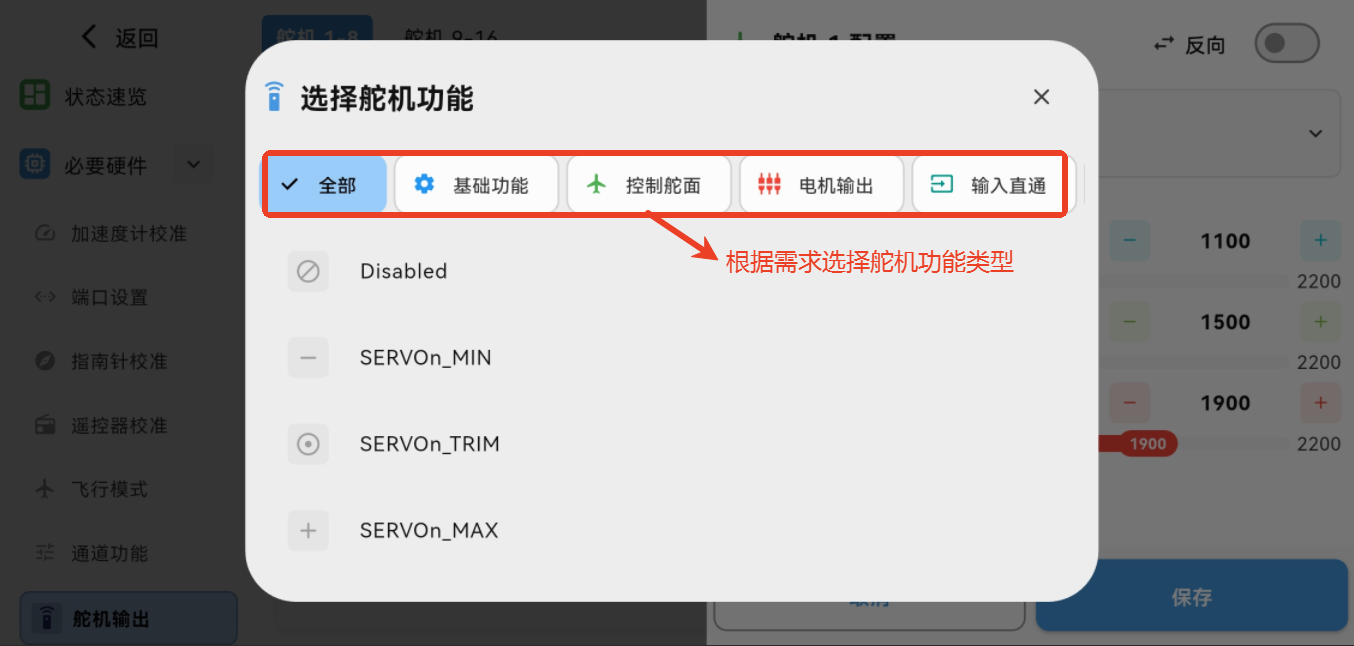
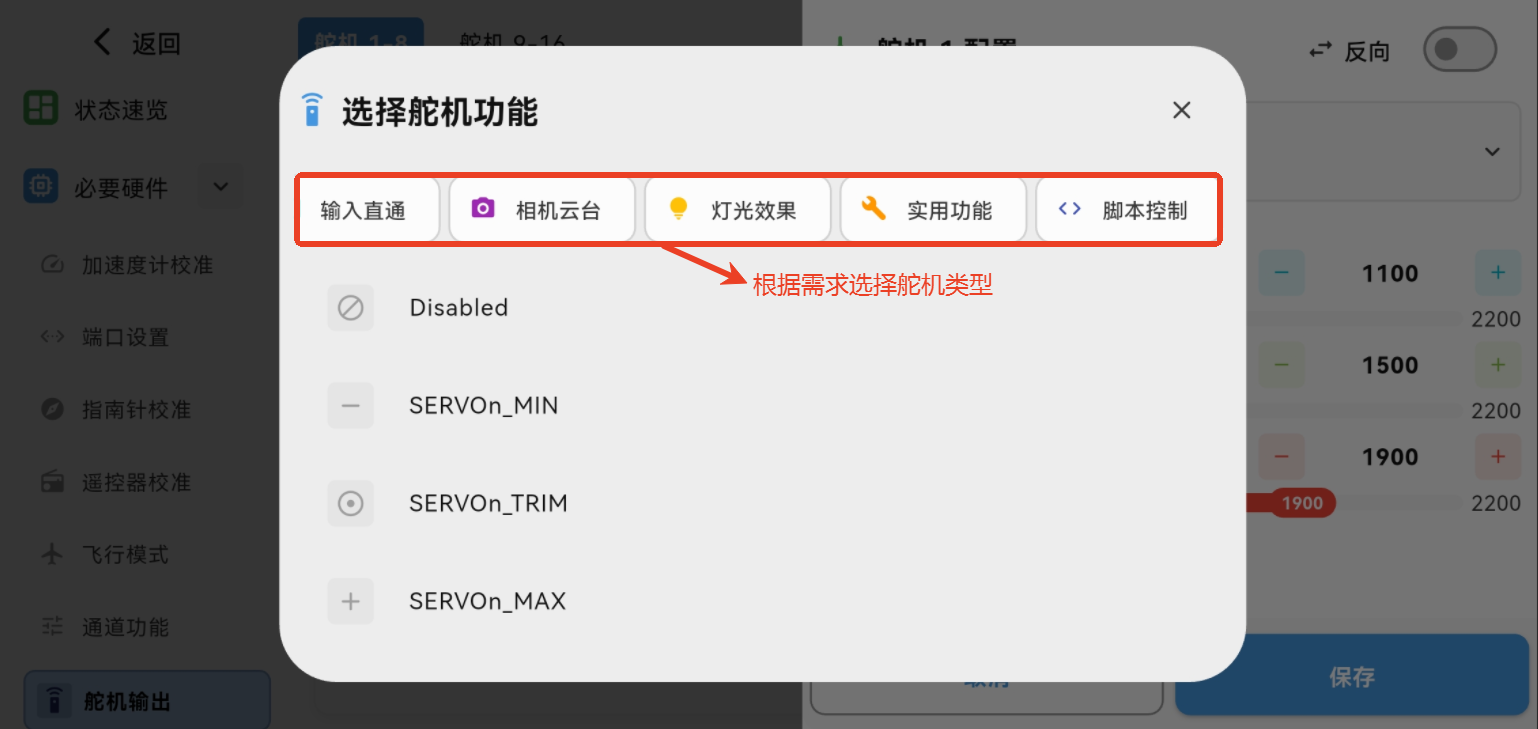
通道 输出 说明 S1 Aileron 副翼 S2 Aileron 副翼 S3 VTaiLeft 左V尾 S4 VTailRight 右V尾 S5 Throttle 油门 S6 Motor2 右前电机 S7 Motor1 左后电机 S8 Motor3 左前电机 S9 Motor4 右后电机 舵机配置:点击对应舵机栏,可以支持勾选舵机反向,选择舵机功能,调节输出最大值、最小值、中位值。


