Sirius ELRS MAVLink Telemetry - ArduPilot Firmware
I. MAVLink Mode Working Principle
1.1 Data Link Architecture
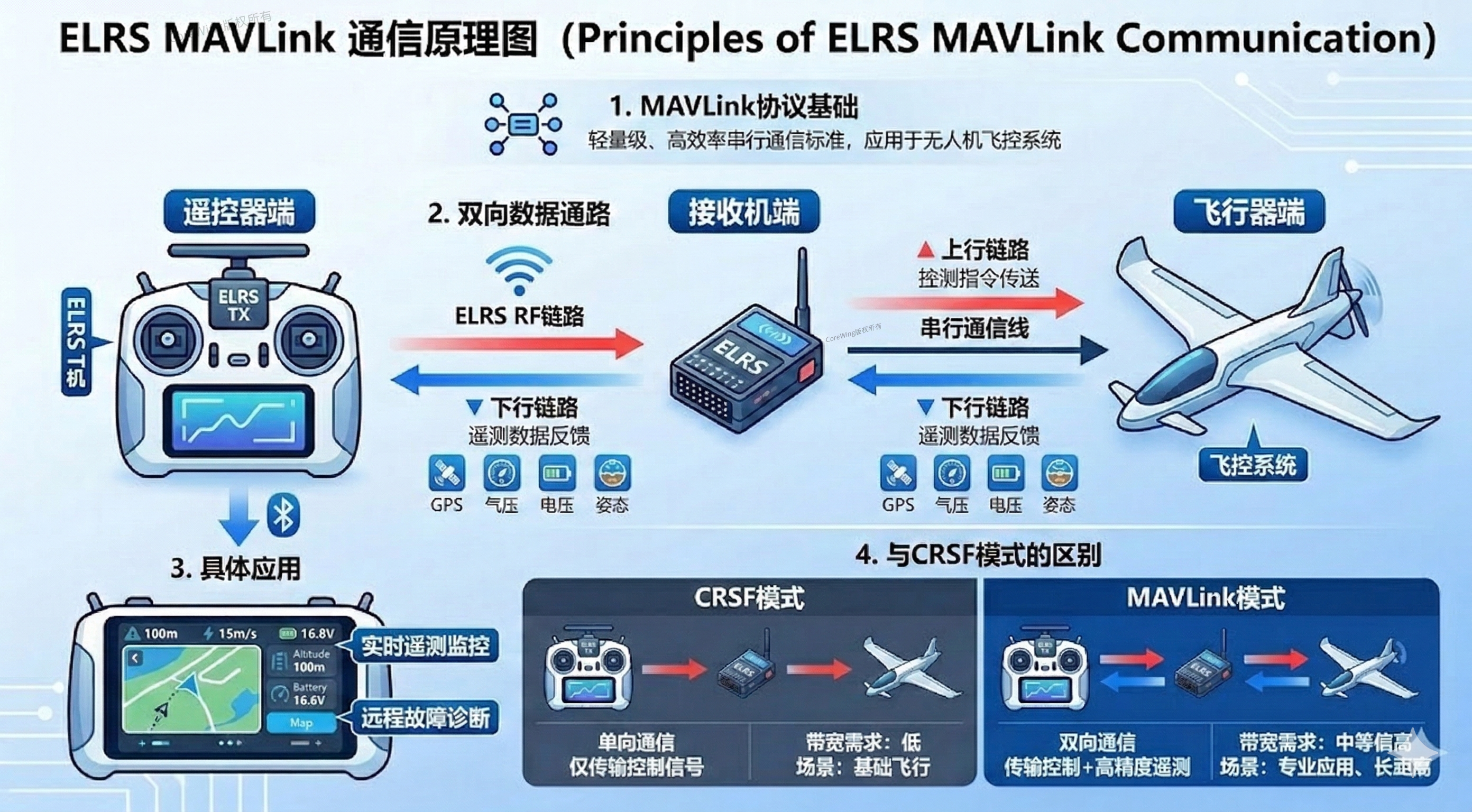
After enabling MAVLink functionality, the system establishes a complete bidirectional communication link:
Downlink (Telemetry): The aircraft sends data such as GPS position, barometric altitude, battery voltage, and attitude angles back to the RC transmitter through the receiver.
Uplink (Control): The channel commands from the RC transmitter are sent to the aircraft through the receiver.
1.2 MAVLink vs CRSF Mode Comparison
| Feature | CRSF Mode | MAVLink Mode |
|---|---|---|
| Communication Direction | Unidirectional (Transmitter → Aircraft) | Bidirectional (Transmitter ↔ Aircraft) |
| Transmission Content | Control signals + limited telemetry | Control signals + telemetry data |
| Bandwidth Requirements | Low | Medium to High |
| Typical Applications | Basic flight control | Long-range flight, mission planning, real-time monitoring |
1.3 Practical Application Scenarios
- Real-time Monitoring: RC transmitter screen displays aircraft position, altitude, battery level, speed, and other critical data
- Remote Diagnostics: Analyze aircraft status through telemetry data to quickly locate faults
- Ground Station Connection: Use with ground control stations like MissionPlanner for mission planning and flight monitoring
II. Equipment List
2.1 Flight Controller
- CoreWing F405 WING V2
2.2 Wireless Communication Modules
- Transmitter: Sirius 2.4G ELRS
- Receiver: SkyGuy Nano 2G4 RX
