ArduPilot Y3 VTOL Parameter Tuning Guide
I. Flight Principle Introduction
Vertical take-off and landing (VTOL) fixed-wing drones combine multirotor and fixed-wing technologies, using multirotor capabilities for vertical take-off and landing, and switching to fixed-wing mode through a transition mechanism for efficient horizontal flight. During horizontal flight, lift is generated by the wings, and direction and attitude are adjusted by control surfaces.

II. Equipment Preparation
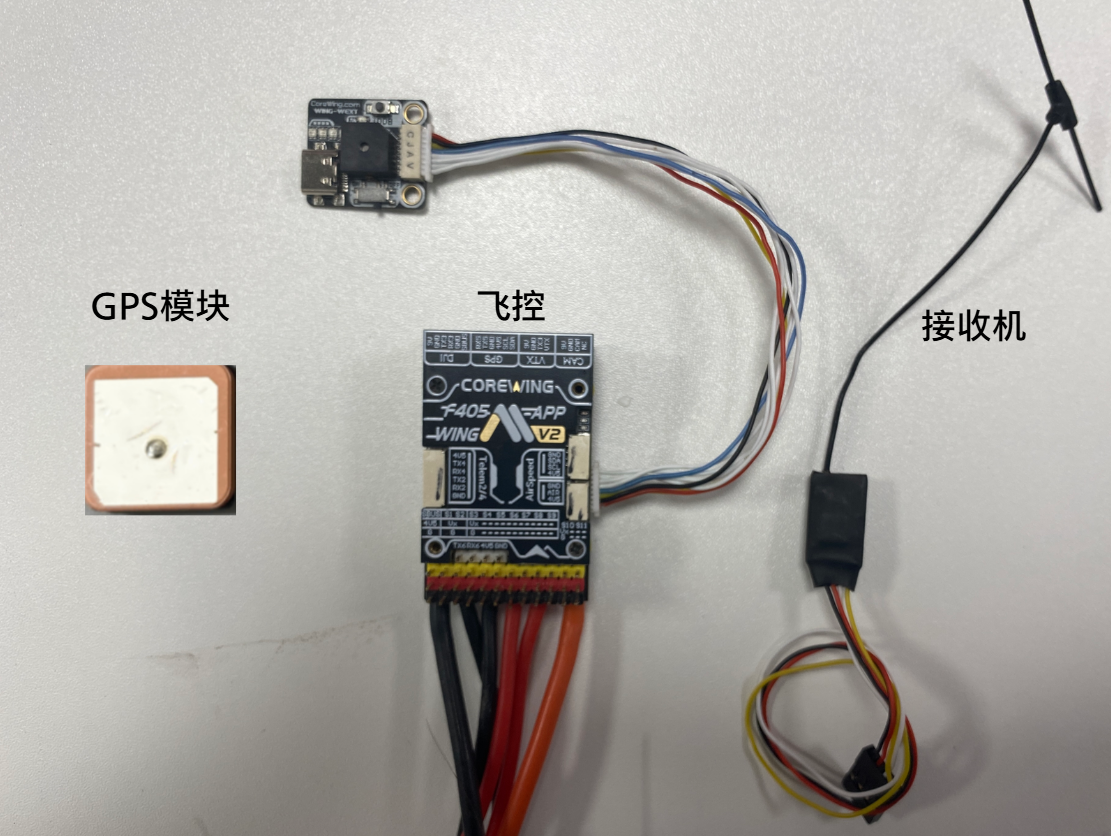
Required Equipment:
1) Flight Controller (FC): CoreWing F405 WING V2/ SpeedyBee F405 WING APP/ SpeedyBee F405 WING MINI Any of these flight controllers are suitable for this tutorial.
2) RC Transmitter: Using RadioMaster Boxer /RadioMaster TX16S as an example.
3) Receiver: Using SpeedyBee ELRS Nano 2.4G RX as an example.
4) GPS Module: Using Beizheng BZ-251 GPS module as an example.
5) Motors: Using 2306 KV1250 motors, suitable for Zhonghangdian ALTUS VTOL, for reference only.
6) ESCs: Using 45A ESCs, suitable for Zhonghangdian ALTUS VTOL, for reference only.
7) Servos: Using 9g metal digital servos, suitable for Zhonghangdian ALTUS VTOL, for reference only.
8) Battery: Using 4S1P 4000mah 21700 battery, suitable for Zhonghangdian ALTUS VTOL, for reference only.
9) Propellers: Using 7-inch three-blade propellers, suitable for Zhonghangdian ALTUS VTOL, for reference only.
Optional Equipment:
1) Analog VTX: Using SpeedyBee TX 1600 VTX and RunCam Phoenix2 SE V2 camera as an example.
2) HD VTX: Using DJI O4 AIR UNIT VTX as an example.
3) Airspeed Sensor: Digital airspeed sensor is recommended.