选择舵机功能:根据不同选项的作用进行分类
基础功能:关于设置对应输出通道的最小最大和中位PWM值
控制舵面:关于设置副翼、升降舵、方向舵等相关功能
电机输出:关于设置油门、电机、倾转舵机等相关功能
输入直通:关于设置遥控输入信号相关功能
相机云台:关于设置相机云台相关功能
灯光效果:关于设置LED灯相关功能
实用功能:关于设置输出通道特殊的相关功能
脚本控制:关于设置对应输出通道的Lua脚本的相关功能
重要
注意:如果舵机功能修改从舵机混控到电机或者从电机混控到舵机,保存后APP会自行重启
输出参数:可以通过拉动滑块修改输出值,也支持键盘输入数值
当为舵面类型输出,Min值、Trim值和Max值自动设置为1100、1500、1900,通过拉动滑块修改输出值逻辑如下:
trim值始终大于等于min值,max值始终大于等于trim值。
当min值变小时,trim和max的值不变。
当min值变大时,大于等于trim值时,trim值跟随min值一同变大;min值大于等于max值时,trim值和max值跟随min值一同变大。
当trim值变小时,小于等于min值时,min值跟随trim值一同变小;trim值大于等于max值时,max值跟随trim值一同变大。
当max值变小时,小于等于trim值时,trim值跟随max值一同变小;max值大于等于trim值时,min值和trim值不跟随变大。
当为电机类型输出,,Min值、Trim值和Max值自动设置为1100、1100、1900,通过拉动滑块修改输出值逻辑如下:
min值始终等于trim值,max值始终大于等于trim和min值。
trim值变大到等于max值时,max值和trim值的值会一同跟随变大。
min值变大\小,trim值要跟随一同变大\小;trim值变大\小,min值也会跟随一同变大\小。
max值变大时,min和trim不跟随变大。
max值变小时,min和trim始终小于等于max值。
使用键盘输入数值,修改输出值的逻辑如下:
当为舵机类型时,修改min值大于等于trim值时,trim值会在min值的基础上加50的输出量;修改min值大于等于max值,trim值和max值会在min值的基础上分别增加50和100的输出量;同理,修改max值小于等于trim值或者min值,trim值或者min值依次减少50的输出量。
当为电机类型时,min值和trim值输出值保持一致,修改min值或trim值大于等于max值,max值在min值和trim值的基础上增加50的输出量;修改max值小于等于min值和trim值,min值和trim值在max值的基础上减少50的输出量。
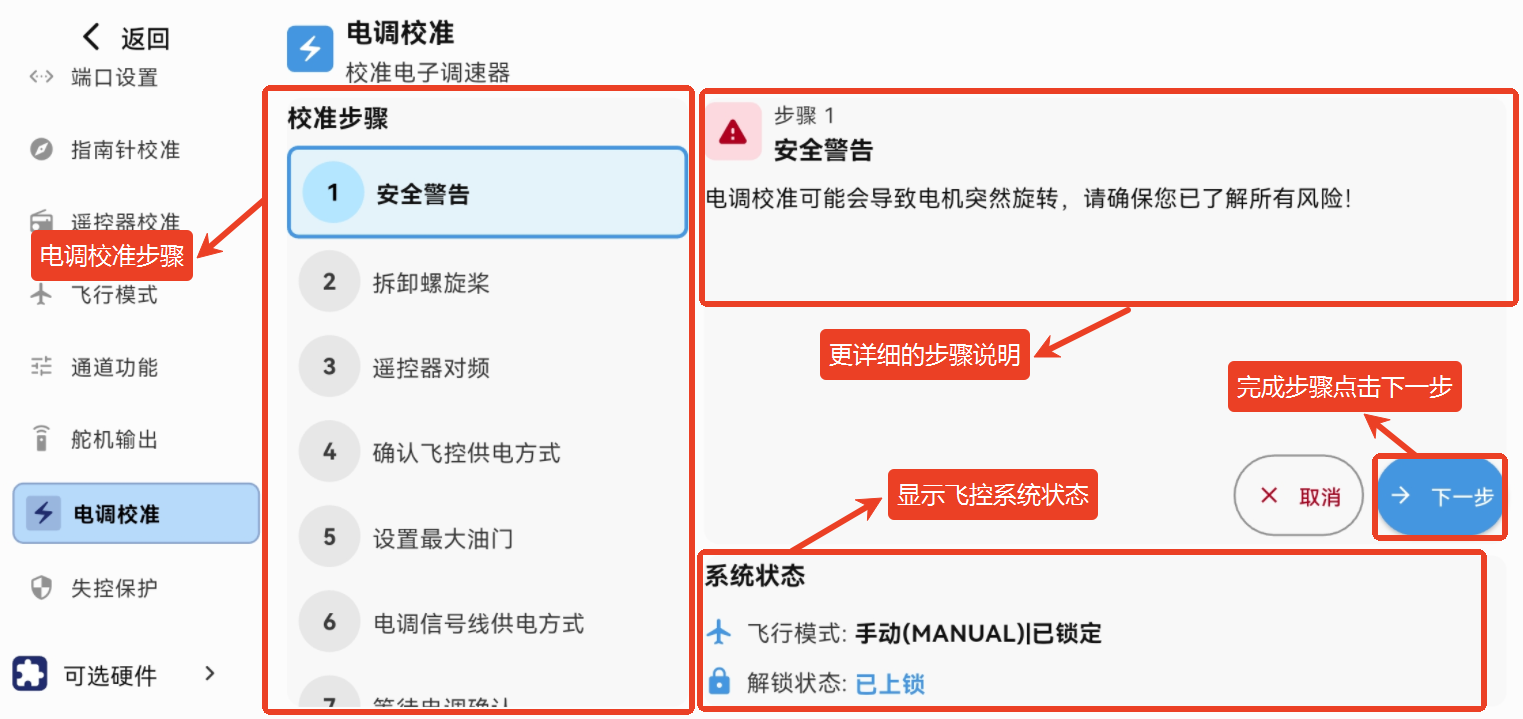
2.2.8 电调校准
安全提示:电调校准前请卸下桨叶,避免误转造成危险。
点击“我已了解,开始校准”,按照校准步骤的提示进行电调校准。
电调校准需要使用USB数据线给飞控供电,以此保持 蓝牙连接 ,才能进行正常调参。
重要
由于选择供电方式不同,电调校准的步骤会有一些差别,请严格按照界面提示执行相应校准步骤。
2.2.9 失控保护
用于配置飞行器在遥控信号中断、电量过低等异常情况下的自动保护行为,确保飞行安全,防止坠机或失联。
失控保护开关:开启后,当飞控检测到遥控信号丢失或油门值低于设定阀值时,将自动执行预设动作
低电压保护:当电池电压或剩余容量低于设定阀值时,触发低电压保护动作。
短时失效保护:当遥控信号暂时中断时触发,触发短时失效保护。
长期失效保护:当遥控信号长时间丢失时触发,触发长期失效保护。

2.3 可选硬件
2.3.1 电池检测器
用于配置和校准飞控的电池监测功能,使系统能够准确显示电压、电流与剩余电量。
基本设置:配置监控器型号、电池容量、APM版本、传感器类型
实时数据:实时显示从电池传感器读取并经系统计算的监测结果
校准:通过输入实测值,系统可自动调整电压与电流的比例系数,使读数更精准。