2.3 RC Transmitter
- Recommended: RadioMaster TX16S
- Compatible: Other RC transmitters supporting CRSF protocol
III. RC Transmitter Basic Settings
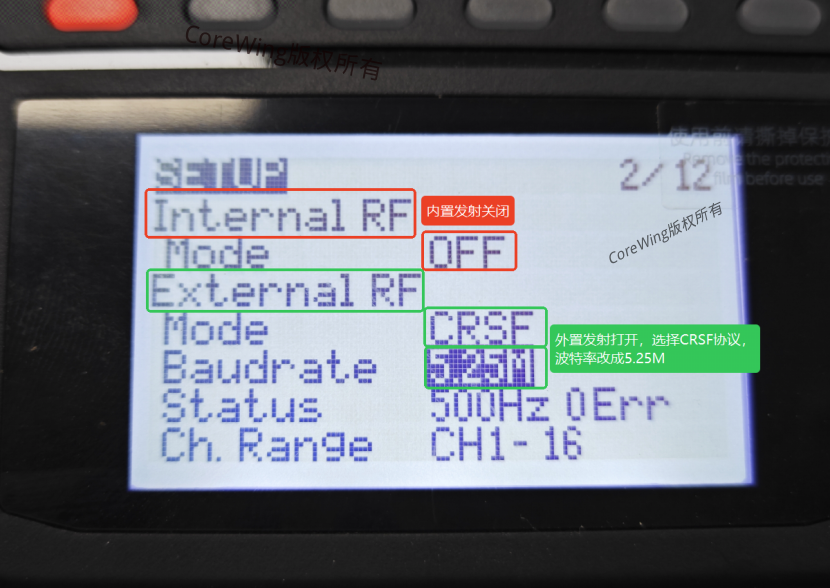
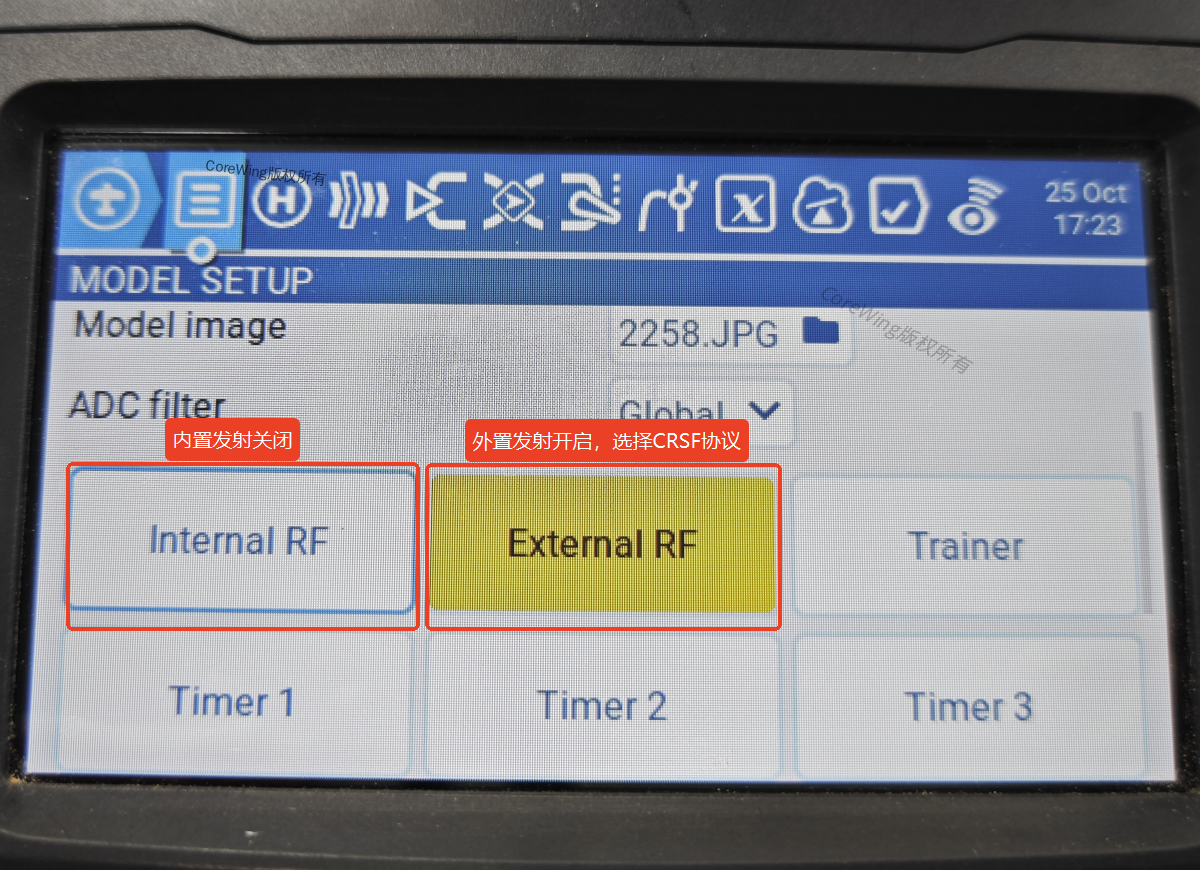
3.1 Enable External Transmitter
- Enter the model settings menu and find the "SETUP" page
- Turn off "Internal RF Mode"
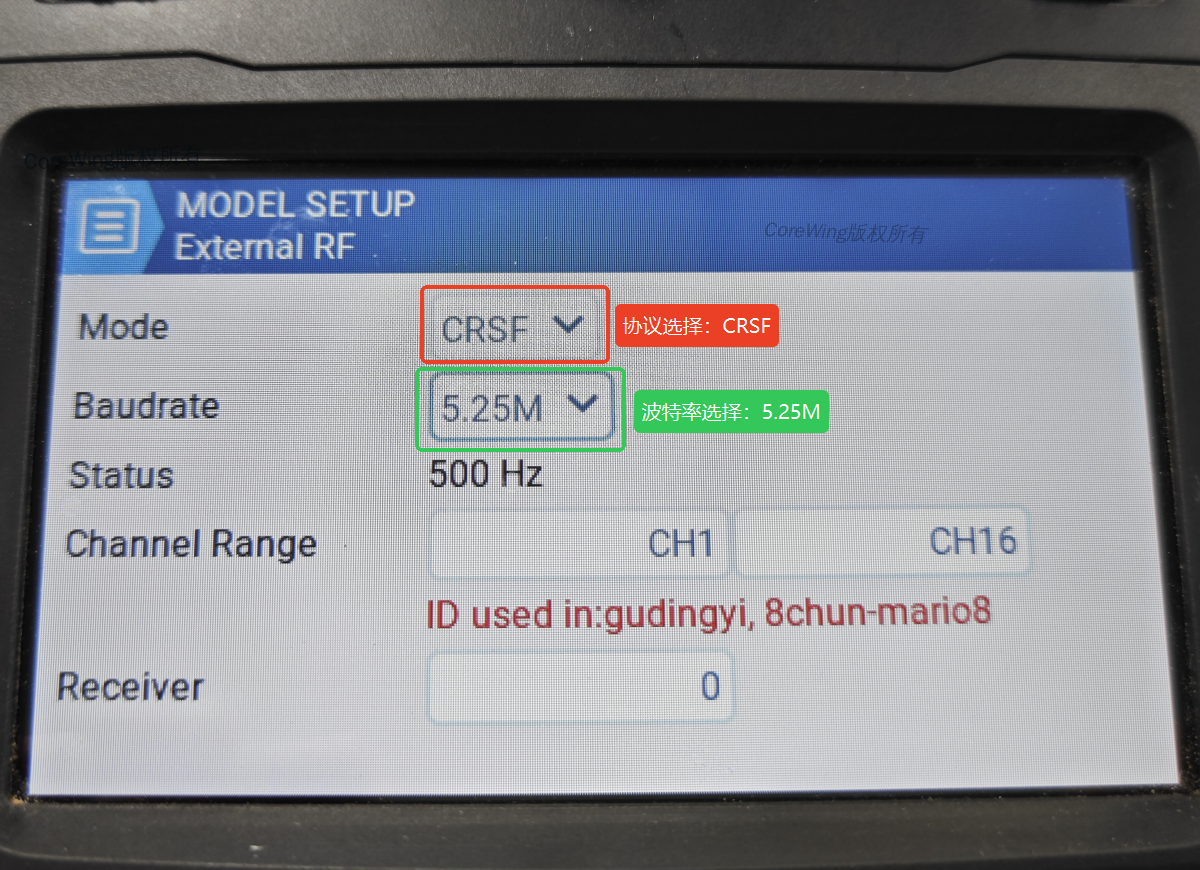
- Turn on "External RF Mode"
- Set "Mode" to
CRSFand "Baudrate" to5.25M
Important
Why set "Baudrate" to 5.25M?
If set to 400k, it may not be possible to enter the ExpressLRS Lua script;
If set to 1.87M, it may not be possible to set Packet Rate to F1000.
3.2 Settings Reference
Black and White Screen Transmitter:
Color Screen Transmitter:
3.3 Transmitter and Receiver Binding
Important
For transmitter and receiver binding tutorial, refer to: How to bind ELRS Transmitter/Transmitter with Receiver
IV. Firmware Upgrade
Important Note
Before using MAVLink mode, the following firmware must be upgraded to the specified versions:
Transmitter Firmware: ≥ 3.5.6 (factory firmware)
Receiver Firmware: ≥ 3.5.6 (factory firmware)
Backpack Firmware: ≥ CW 1.5.4 (CoreWing customized version)
The above firmware can be upgraded through the CoreWing APP.
For information on how to update the ELRS firmware of the Sirius transmitter and SkyGuy receiver using the CoreWing APP, please refer to the following article:
V. MAVLink Mode Parameter Configuration
Note
When configuring transmitter parameters, ensure the receiver is powered off to avoid configuration issues.