Important
For ground control station (GCS) installation, refer to: https://docs.corewing.com/plane/software/apsoftware/mp-version-install.html
Introduction to common functions and pages of Mission Planner: https://docs.corewing.com/plane/software/apsoftware/common-functions.html
How to update flight controller firmware - using MissionPlanner ground control station: https://docs.corewing.com/plane/beforetuning/mp-fw-update.html
How to update flight controller firmware - using INAV ground control station: https://docs.corewing.com/plane/beforetuning/inav-fw-update.html
III. Initial Setup
3.1 Accelerometer Calibration
Important
Note: When calibrating the accelerometer, be sure to remove the flight controller from the aircraft and place it on a flat surface for calibration to improve accuracy and ensure stable flight!
- Connect the flight controller to the ground control station using a USB cable.
- Click Initial Setup.
- Click Accelerometer Calibration.
- Click Calibrate Accelerometer.
Important
After completing the operation, disconnect the ground control station and all power to the flight controller, then reconnect the ground control station.

Important
During use, if there are significant temperature or climate changes, the gyroscope has suffered a severe impact, or sensors have been replaced, the accelerometer needs to be recalibrated!
Important
Detailed accelerometer calibration operation: https://docs.corewing.com/plane/ardupilot/settings/fc/accel-calibration.html
3.2 VTOL Parameter Pre-tuning
Enable VTOL Parameters:
- Go to the Config/Tuning page.
- Go to the All Parameters table.
- Search for
Q_ENABLE. - Set the value of
Q_ENABLEto 1.

Important
Restart the flight controller after writing parameters!!!
Modify Aircraft Type:
- Go to the Config/Tuning page.
- Go to the All Parameters table.
- Search for
Q_FRAME. - Set the value of
Q_FRAME_CLASSto 7, andQ_FRAME_TYPEto 1.
| Parameter | Value | Description |
|---|---|---|
| Q_FRAME_CLASS | 7 | Tricopter (Tri), suitable for aircraft with three VTOL motors. |
| Q_FRAME_TYPE | 1 | X configuration |

Enable Tilt Parameters
- Go to the Config/Tuning page.
- Go to the All Parameters table.
- Search for
Q_TILT_ENABLE. - Set the value of
Q_TILT_ENABLEto 1.

Important
Restart the flight controller after writing parameters!!!
Configure Tilt Parameters
- Go to the Config/Tuning page.
- Go to the All Parameters table.
- Search for
Q_TILT. - Set the value of
Q_TILT_TYPEto 2, andQ_TILT_MASKto 3.
| Parameter | Value | Description |
|---|---|---|
| Q_TILT_TYPE | 2 | 0: Off 1: Single tilt 2: Vector control tilt Change to 2 |
| Q_TILT_MASK | 3 | Motors for tilting, special code format Change to 3 |

3.3 Transmitter Setup and Flight Mode Configuration
Important
Navigate to the MDL/MIXES page and check if the transmitter CH1-CH4 are set as follows. If not, modify the transmitter mixing.

3.3.1 Arm Channel Setup
1. Transmitter Setup
- Select a two-position switch
- Navigate to the MDL/MIXES page and configure its mixing as
CH5

2. Ground Control Station Setup
- Go to Config/Tuning
- Go to All Parameters table
- Search for
RC5_OPTION - Set the value of
RC5_OPTIONto153 - Click Write Parameters

Important
How to set arming and disarming: https://docs.corewing.com/plane/ardupilot/settings/fc/arming-disarm-setup.html
3.3.2 Return-to-Home Channel Setup
1. Transmitter Setup
- Select a two-position switch
- Navigate to the MDL/MIXES page and configure its mixing as CH6 (for reference only)

2. Enable Return-to-Home Switch Setup
- Go to Config/Tuning
- Go to All Parameters table
- Search for
RC6_OPTION - Set the value of
RC6_OPTIONto 4 - Click Write Parameters