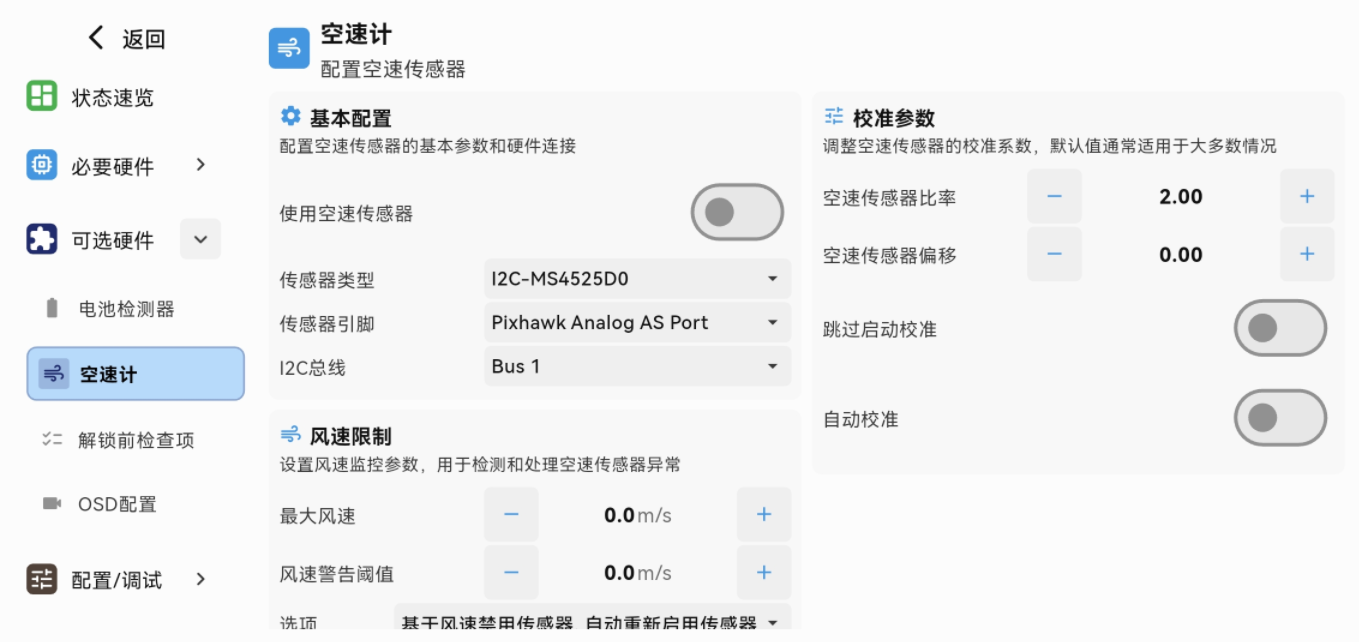
2.3.2 空速计
基本配置:启用空速传感器,配置空速传感器的基本参数和硬件连接,设置传感器类型、传感器引脚、I2C总线。
风速限制:用于设定空速数据异常时的处理范围和警报阈值。
最大风速(ARSPD_WIND_MAX):限定允许的最高空速值,超过此值将触发警告
风速警告阈值(ARSPD_WIND_WARN):当测得空速超过该值时,系统会提示异常。
空速传感器选项(ARSPD_OPTIONS):可以选择当检测到异常风速时是否自动禁用传感器、当风速恢复正常时是否自动重新启用传感器。
校准参数:调整空速传感器的校准系数,设置空速传感器比率(ARSPD_RATIO)、空速传感器偏移(ARSPD_OFFSET)的数值。
跳过启用校准(ARSPD_SKIP_CAL):开启后,飞控上电时不再自动执行空速零偏校准
自动校准(ARSPD_AUTOCAL):开启后,允许飞控在飞行中动态校准比率参数,提升长期精度。
2.3.3 解锁前检查项
通过检查飞控、遥控器、电池等系统状态,确认飞行器处于正常工作状态,避免因故障或配置问题导致飞行事故。
已经选择的解锁前检查项会显示已启用,未选择会显示已禁用。
快捷配置:一键配置解锁前检查项,通过便捷配置和自动化检查,确保飞行器在解锁前满足安全要求。
所有检查:启用所有安全检查项
无内存卡:跳过日志可用Logging Available检查,其余项均开启检查。
无罗盘:跳过罗盘Compass是否正常工作检查,其余项均开启检查。
地形跟随:是否启用地形数据TERRIN_ENABLE检查。