5.1 Transmitter Parameter Settings
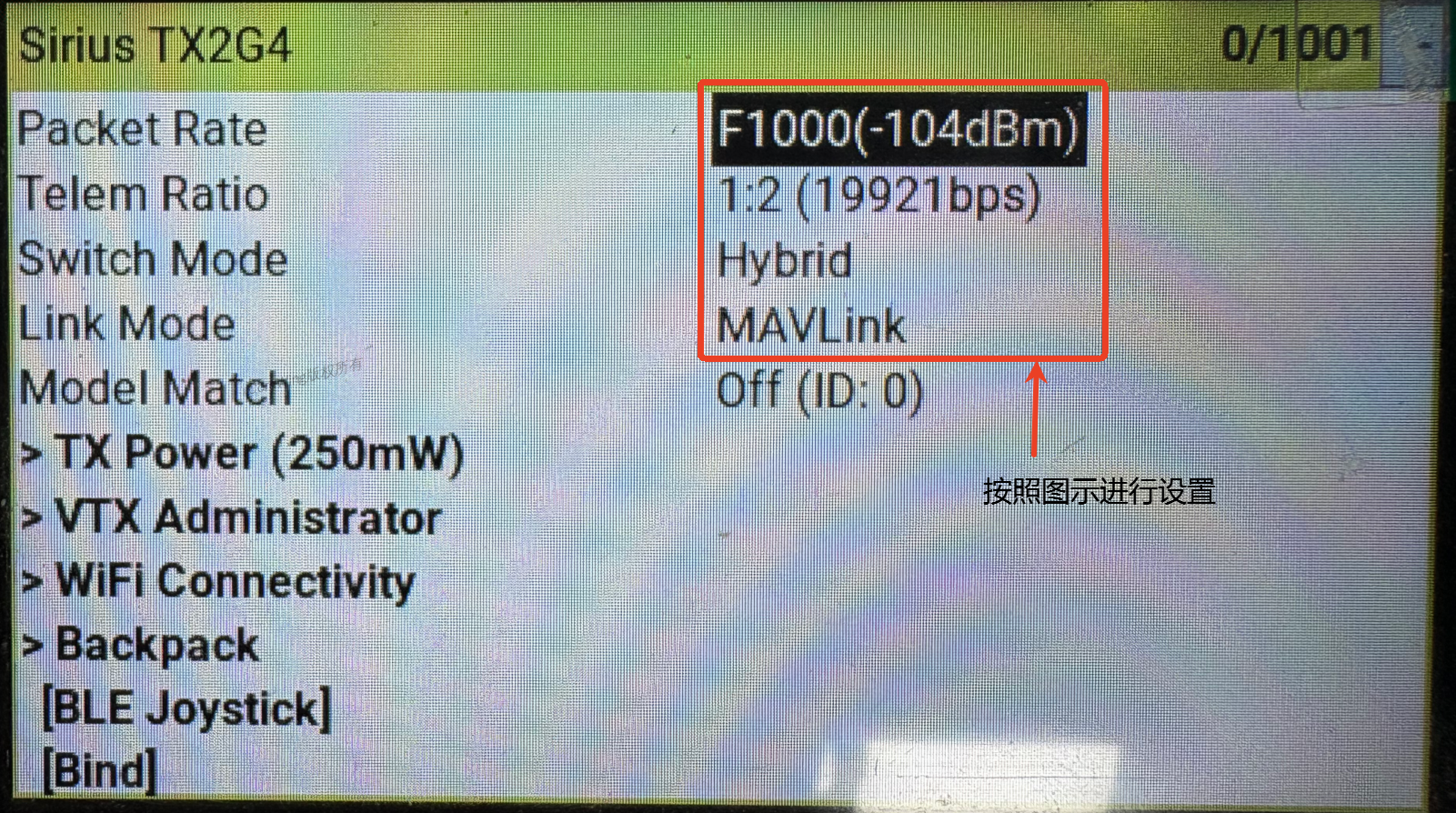
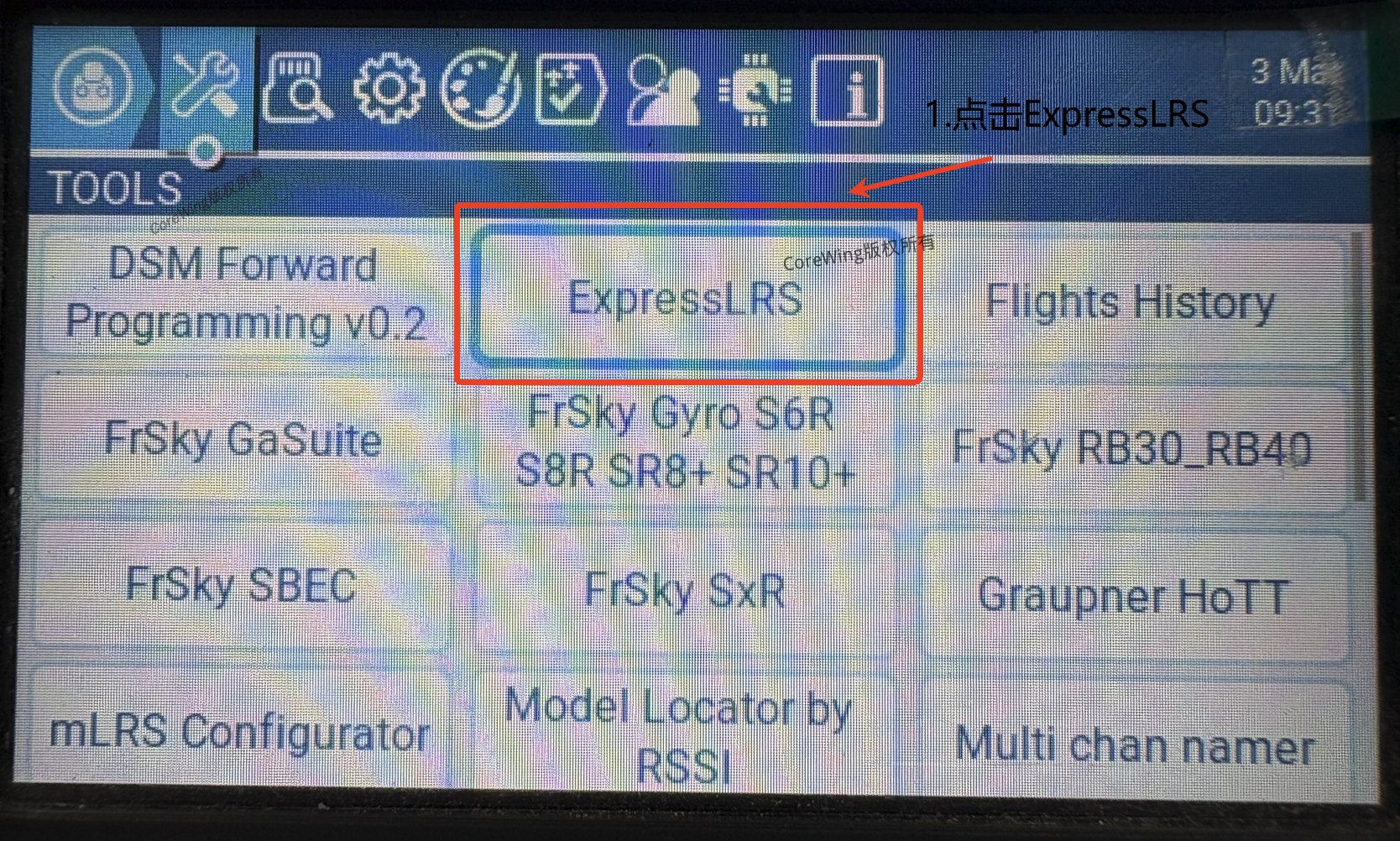
In the RC transmitter ExpressLRS script page, configure according to the following table:
| Configuration Item | Setting Value | Description |
|---|---|---|
| Data Rate | F1000 | Frequency 1000Hz, sensitivity -104dBm |
| Telemetry Ratio | 1:2 | Ratio mode, rate 19921bps |