3.3.3 Flight Mode Setup
1. Transmitter Setup
- Select a three-position switch, set as three-position flight mode switch
- Navigate to the MDL/MIXES page and configure its mixing as
CH8

2. Ground Control Station Setup
Flight Mode Channel Setup:
- Go to Config/Tuning
- Go to All Parameters table
- Search for
FLTMODE_CH - Set the value of
FLTMODE_CHto 8 - Click Write Parameters

Important
[How to set six-position flight mode switch:](https://docs.corewing.com/plane/ardupilot-tuning-guide/common-firmware-settings/transmitter-and-receiver-settings/
how-to-set-a-six-position-switch-for-flight-modes-in-edgetx-system.html) https://docs.corewing.com/plane/ardupilot/settings/rc/sixpos-switch.html
Flight Mode Setup:
- Go to Initial Setup
- Go to Flight Modes
- Set the flight modes according to the diagram
- Click Save Modes

Important
Flight Mode Introduction: https://docs.corewing.com/plane/ardupilot/settings/fc/flight-modes.html
3.3.4 Transmitter Calibration
Important
- Please bind the transmitter to the receiver
How to bind an ELRS receiver to the transmitter: https://docs.corewing.com/plane/ardupilot/settings/rc/elrs-bind.html
- Go to Initial Setup.
- Go to Transmitter Calibration.
- Click Calibrate Transmitter.
- Note: Check the PITCH reverse option.

Important
Detailed transmitter calibration process: https://docs.corewing.com/plane/ardupilot/settings/fc/calibration.html
IV. Equipment Installation
4.1 Flight Controller Wiring
- Power Wiring
Important
Note:
The positive power terminal must be connected to the designated pad.
ESC refers to the Electronic Speed Controller.
When soldering, ensure there are no cold joints.

4.2 Flight Controller Installation
The flight controller should be installed at the center of gravity of the aircraft and the center position of the three motors, refer to the diagram below:

Important
If you need to adjust the installation orientation of the flight controller: https://docs.corewing.com/plane/ardupilot/settings/fc/orientation-setup.html
4.3 Peripheral Installation and Setup
Peripheral Wiring

4.3.1 Receiver Installation and Setup
Install as shown in the figure, route the antenna outside the airframe and secure it with tape:

4.3.2 Servo Output Settings (Servo and Motor Setup) and Surface Control Check
Important
The flight controller has its own BEC. If the ESC also has a BEC, you must remove the middle power wire and insulate it to prevent it from contacting a conductor during flight, which could cause a short circuit.
Output Wiring:
Parameter Settings:
Important
The AP firmware references the multirotor Y-3 motor definition. Note that the front left motor is MOTOR 2, the front right motor is MOTOR 1, and the rear motor is MOTOR 4.

- Enter initial setup
- Enter Servo Output
- Set output
| Channel | Output | Description |
|---|---|---|
| S1 | Aileron | Left aileron |
| S2 | Aileron | Right aileron |
| S3 | VTailLeft | Left V-tail servo |
| S4 | VTailRight | Right V-tail servo |
| S5 | Motor2 | Front left motor |
| S6 | Motor1 | Front right motor |
| S7 | Motor4 | Rear motor |
| S8 | TiltMotorFrontLeft | Left tilt servo |
| S9 | TiltMotorFrontRight | Right tilt servo |

Important
Note:
The minimum and mid-point values for the throttle should be consistent. When the output is changed in the ground control station, the throttle mid-point value may not be updated automatically, so please check it carefully.
Output settings should be configured according to timer grouping as much as possible. Refer to the flight controller manual " **Part5-Pin Mapping-**ArduPilot Pin Mapping " section.
Tilt Servo Check:
Important
Switch the flight mode to QSTABILIZE and connect the battery power supply;
In VTOL mode, the tilt servos should be at 90 degrees vertical, as shown:
Important
When one servo is vertical and the other is horizontal, simply check Reverse for the channel corresponding to the incorrect tilt servo.