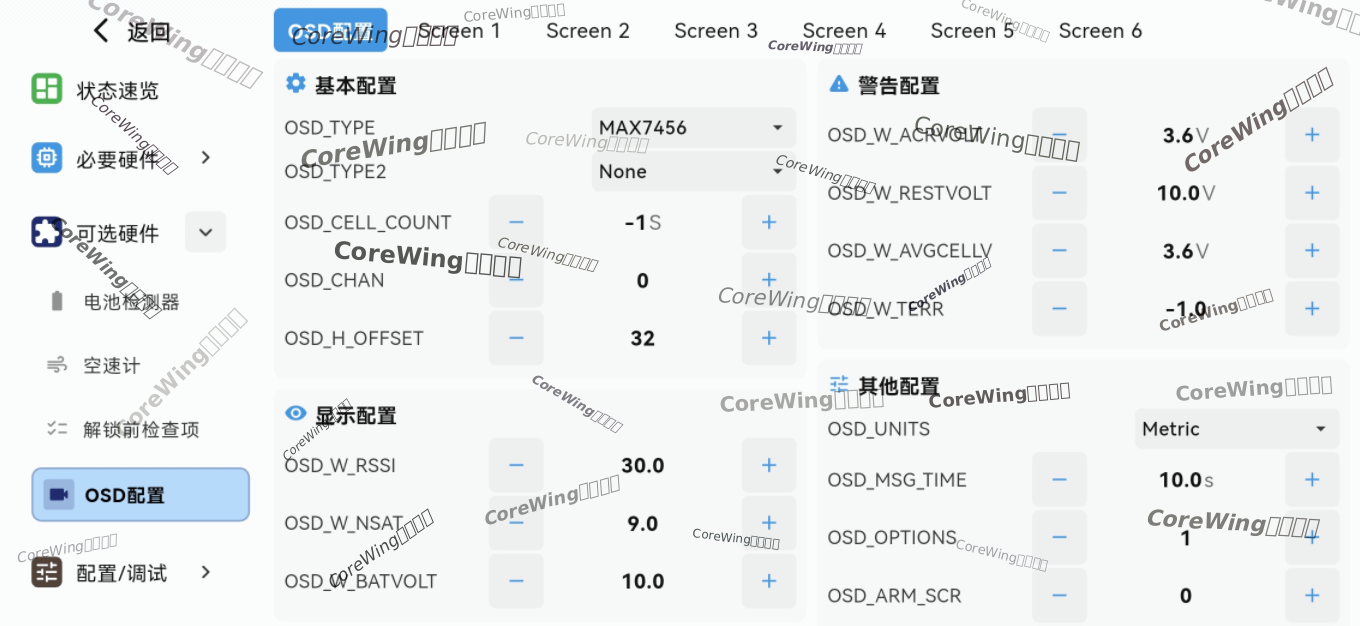
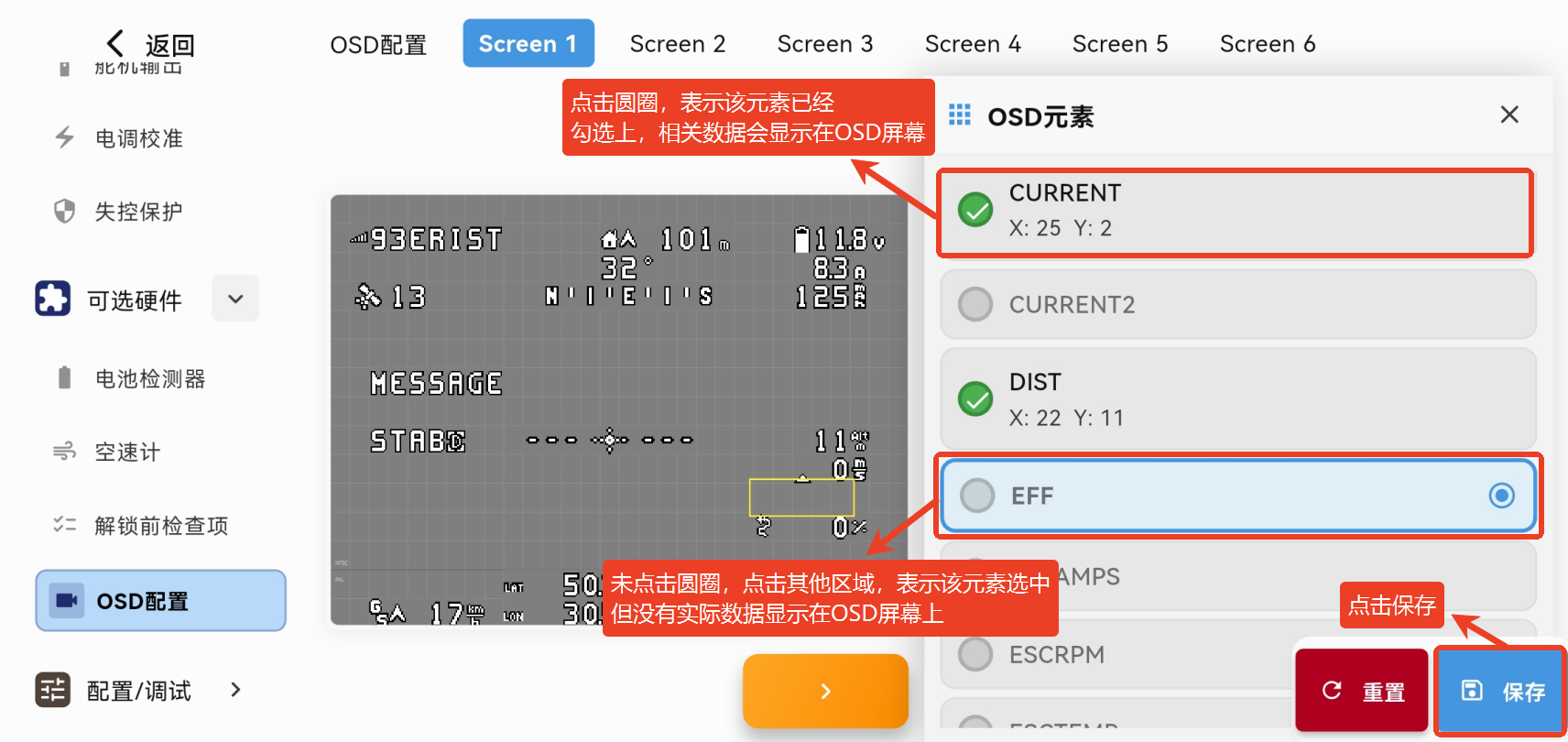
2.3.4 OSD配置
OSD配置:用于配置飞行器的OSD参数,帮助用户在飞行过程中实时查看飞行数据,如电池电压、信号强度、卫星数量等信息
基本配置:用于设置OSD硬件类型、电池电芯数量、显示通道以及显示内容的水平偏移,以确保准确显示飞行数据。
警告配置:在飞行过程中,设置警告阈值以便在关键指标超出预设值时触发提醒
显示配置:配置在OSD界面上显示的关键飞行数据,如信号强度、电池电压等
其他配置:设置OSD显示的单位系统、信息更新时间间隔、其他显示选项,以及起飞和解除ARM的显示状态。
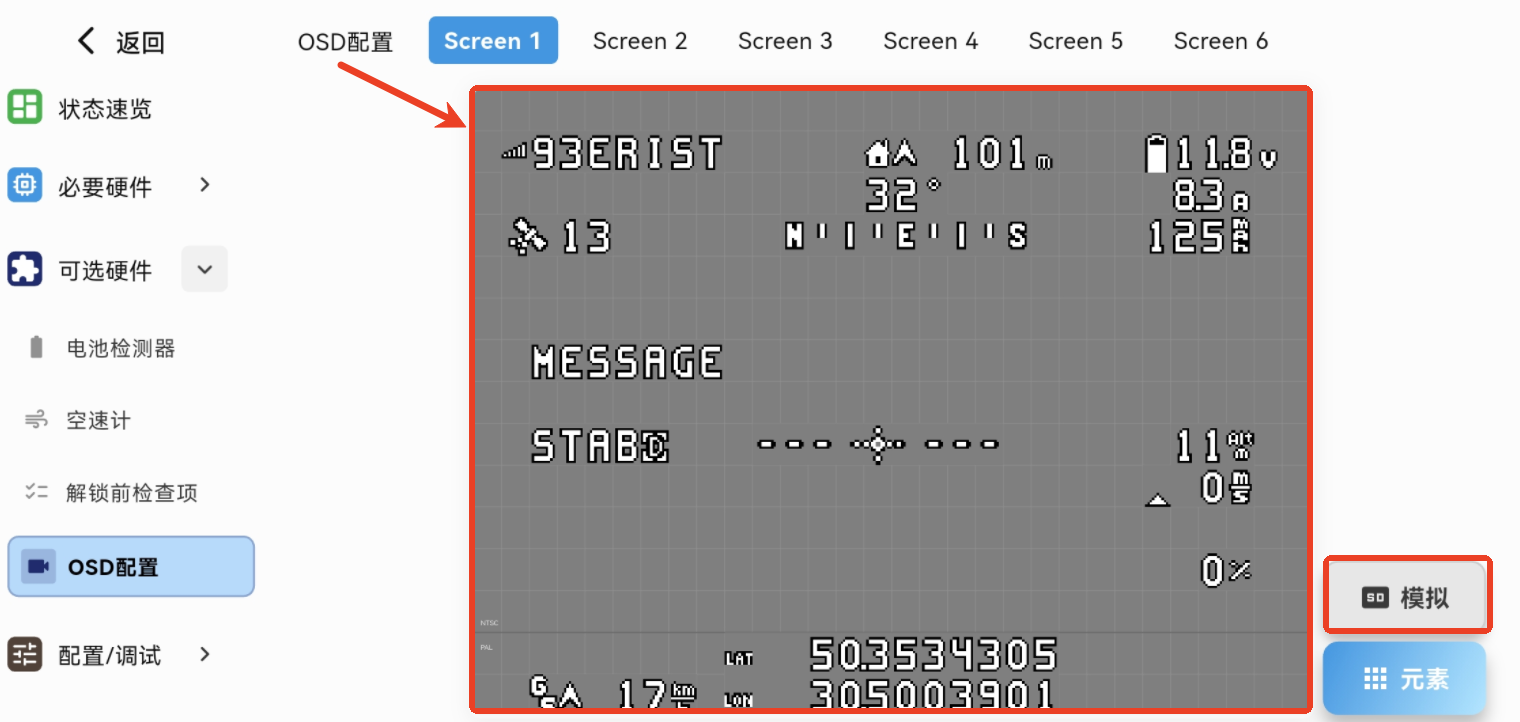
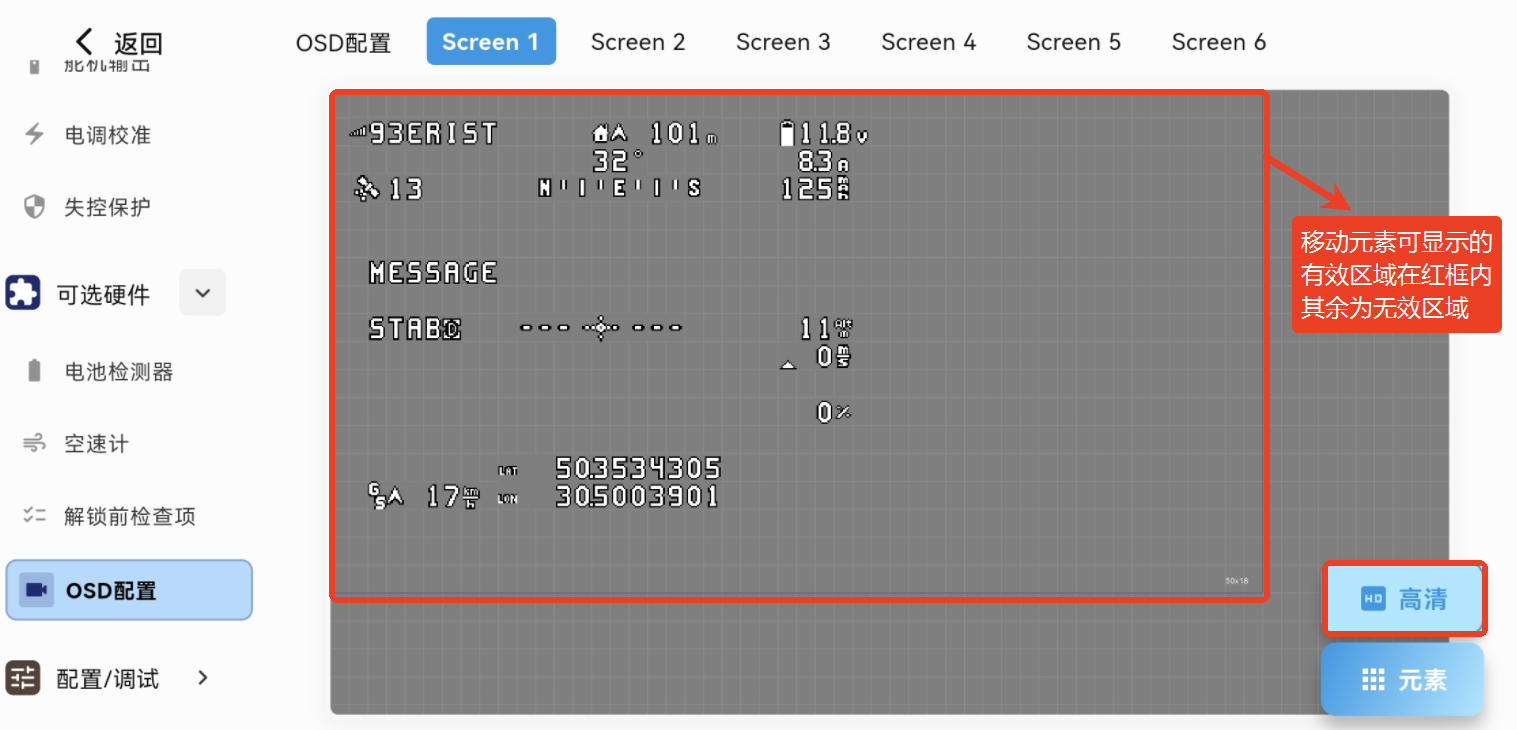
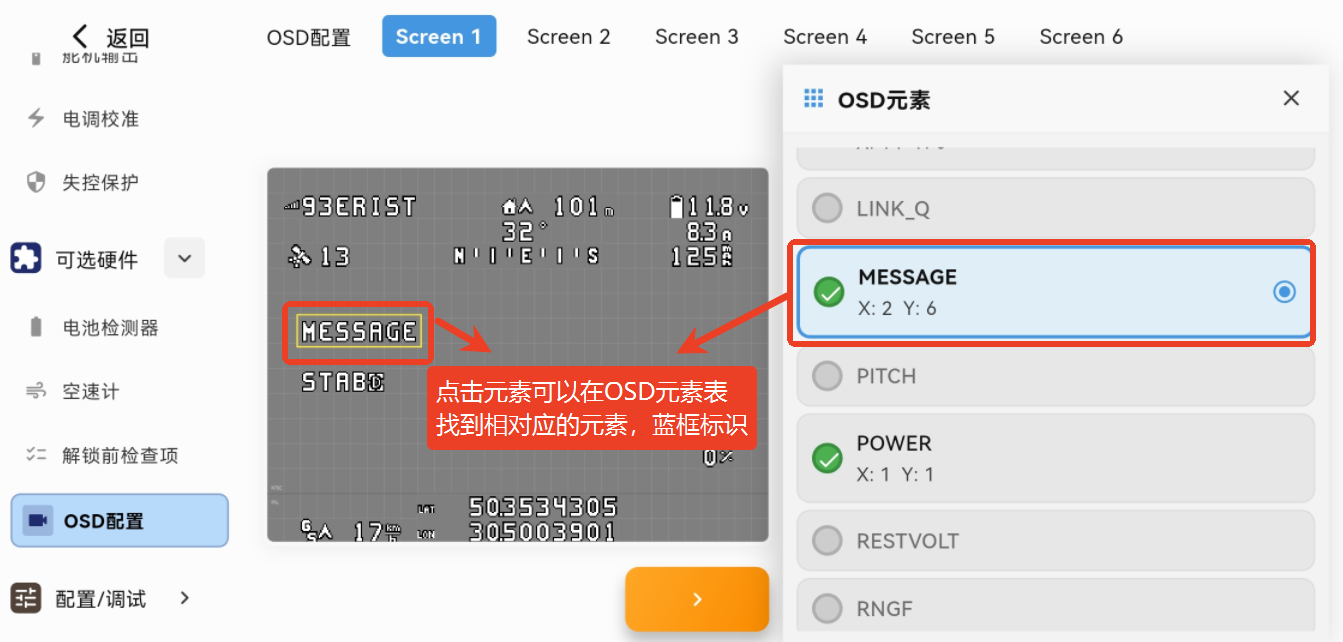
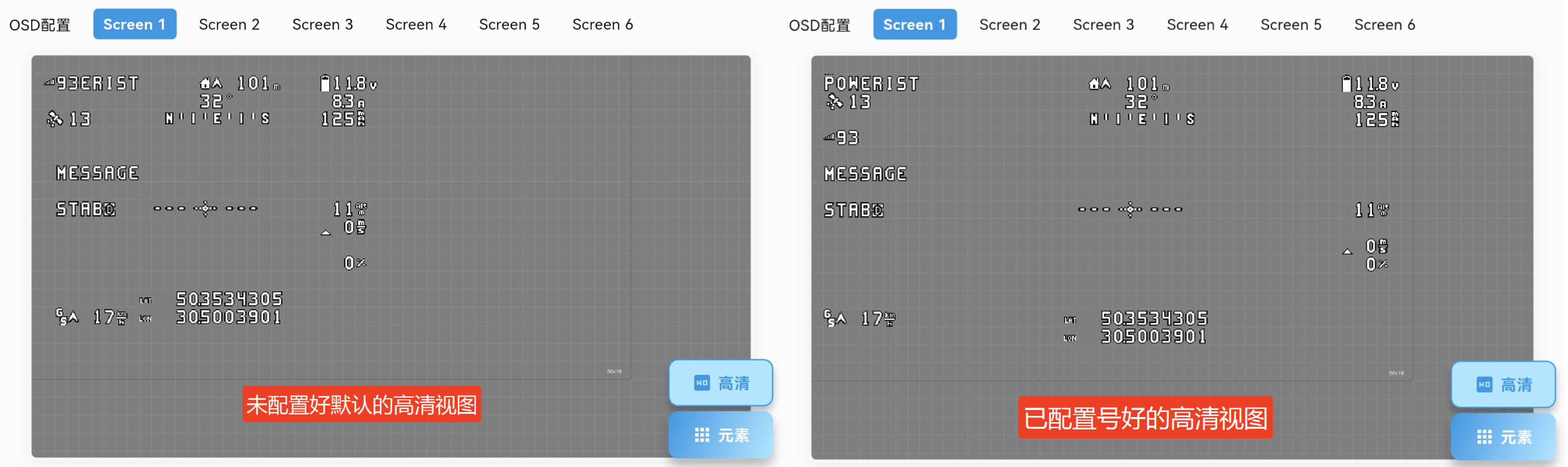
- Screen1:点击拖动显示屏中的osd元素即可改变其位置。支持切换模拟和高清视图以及勾选更多样的OSD元素。