| Mode Switch | Hybrid | Hybrid mode |
| Link Mode | MAVLink | Telemetry protocol |
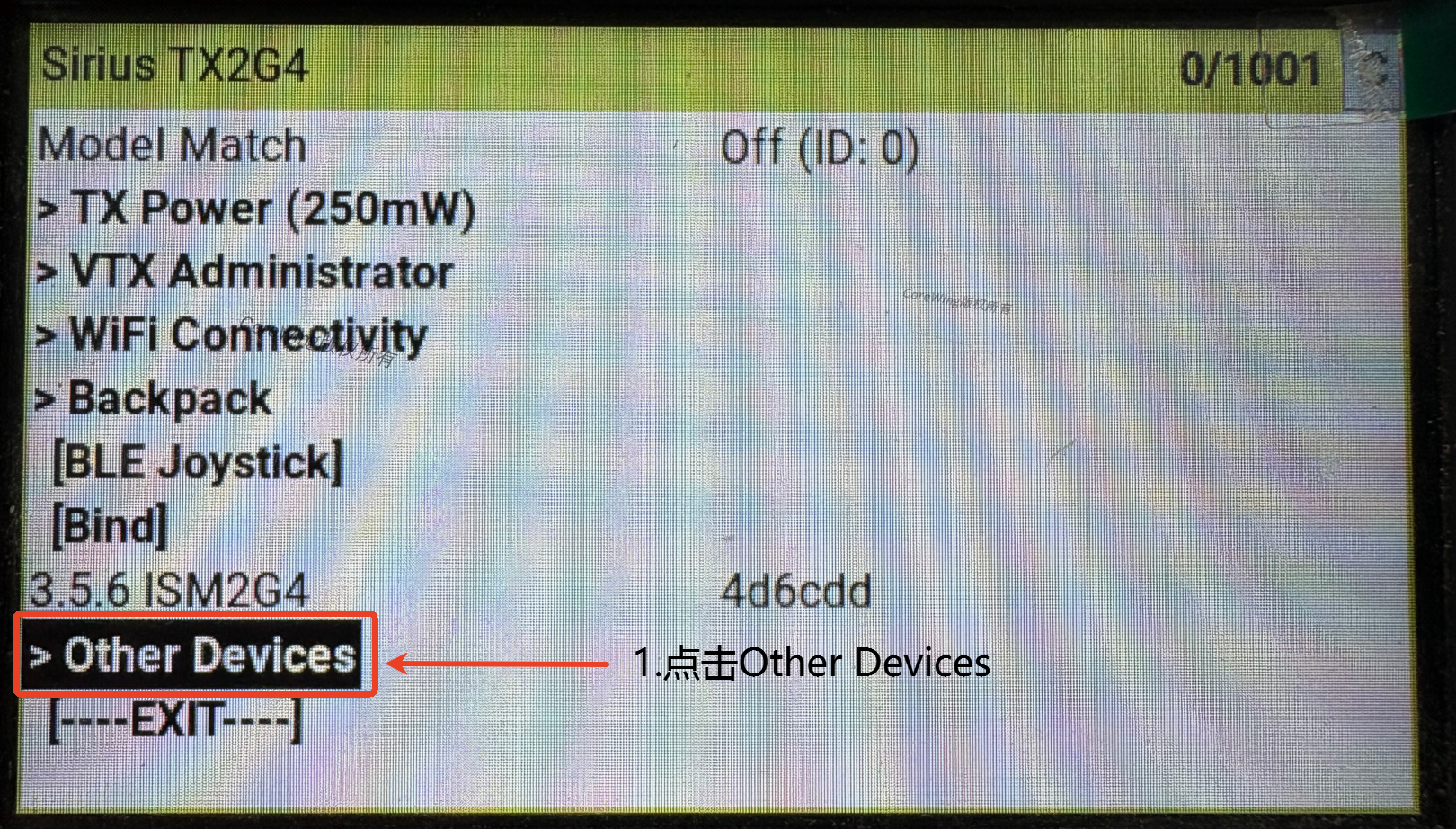
5.2 Receiver Parameter Settings
- RC transmitter enters ExpressLRS script → Select Other Devices
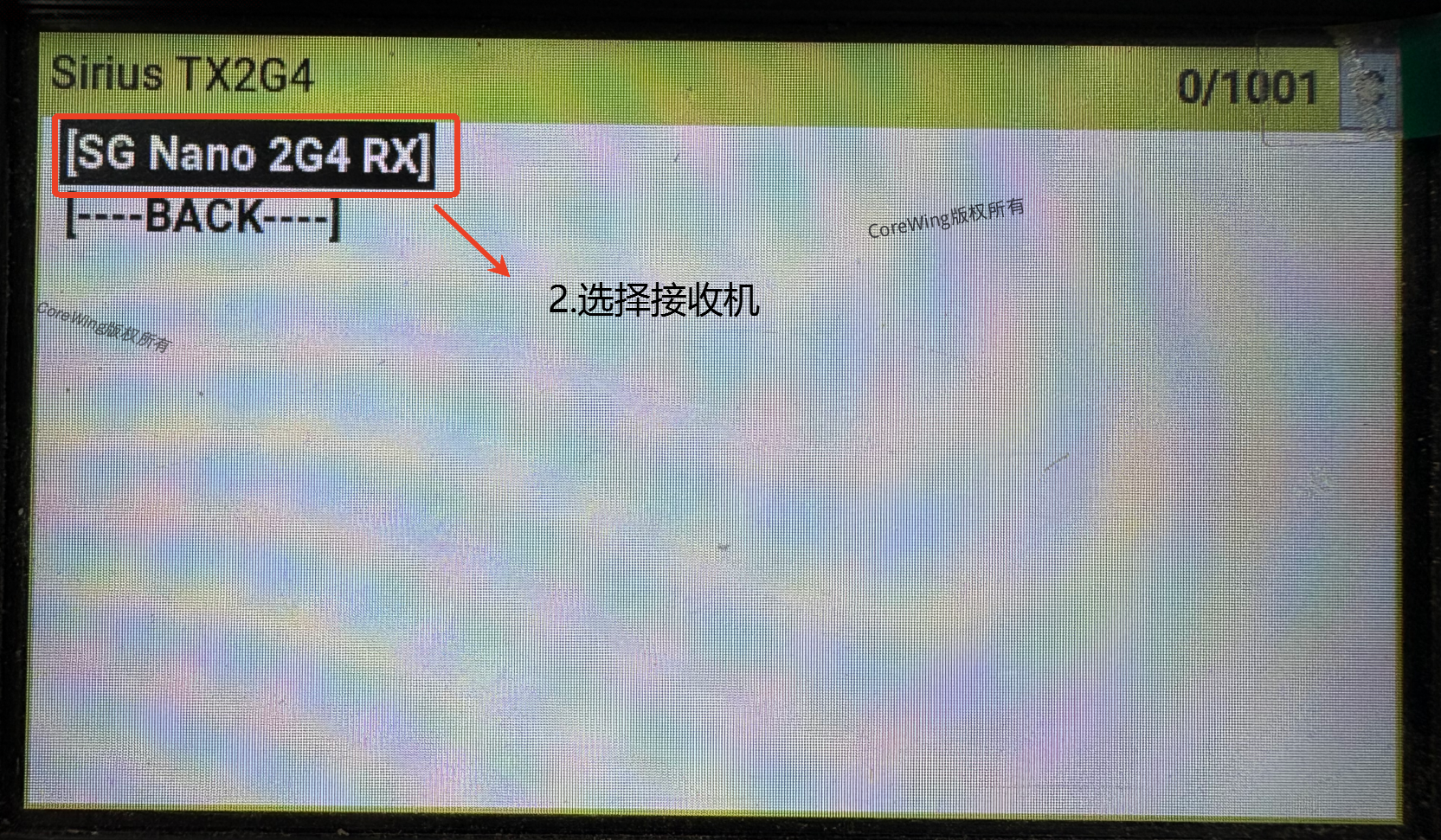
- Select SG Nano 2G4 RX receiver
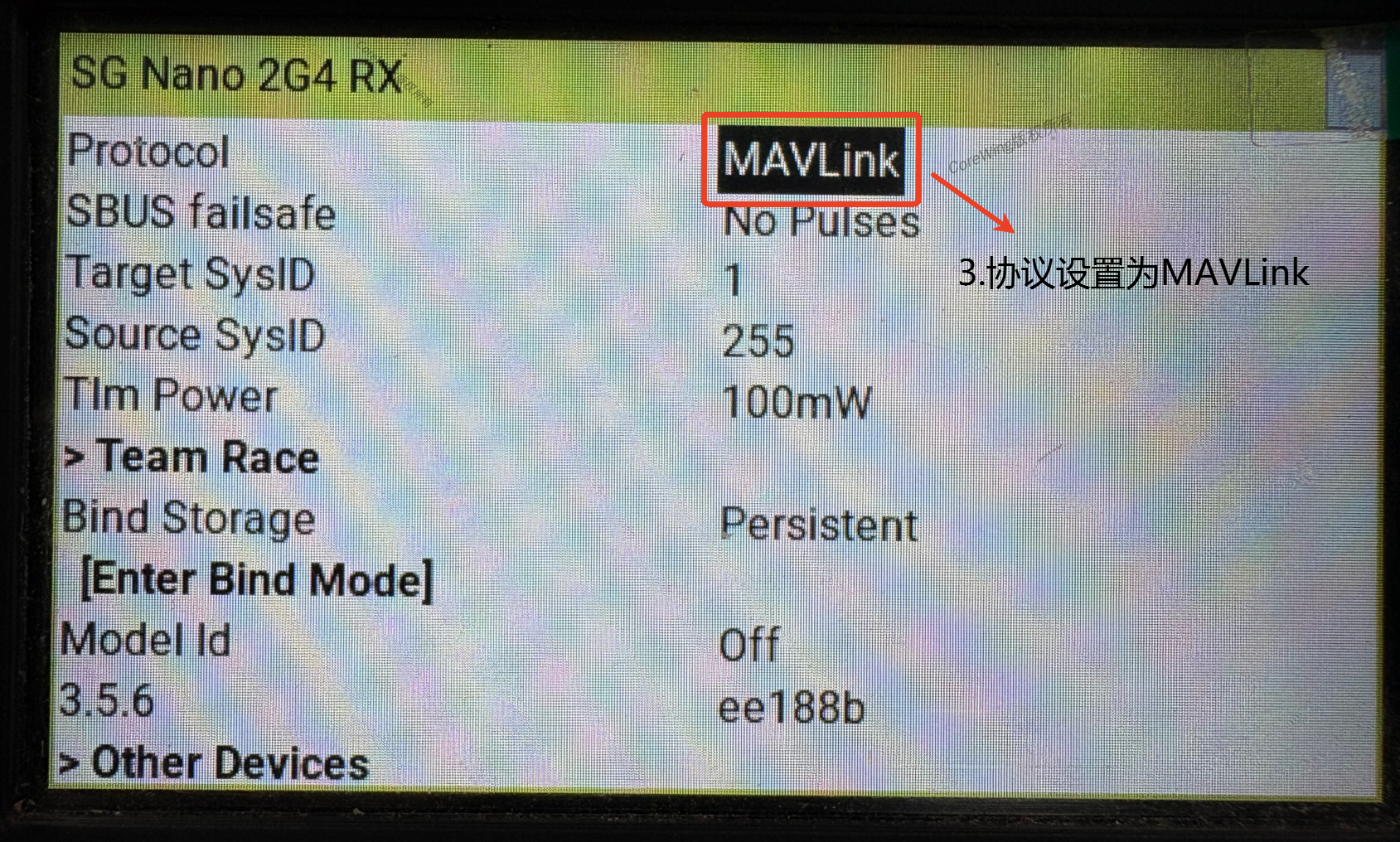
- Set the receiver protocol to
MAVLINK, keep other parameters at default