Important
1. Adjust according to the actual situation. Not every aircraft will have the left tilt servo PWM value at a low position in multirotor mode.
2. Precisely control the servo position or angle by adjusting the maximum and minimum duty cycle values of the PWM signal in different modes.
3. When adjusting min/max values, the ground control station may display a warning about exceeding limits. Click OK to proceed.
If not, adjust the min value for channel 8 and the max value for channel 9, as shown:
Important
Switch the flight mode to Manual;
In fixed-wing mode, the tilt servos should be 180 degrees horizontal, as shown below:
If not, adjust the max value for channel 8 and the min value for channel 9, as shown:
Surface Control Check:
a. In stabilize mode, surface control feedback check
Important
Switch the flight mode to FBWA
- When the aircraft rolls left, the left wing control surface deflects down, and the right wing control surface deflects up.
- When the aircraft rolls right, the left wing control surface deflects up, and the right wing control surface deflects down.
- When the aircraft pitches up, the feedback is both control surfaces deflecting down simultaneously.
- When the aircraft pitches down, the feedback is both control surfaces deflecting up simultaneously.
b. In manual mode, surface control feedback checkImportant
Switch the flight mode to
ACRO
- When the aileron stick is moved left, the feedback is the left wing control surface deflecting up and the right wing control surface deflecting down.
- When the aileron stick is moved right, the feedback is the left wing control surface deflecting down and the right wing control surface deflecting up.
- When the elevator stick is moved up, the feedback is both control surfaces deflecting down simultaneously.
- When the elevator stick is moved down, the feedback is both control surfaces deflecting up simultaneously.
- When the rudder stick is moved left, the feedback is both control surfaces deflecting left simultaneously.
- When the rudder stick is moved right, the feedback is both control surfaces deflecting right simultaneously.
Check stabilize mode feedback first, then check manual mode feedback. If stabilize mode feedback is incorrect, check Reverse for the incorrect surface control channel.
Important
In stabilize mode, if the rudder control on the RC transmitter is correct, then the rudder feedback in stabilize mode must also be correct. If stabilize mode feedback is incorrect, please check the rudder feedback from RC transmitter control.
Important
For detailed information on how to confirm if surface control feedback is correct, refer to: https://docs.corewing.com/plane/ardupilot/settings/fc/dir-check.html
4.3.3 GPS Module Installation
Install as shown in the figure. Secure the module to the bottom with 3M adhesive ensure the module is installed securely, otherwise it will significantly affect flight performance:
Important
- Install away from metal components, such as magnetic compartment covers, metal pull rods, etc., as this will interfere with the compass.
- Install away from the receiver, servo wires, motors, and other equipment, as this will interfere with the compass.
- Confirm that the installation is secure.
- For detailed installation procedures for different modules, please refer to their respective manuals.
4.3.4 Video Transmitter Installation and Setup
- Analog Video Transmitter Installation:

- Analog Video Transmitter Parameter Settings:


Important
Analog video transmitter parameter settings: https://docs.corewing.com/plane/ardupilot/settings/vtx/analog-vtx/config.html
- HD Video Transmitter Installation:

- HD Video Transmitter Parameter Settings:


Important
HD video transmitter parameter settings: https://docs.corewing.com/plane/ardupilot/settings/vtx/hd-vtx/config.html
OSD Settings:
- OSD configuration file: osd.param.
- Enter Configuration/Debugging.
- Enter All Parameters Table.
- Click Load.
- Select the osd parameter file.
- Click Open.
- Click Write Parameters.

- OSD display effect as follows:

Important
How to set up OSD elements: https://docs.corewing.com/plane/ardupilot/settings/fc/osd.html
:::
4.3.5 Airspeed Sensor Installation and Setup
Airspeed sensor installation location reference:
Important
Airspeed sensor installation, parameter settings, and calibration: https://docs.corewing.com/plane/ardupilot/settings/airspeed/airspeed-setup.html
Five, Pre-flight Debugging
5.1 VTOL Parameter Settings
Important
The following parameters are based on firmware version 4.5.7. Parameters may vary with different firmware versions.
Tilt-related Parameters:
| Parameter | Value | Description |
|---|---|---|
| Q_TILT_YAW_ANGLE | 10 | Vector angle for multirotor mode, 10=10 degrees. Maximum tilt angle of the motor when applying rudder input. Generally set to avoid propellers hitting the fuselage. |
| Q_TILT_FIX_ANGLE | 10 | Vector angle for fixed-wing mode, 10=10 degrees. When enabled, tilt servos participate in vector control when applying aileron and elevator inputs. |
| Q_TILT_FIX_GAIN | 0.6 | Fixed-wing vector sensitivity, 0=Off, 0.6=60%, 1=100% |
| Q_TILT_MAX | 70 | Tilt servo waits for airspeed at this angle=70 degrees |
| Q_TILT_RATE_DN | 25 | Angular velocity for tilting down when transitioning from multirotor to fixed-wing, 25 degrees per second |
| Q_TILT_RATE_UP | 80 | Angular velocity for tilting up when transitioning from fixed-wing to multirotor, 80 degrees per second |
Transition-related Parameters:
| Parameter | Value | Description |
|---|---|---|
| Q_ASSIST_ANGLE | 65 | Multirotor assistance will activate when exceeding this angle (part of stall protection. Aircraft will automatically switch to multirotor if angle is too high). |
| Q_ASSIST_SPEED | 9-10 | Multirotor assistance will activate when speed is below this value (set to minimum airspeed+1 T-1. Usually set to 10. Part of stall protection. Aircraft will switch to multirotor if speed is too low). |
| Q_TRANSITION_MS | 2000 | Time for multirotor assistance after switching to airplane mode, 1k=1 second, or maximum deceleration time when switching back to multirotor. |
| Q_TRAN_PIT_MAX | 5 | Allowed horizontal oscillation angle during transition (unit: degrees). Smaller values result in smoother transitions but require higher performance from tilt servos and motors). |
| Q_TRANS_DECEL | 3 | Deceleration rate in M/s to prevent excessive speed when switching back to multirotor. Too high a speed when switching to multirotor hover mode can cause the aircraft to break apart. |
Multirotor-related Parameters:
Important
Modify according to your aircraft's actual configuration:
| Parameter | Value | Description |
|---|---|---|
| Q_PILOT_ACCEL_Z | 2.5 | Vertical acceleration, default 2.5 m/s. For smaller aircraft, use a lower value. |
| Q_PILOT_SPD_DN | 0 | Maximum vertical speed during descent, in m/s. If set to 0, Q_PILOT_SPD_UP value will be used. |
| Q_PILOT_SPD_UP | 2.5 | Maximum climb speed during ascent, in m/s. |
| Q_ANGLE_MAX | 3500 | Maximum tilt angle in multirotor mode, default 3000=30 degrees. For smaller aircraft, a higher value can be used to counter headwind. |
| Q_LOIT_BRK_DELAY | 1 | Braking delay time after transitioning from fixed-wing to tilt, in seconds. Too short can be startling, too long increases braking distance. |
| Q_M_SPIN_MAX | 1 | Maximum throttle in multirotor mode, 1=100%. For smaller aircraft that don't consume much power, a higher value can be used. |
| Q_M_SPIN_MIN | 0.15 | Idle throttle in multirotor mode, 0.15=15% |
| Q_VFWD_GAIN | 0.05 | Use tilt servos to accelerate or counter strong wind in multirotor QLoiter mode, default 0=Off, 0.05=On. |
| Q_VFWD_ALT | 2 | Disable tilt boost assistance below this altitude. Cannot switch to fixed-wing below this height. |
| Q_WP_SPEED_DN | 150 | Maximum descent rate during missions, in cm/s. |
| Q_WP_SPEED_UP | 200 | Maximum climb rate during missions, in cm/s. |
| Q_M_SLEW_DN_TIME | 0 | Limits throttle deceleration rate. Usually 0. Add some if power response is too aggressive. |
| Q_M_SLEW_UP_TIME | 0 | Limits throttle acceleration rate. Usually 0. Add some if power response is too aggressive. |
| INITIAL_MODE | 17 | Flight controller starts in QSTABLIZE mode on power-up to prevent fixed-wing mode activation on ground with propellers attached. |
| Q_OPTION | 1024 | Enable motor tilt for yaw control during arming, applicable for aircraft that tend to spin. |
VTOL Return-to-Home Parameters:
| Parameter | Value | Description |
|---|---|---|
| Q_WP_SPEED_DN | 150 | First stage landing speed, in cm/s |
| Q_LAND_FINAL_SPD | 0.5 | Second stage landing speed, in m/s |
| Q_LAND_FINAL_ALT | 3 | Second stage landing height, in meters |
| Q_RTL_ALT | 100 | Multirotor return-to-home altitude, in meters (consider obstacles at current altitude) |
| Q_RTL_MODE | 2 | Enable hybrid return-to-home mode (=2) |
| RTL_ALTITUDE | -1 | Fixed-wing return-to-home altitude, in meters. If set to -1, maintain current altitude for return. If set to a value, aircraft will slowly climb or descend to that altitude for return. |
Q_RTL_MODE Explanation:
Q_RTL_MODE = 2 ✅ Recommended
Important
Meaning: The aircraft will fly to the return point at the altitude set by RTL_ALTITUDE, then perform a spiral descent around the radius specified by Q_FW_LND_APR_RAD (default is 0, if 0 then use WP_LOITER_RAD, recommended setting is 50~60m), until descending to the altitude specified by Q_RTL_ALT, then switch to QRTL mode for landing.
Advantages:
- Aircraft maintains cruise state during return, reducing multirotor flight time;
- Gradual spiral descent in fixed-wing mode before landing
6. Flight Test
6.1 Pre-flight Check Parameter Settings
- Enter Configuration/Tuning.
- Enter All Parameters Table.
- Search for
ARMING_CHECK. - Set the required Unlock Pre-flight Check Items.