模拟视图的界面如下图所示:
高清视图的界面如下图所示:
选择OSD元素的界面如下图所示:
2.3.5 图传配置
- 图传配置:一键配置视频图传和OSD参数,无需自己设置OSD元素位置以及图传参数,提高调参的速度和效率


设置完成之后可以返回OSD配置的Screen1页面的视图效果
2.4 配置/调试
2.4.1 基本调参
每项参数都支持通过 “+ / –” 按钮微调,也可以点击数值进行键盘输入。
常用设置:用于快速调节飞机最常用的飞控参数
飞行调整:汇集了与飞机姿态、配平相关的核心参数,例如自动配平开关、方向舵混控系数、水平姿态微调、俯仰稳定补偿。
安全设置:用于开启/关闭关键的飞行安全功能,例如电子围栏、返航后自动降落、特技模式锁定
导航设置:用于调整飞行路径相关的参数

油门/空速:用于调整飞行器的油门控制和空速参数,以便优化飞行表现和自动油门控制。
油门参数:控制了飞行器的油门范围与响应速度,以确保稳定输出。
空速参数:确保飞行器保持在安全的飞行速度范围内,避免因速度过低或过高导致的飞行问题。
角度限制:设置控制飞行器的最大俯仰和滚转角度,避免飞行过于激进,影响稳定性。

PID设置:用于调整飞行器的飞行控制PID参数,以优化飞行器的姿态和空速控制表现
横滚速率PID:调节飞行器在进行横滚动作时的响应速度、平稳性和精度,避免过度震荡或迟滞。
俯仰速率PID:控制飞行器俯仰角度变化的速度,确保其快速而稳定地达到目标俯仰姿态。
偏航伺服:用于调整飞行器在偏航控制时,舵机系统的响应。
导航L1控制:调整L1导航控制算法,该算法通常用于航点导航和自动飞行路径规划。
TECS能量控制:确保飞行器在不同飞行模式下能保持平稳的爬升/下降速率,避免过快或过慢的垂直速度。
前馈和混合:进一步调整油门与俯仰、滚转之间的相互影响,优化飞行器的稳定性和控制性能。