6. Flight Controller Configuration
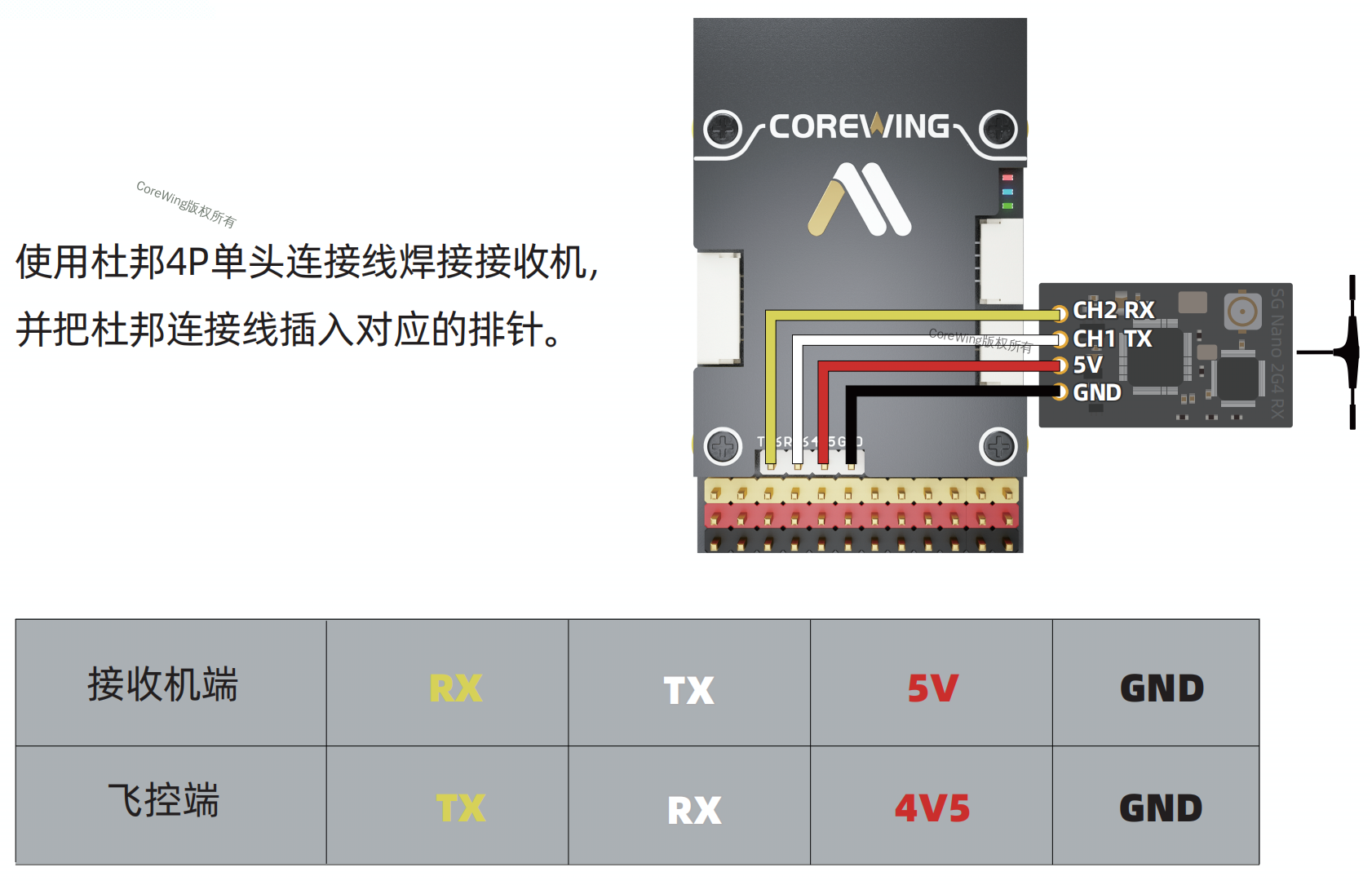
6.1 Hardware Connection
UART Selection Guide
CoreWing Flight Controller Receiver Connection Method:
Must be connected to UART6
Reason: UART6 has built-in DMA support and can stably run at high baud rates of 460800bps
⚠️ Note: Other UARTs (like UART4) are hardware compatible but lack DMA support, preventing proper MAVLink communication.