Important
How to set unlock pre-flight check parameters: https://docs.corewing.com/plane/ardupilot/settings/fc/prearm-check-setup.html
6.2 Pre-flight Inspection
6.2.1 Center of Gravity Check
1. Reference Aircraft Markings:
- Many flying wing or fixed-wing aircraft have recommended center of gravity positions marked on the fuselage, typically at 25-30% of the chord length from the leading edge of the main wing.

2. Finger Support Method: - Place the aircraft on two fingers at the recommended center of gravity point under the main wing and gently balance the fuselage.
- If the nose is too heavy or tail is too heavy, adjust the battery or add ballast.
Nose Heavy (Center of Gravity Too Far Forward): - The aircraft will have difficulty pulling up during flight, which may lead to a crash.
- Try moving the battery rearward or reducing nose ballast.
Tail Heavy (Center of Gravity Too Far Back): - The aircraft is prone to stalling on the upstroke.
- Solution: Move the battery forward or add nose ballast.
6.2.2 Pre-flight Control Surface Check
Important
Switch flight mode to ACRO
- When the aileron stick is moved left, the response should be the left wing control surface moving up and the right wing control surface moving down.
- When the aileron stick is moved right, the response should be the left wing control surface moving down and the right wing control surface moving up.
- When the elevator stick is moved up, the response should be both V-tail control surfaces moving down simultaneously.
- When the elevator stick is moved down, the response should be both V-tail control surfaces moving up simultaneously.
- When the rudder stick is moved left, the response should be both V-tail control surfaces moving left simultaneously.
- When the rudder stick is moved right, the response should be both V-tail control surfaces moving right simultaneously.
Important
Switch flight mode to
FBWA
- When the aircraft rolls left, the left wing control surface moves down and the right wing control surface moves up.
- When the aircraft rolls right, the left wing control surface moves up and the right wing control surface moves down.
- When the aircraft pitches up, the response should be both V-tail control surfaces moving down simultaneously.
- When the aircraft pitches down, the response should be both V-tail control surfaces moving up simultaneously.
Important
In self-stabilization mode, if the rudder control on the transmitter is correct, the self-stabilization rudder response must also be correct. If the self-stabilization response is incorrect, please check the rudder response on the transmitter.
6.2.3 Satellite Number Check
Important
Outdoors, check if the satellite count is greater than 8. Greater than 8 satellites are required for takeoff!
If the satellite count consistently remains below 8, move to an open area. If there is no improvement, replace the GPS module.

6.2.4 Wind Direction Confirmation
- Observe wind direction:
- Observe wind indicators such as smoke, windsocks.
- Throw light objects (like grass leaves) into the air and observe their drift direction.
- Determine upwind takeoff direction:
- Upwind takeoff provides greater lift and reduces takeoff speed requirements.
- Downwind takeoff may cause stalling or the nose being pushed down by the wind, easily leading to a crash.
6.3 Flight Test
6.3.1 VTOL Flight Test
- Set the three flight modes to QSTABILIZE, QHOVER, QLOITER