重要
垂起PID页面以及垂起设置页面需要在舵机输出页面切换为垂起机型,或在全部参数中启用Q_ENABLE 后才会显示。
垂起PID:用于 VTOL(垂直起降)机型在多旋翼模式下的姿态与速率控制调节。
自稳控制:包含飞机在垂直模式下的角度控制参数。
ROLL 速率 PID:用于控制飞机在垂直模式下横滚(Roll)轴的速率响应。
PITCH 速率 PID:用于控制飞机在垂直模式下俯仰(Pitch)轴的速率响应。
YAW 速率 PID:用于控制飞机在垂直模式下YAW轴的速率响应。
悬停控制:用于控制飞机在悬停状态下的位置与速度控制。
Basic Filters(基础滤波):用于抑制噪声与震动,让 PID 控制更平稳可靠。
油门加速度:用于调节垂直升力(油门)的加速度控制逻辑。

抛飞设置:主要用于让固定翼飞机在 手抛起飞 时更稳定、更安全地进入自动飞行状态
油门与加速度:用于设置起飞推进油门的逻辑与参数。
速度设置:用于设定飞机抬头离地的目标速度。
襟翼设置:适用于带襟翼的机型,用于缩短滑跑距离、提升起飞稳定性。

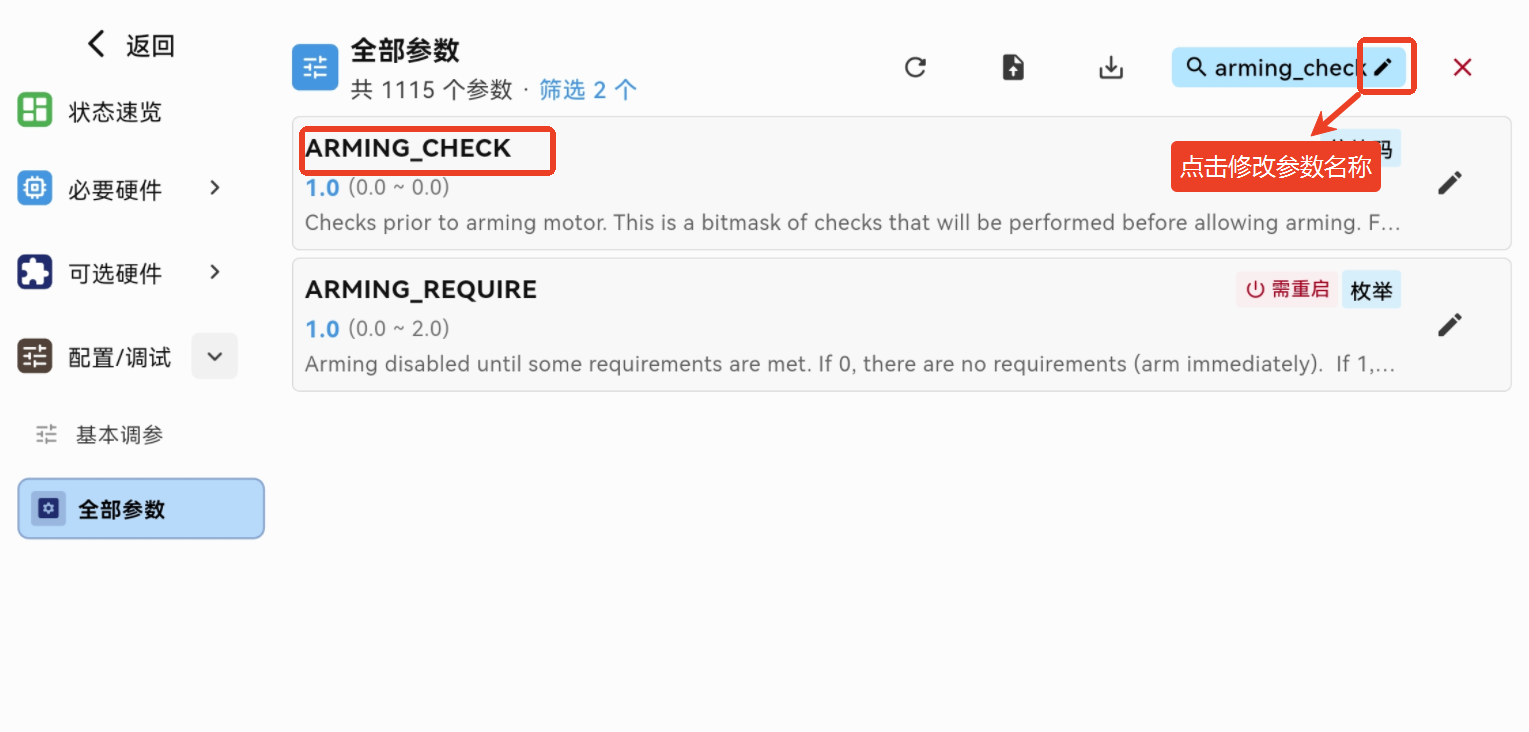
2.4.2 全部参数
- 数值型参数:可以通过点击+-号修改数值,也可以点击直接点击输入框修改数值。

- 单选型参数:可直接勾选相应选项,或点击输入框修改数值
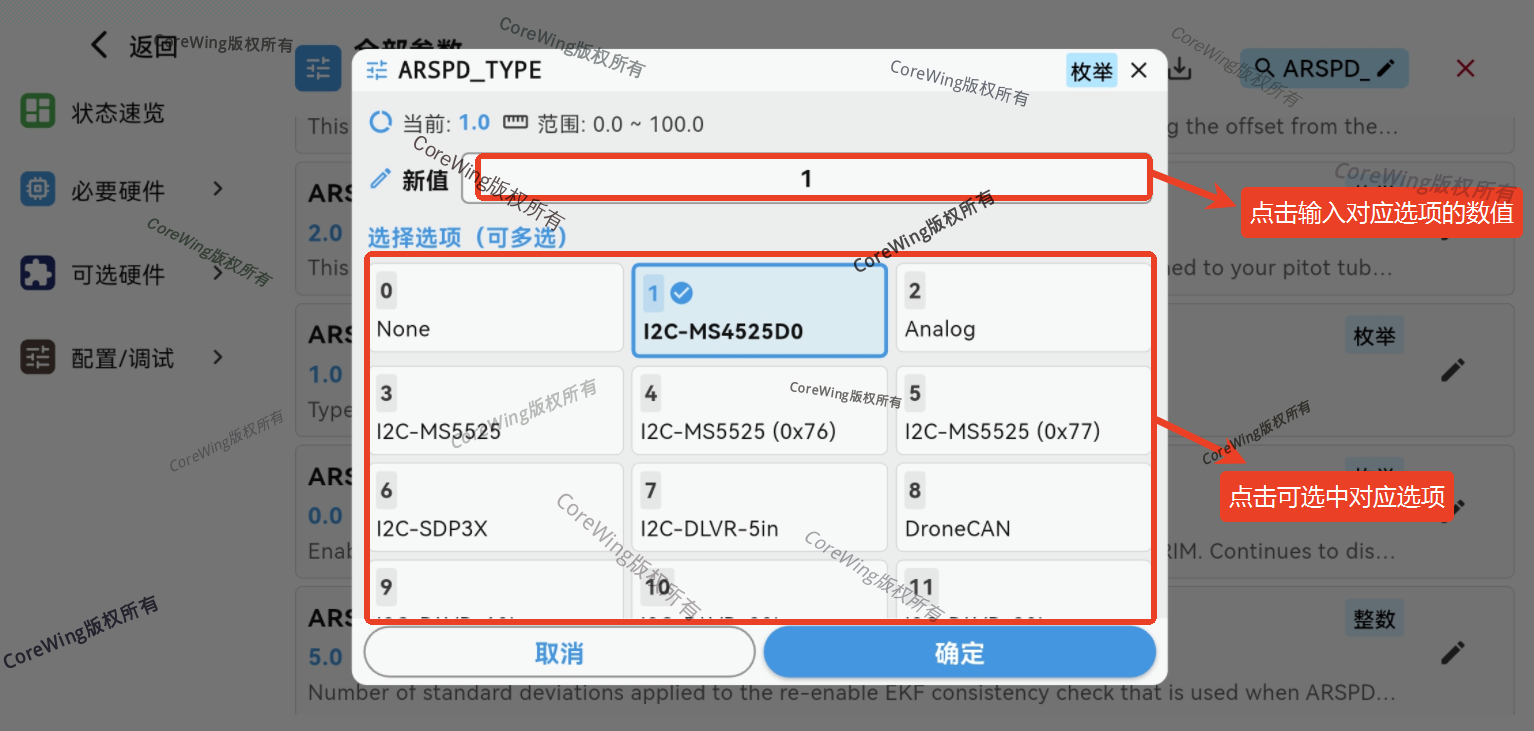
- 多选型参数: 支持勾选多个选项,或者点击输入框修改数值