6.2 Flight Controller Parameter Settings
Method 1: One-click Configuration (Recommended)
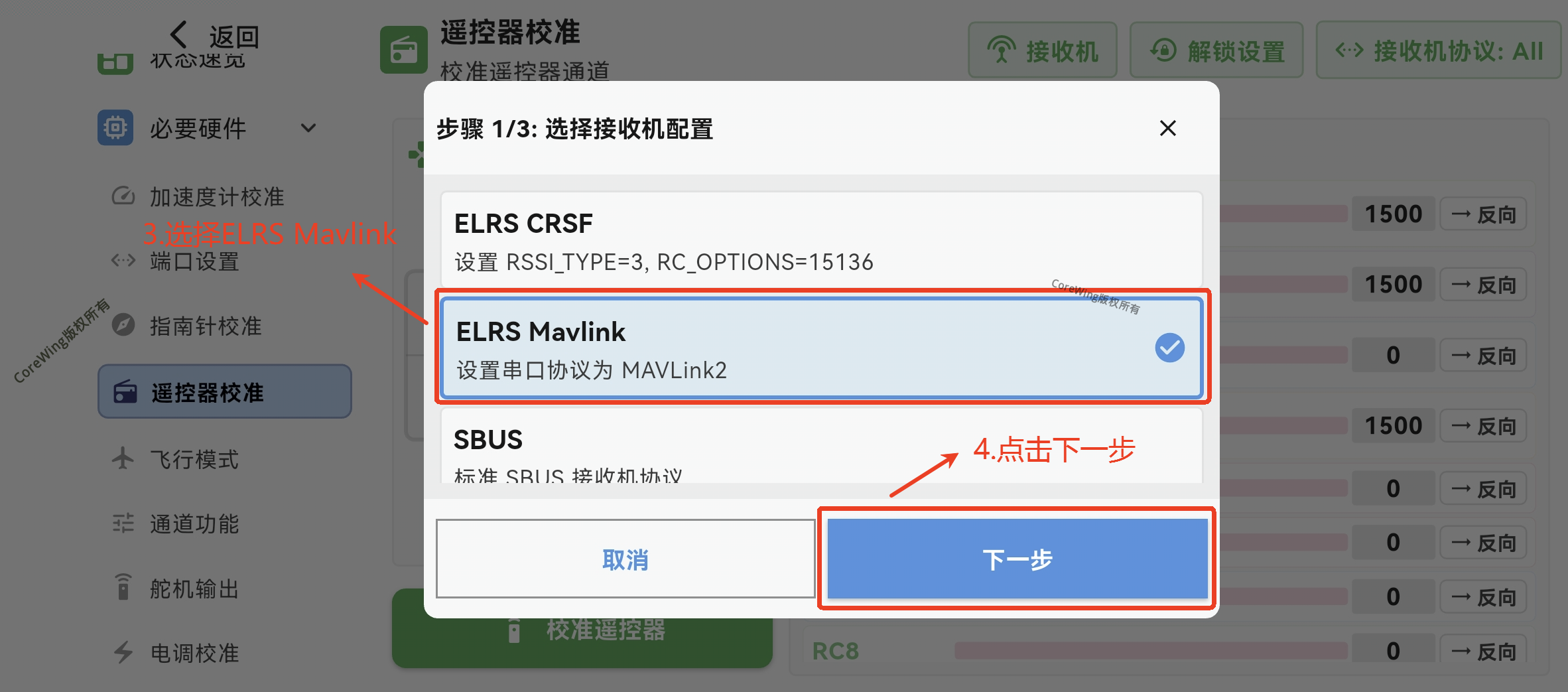
- Open CoreWing APP → Connect to flight controller → Enter the RC Transmitter Calibration page
- Click Receiver

- Select ELRS MAVLink → Click Next
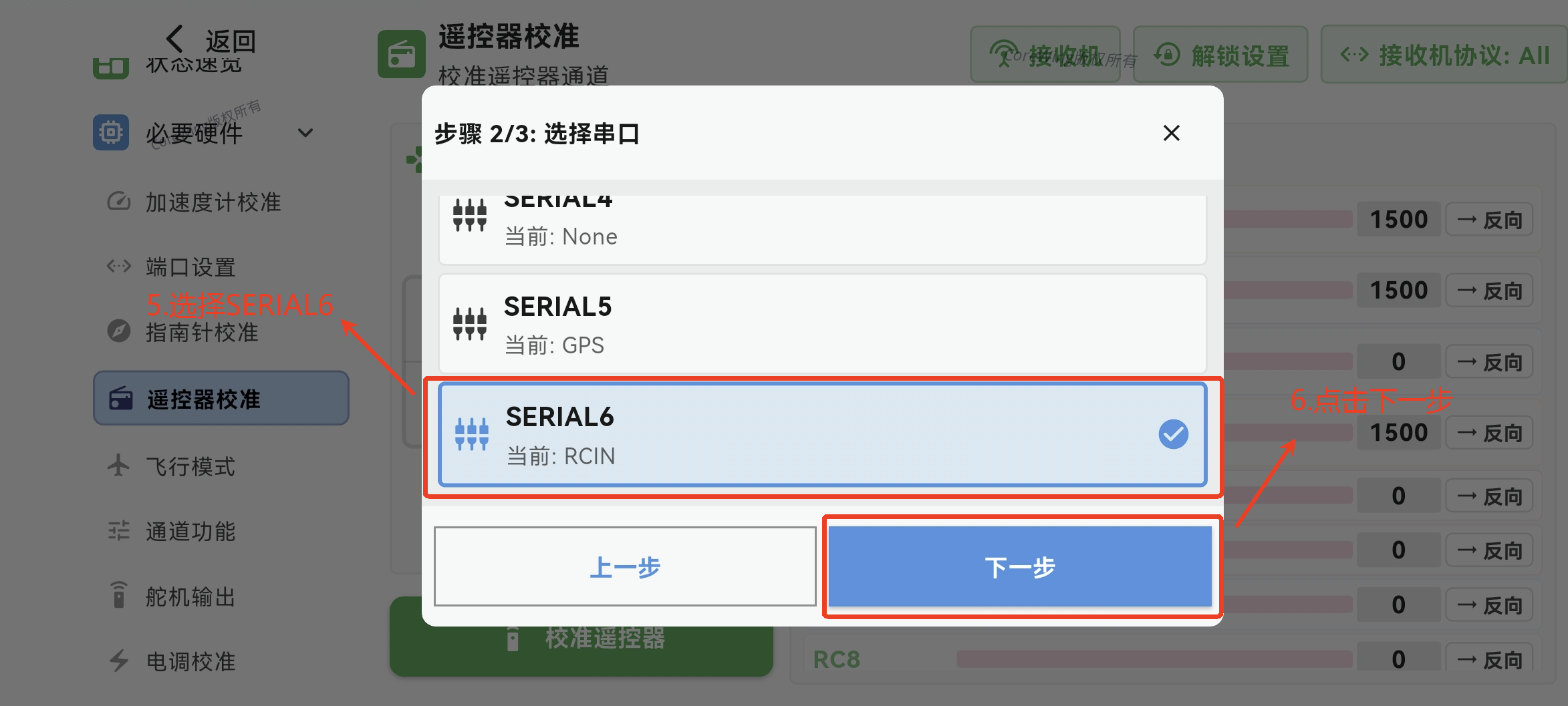
- Select UART6 → Click Next
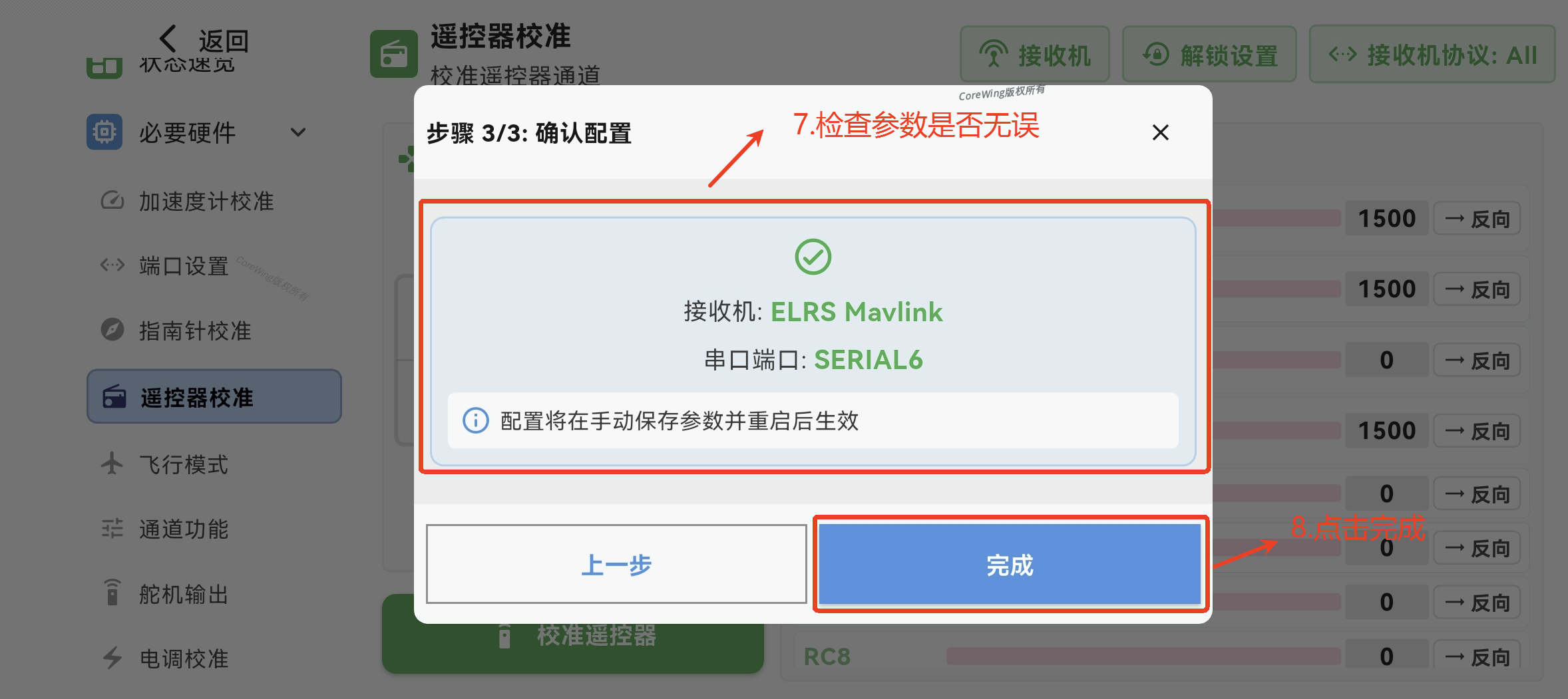