Important
Note: For multirotor control, visual line-of-sight flight is recommended during testing
- Test procedure: Take off in QSTABILIZE mode → test if control responses are correct → switch to
QHOVER→ hover at mid throttle for one to two minutes → throttle auto-learning → land inQHOVER→ power cycle the flight controller → take off inQSTABILIZEmode → hover with mid throttle control → switch toQLOITER→ test altitude-hold and position-hold hovering → land inQLOITERmode.- Take off with low throttle in
QSTABILIZEmode, test stick responses. If control responses are incorrect, recheck transmitter calibration and channel mixing configuration, ESC and motor checks. - If flight is stable in
QSTABILIZEmode, switch the flight mode toQHOVER, control the throttle stick at 50%, the aircraft will maintain altitude and position hover. - In
QHOVERmode, the flight controller will perform throttle auto-learning. Land inQHOVERmode, disconnect all power and restart the flight controller. After changing the battery, take off again, switch back toQSTABILIZEmode, and control the throttle at 50% to achieve hovering. - Switch to
QLOITER, control the throttle at 50%, test the altitude-hold and position-hold hovering effect. After the aircraft begins hovering, the position and altitude variation should be within a 1-meter radius or smaller.Important
When the flight feel is not good in Q_stabilize mode, you can perform multi-axis automatic tuning through Q_AUTOTUNE mode.
Operation reference: https://ardupilot.org/plane/docs/qautotune-mode.html
Tuning process explanation: https://ardupilot.org/plane/docs/quadplane-vtol-tuning-process.html#quadplane-vtol-tuning-process
- Take off with low throttle in
6.3.2 Fixed-wing Flight Test
Set the three flight modes to ACRO, STABILIZE, AUTOTUNE
Important
Note: For fixed-wing control, FPV perspective flight is recommended
Test procedure: Take off in ACRO mode → switch to STABILIZE to test if the aircraft can fly relatively stably → switch to AUTOTUNE → automatic tuning complete → switch to STABILIZE → feel the aircraft's handling → land and disarm → power cycle the flight controller.
- Take off in
ACROmode, the flight controller will automatically compensate for wind, preventing the aircraft from rolling over due to wind, and ensuring sufficient control surface deflection. - Then switch to
STABILIZEmode, do not operate the transmitter, and observe if the aircraft can fly level for a period. If the aircraft dives or climbs, recalibrate the level to match the aircraft's angle of attack.Important
It is recommended to perform Servo Autotrim to improve level flight experience: https://docs.corewing.com/plane/ardupilot/settings/fc/servo-autotrim.html
- If there are no issues, switch to
AUTOTUNEfor automatic tuning. - If the aircraft attitude changes significantly in
STABILIZEmode, check the tilting servos, control surfaces (inSTABILIZEmode), and level calibration. - After automatic tuning is complete, switch back to
STABILIZEmode, feel the flight handling, then land.Important
Automatic tuning: https://docs.corewing.com/plane/ardupilot/settings/fc/autotune.html
6.3.3 Transition Flight Test
Set the three flight modes to QSTABILIZE, QLOITER, FBWA
Important
Note:
- Confirm that individual VTOL and fixed-wing tests have no issues;
- Before transitioning to fixed-wing, fly the aircraft to a height of more than 20 meters in VTOL mode, then perform the transition. During flight, pay attention to the transition operation method, and during the transition, keep the throttle at mid position.
- Test procedure: Vertical takeoff in QSTABILIZE/QLOITER mode → aircraft reaches altitude → switch to
FBWA→ aircraft transitions to fixed-wing mode (feel the flight after transition) → switch to QSTABILIZE/QLOITER mode → aircraft transitions to VTOL mode (feel the flight after transition) → land.- Take off in
QLOITER, fly to sufficient altitude, then switch toFBWA. At this point, the tilting servos will tilt until the motors are completely horizontal, the aircraft completes the transition from VTOL mode to fixed-wing mode, and begins forward flight. Pay attention to altitude control and feel if the flight after the transition is smooth without any abnormalities. - Airspeed sensor installed: The tilting servos will tilt to a certain angle and wait for airspeed to reach the required value, then the motors will become completely horizontal, transitioning to fixed-wing mode.
- No airspeed sensor: The tilting servos will transition to horizontal state within 2-3 seconds, after which the aircraft will transition to fixed-wing mode and perform a slight dive to increase airspeed, enhance wing lift, and prevent stalling.
- Switch the flight mode from
FBWAback toQLOITER, at which point the tilting motors will quickly transition from horizontal to vertical state. During the transition, the aircraft may glide for a short distance. After returning to VTOL mode, feel if the flight after the transition is smooth without any abnormalities, then land.Important
If the aircraft attitude changes significantly during the transition to fixed-wing mode, switch back to
QSTABILIZEmode. The tilting servos will quickly return to vertical state, land immediately. Perform tilting servo checks, control surface checks (inSTABILIZEmode), and level calibration checks based on the above test content.
- Take off in
Technical Support QR Code