搜索参数:点击右上角可以直接搜索参数,支持通过输入相关描述查找所需的参数。

重新获取参数:点击按钮重新获取并加载所有参数,确保参数列表是最完整的。
重要
注意:加载获取参数时,请不要退出该界面,否则会导致获取参数不完全

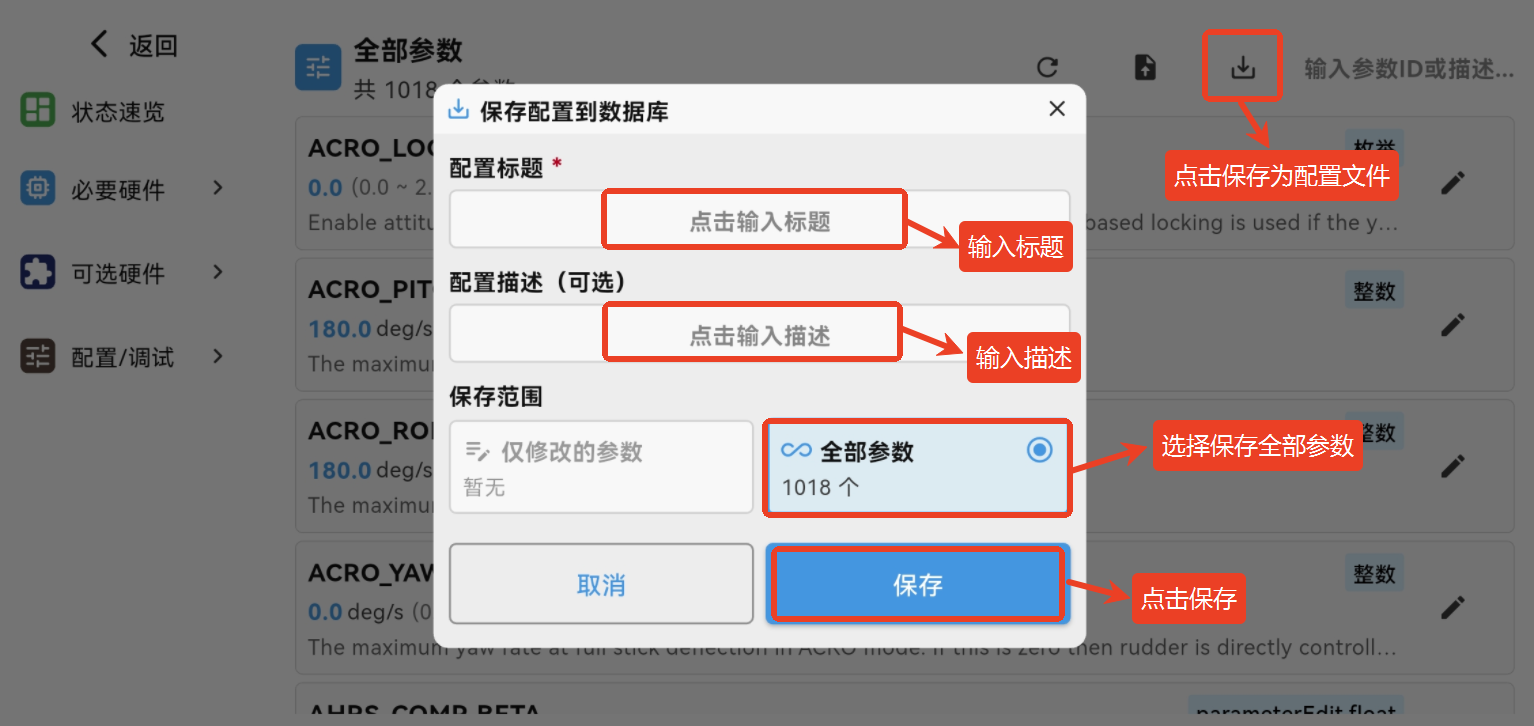
保存为配置文件:输入标题和描述,选择保存范围后,点击“保存”按钮可以将当前配置导出为文件,便于备份或分享。
参数共享
- 保存的配置文件支持在CoreWing APP首页工具箱的“参数中心”查看:

- 全部配置中的参数为其他用户共享,可以选择需要的参数进行下载导入,调机又快又轻松,小白也不用担心调不好飞机,后续CoreWing官方也会上传热门的飞机参数。

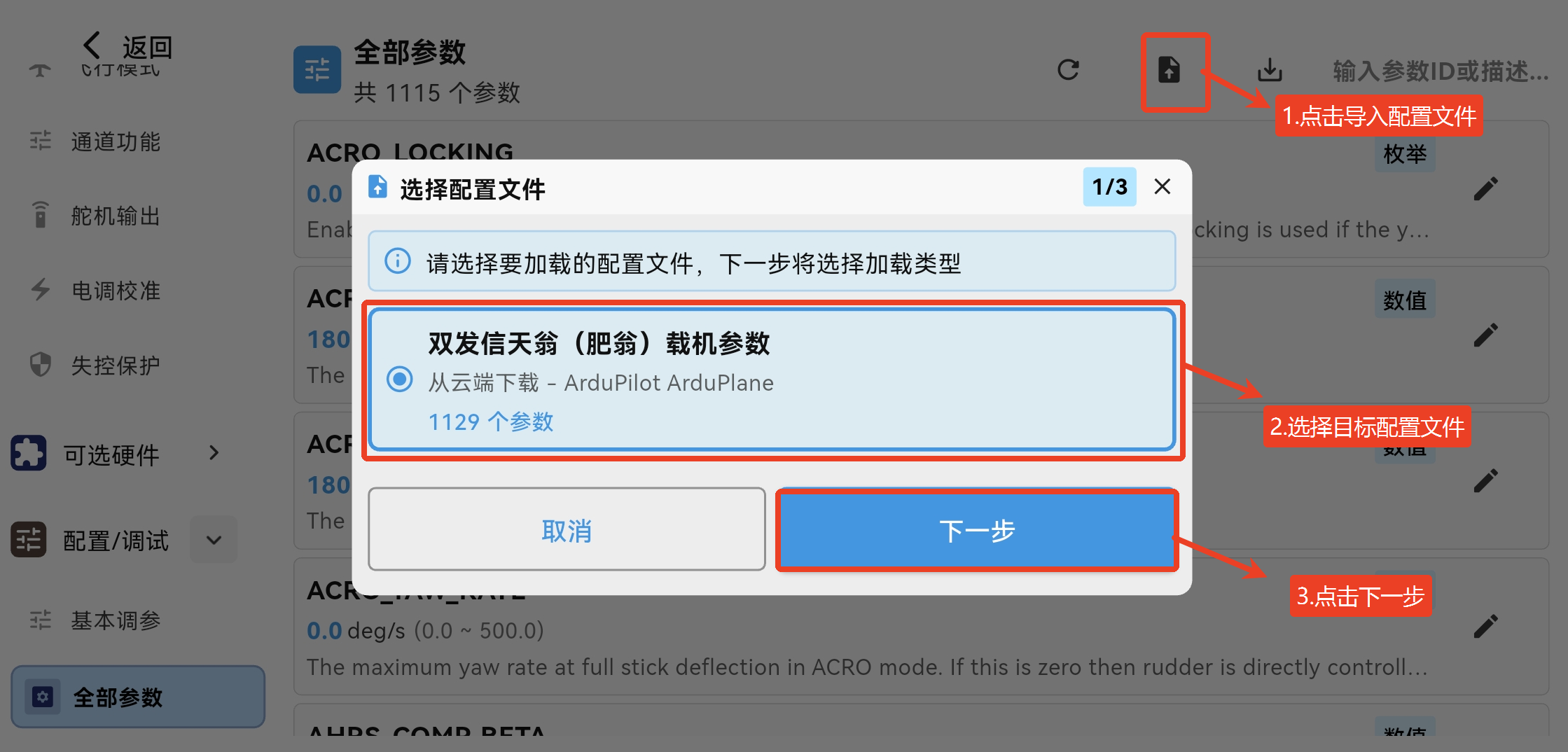
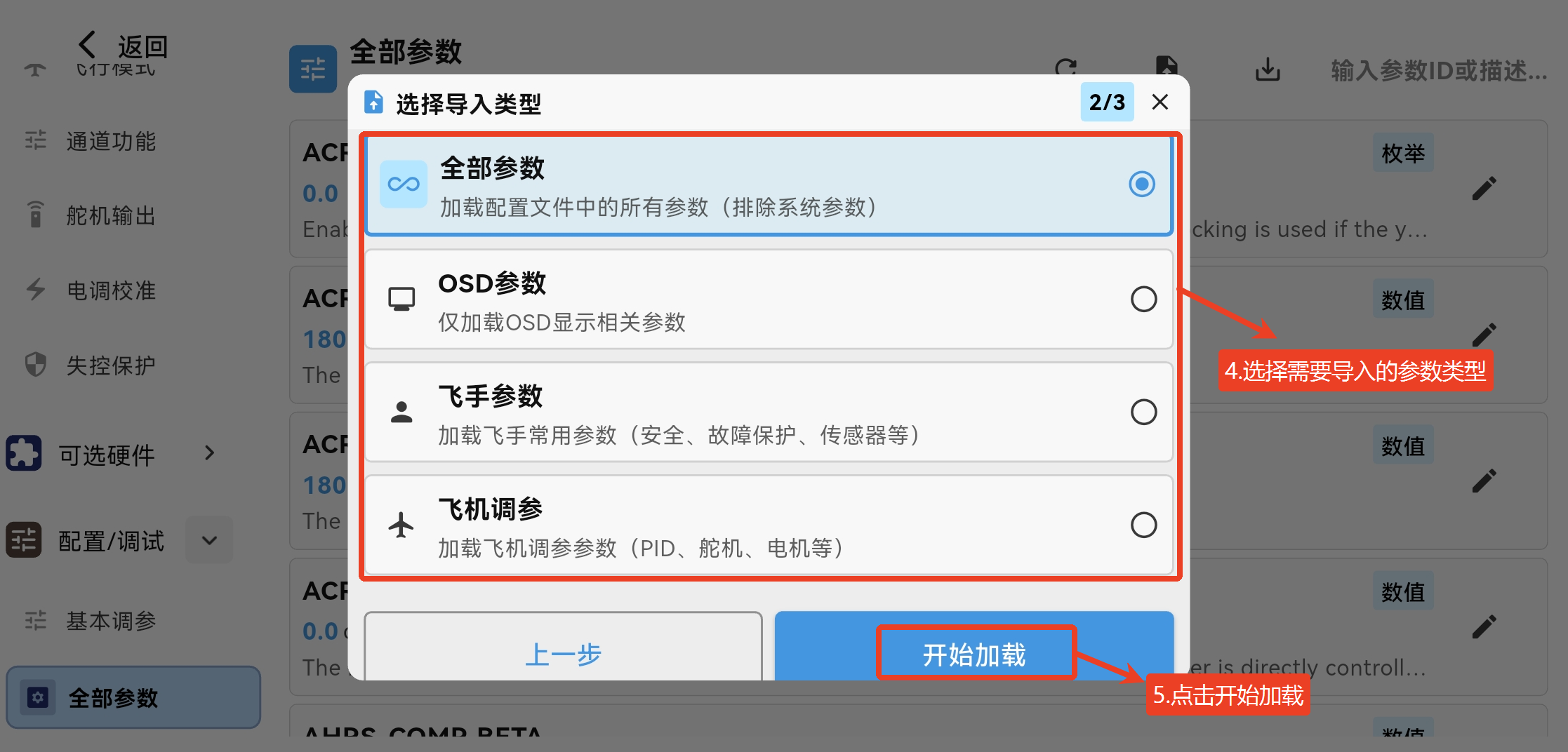
- 导入配置文件:不仅支持导入配置文件的全部参数,也支持只导入其的部分类型参数,如OSD相关参数、飞手相关参数、飞机相关参数,满足 更多用户的需求。
重要
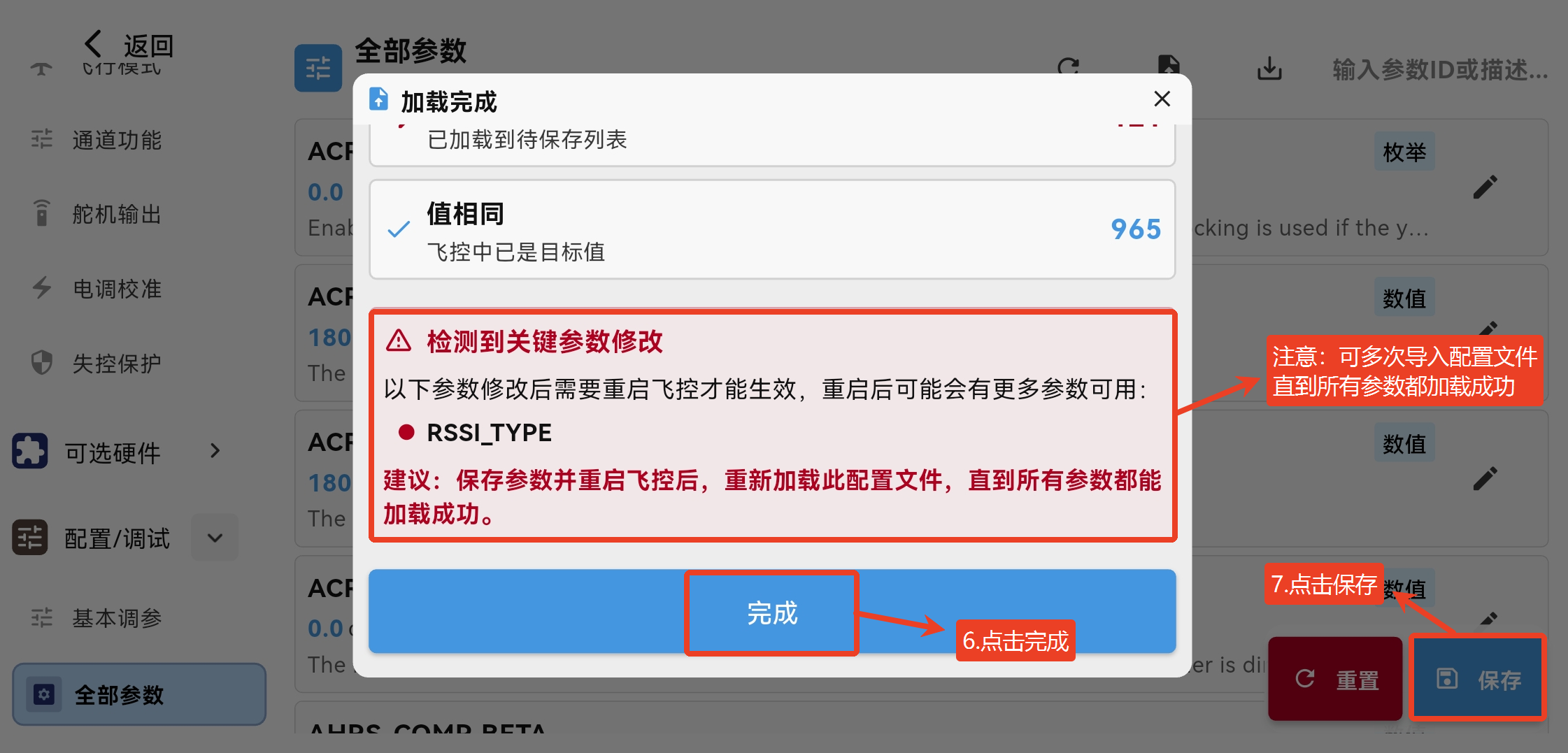
有些参数需要启用后,才会显示更多参数,导致第一次导入配置文件不能将所有参数都写入飞控中,因此要多次导入该配置文件,直到所有参数都能修改成功。
技术支持二维码