- Click Finish, the flight controller will automatically restart
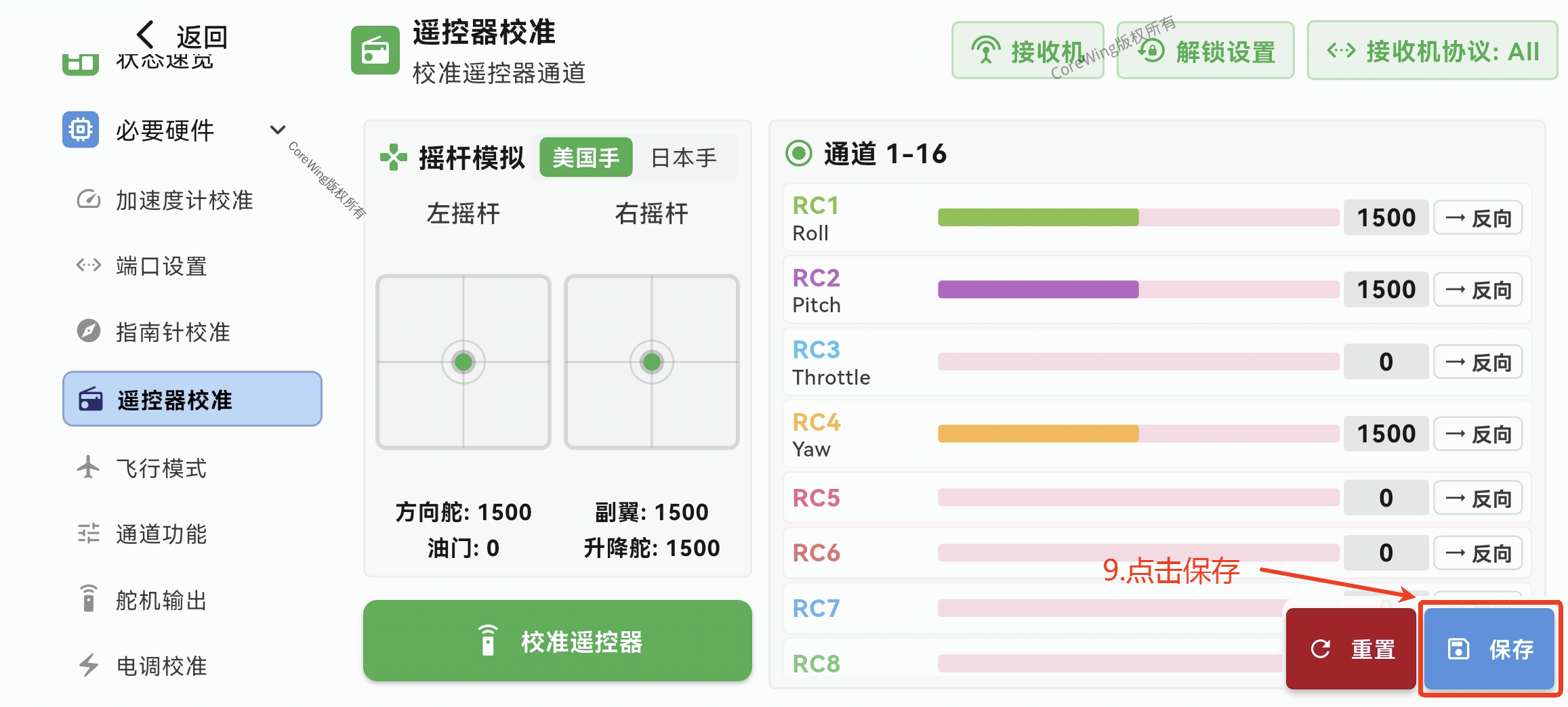

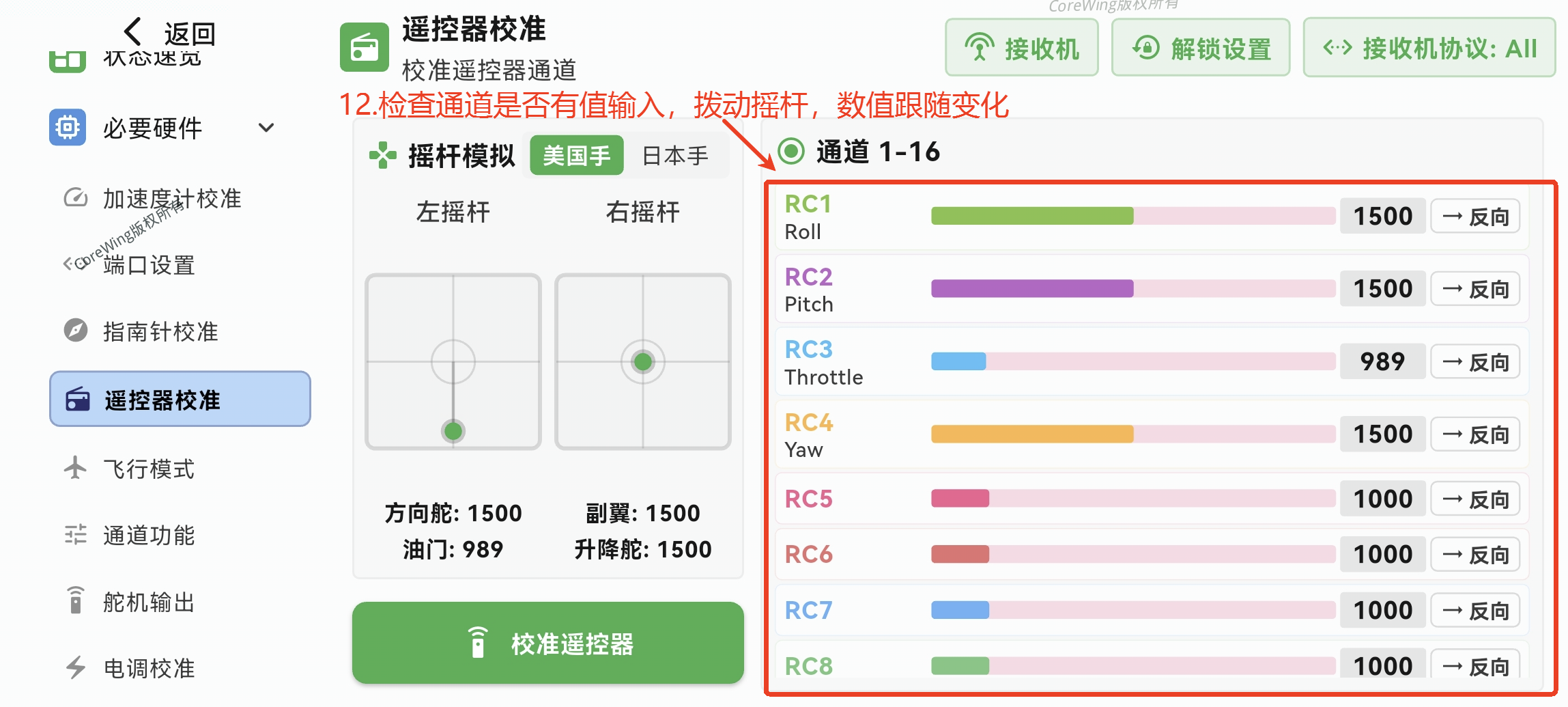
- Verify connection: Return to the RC transmitter calibration page and check if channel values change with stick movements
Method 2: Manual Parameter Configuration
Open CoreWing APP → Go to the All Parameters page
Search
SERIAL6Set the following parameters:
SERIAL6_PROTOCOL= 2 (MAVLink)SERIAL6_BAUD=460(460800)
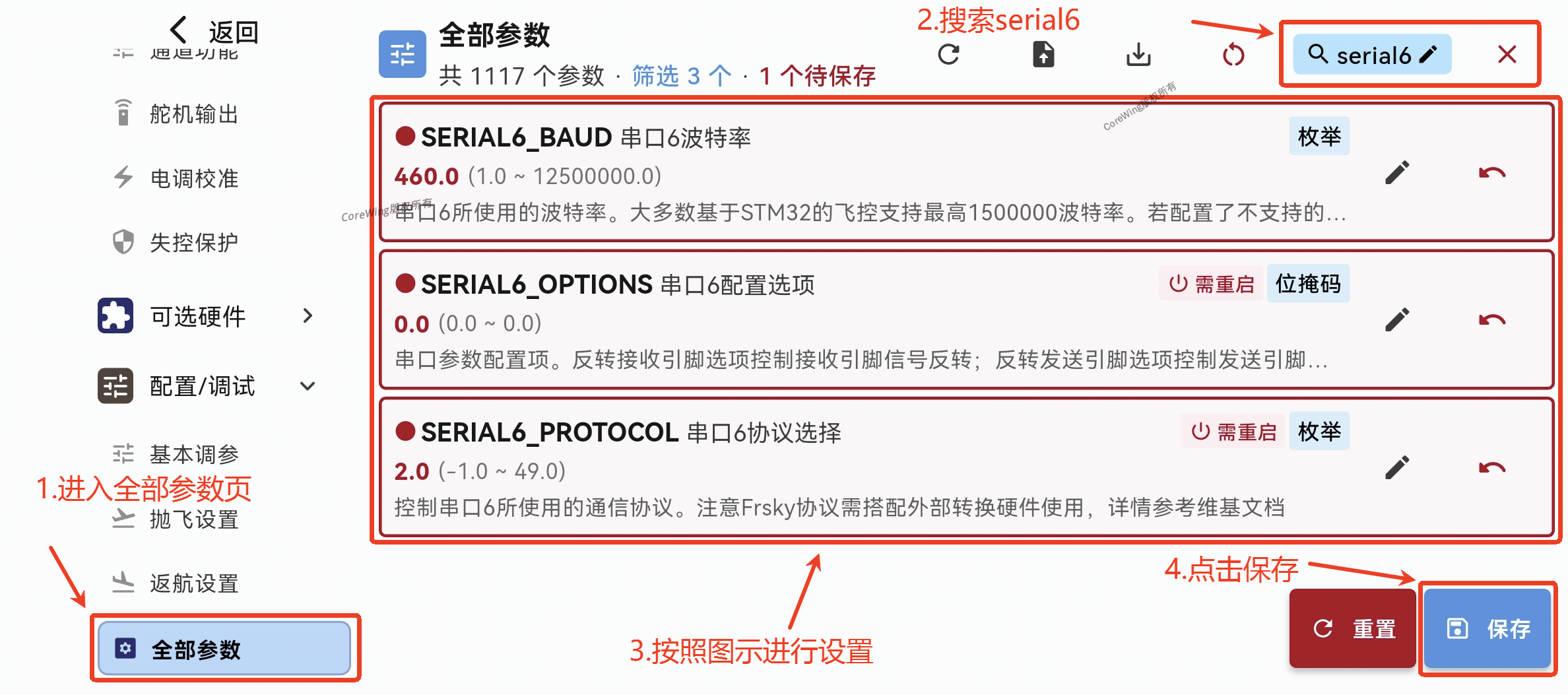
- Click save and restart the flight controller
- Verify connection: Check if channel values on the RC transmitter calibration page are normal

7. Ground Control Station Connection
7.1 CoreWing APP - Bluetooth Connection
Step 1: Configure Backpack
- Go to ExpressLRS script on RC transmitter → Click Backpack settings
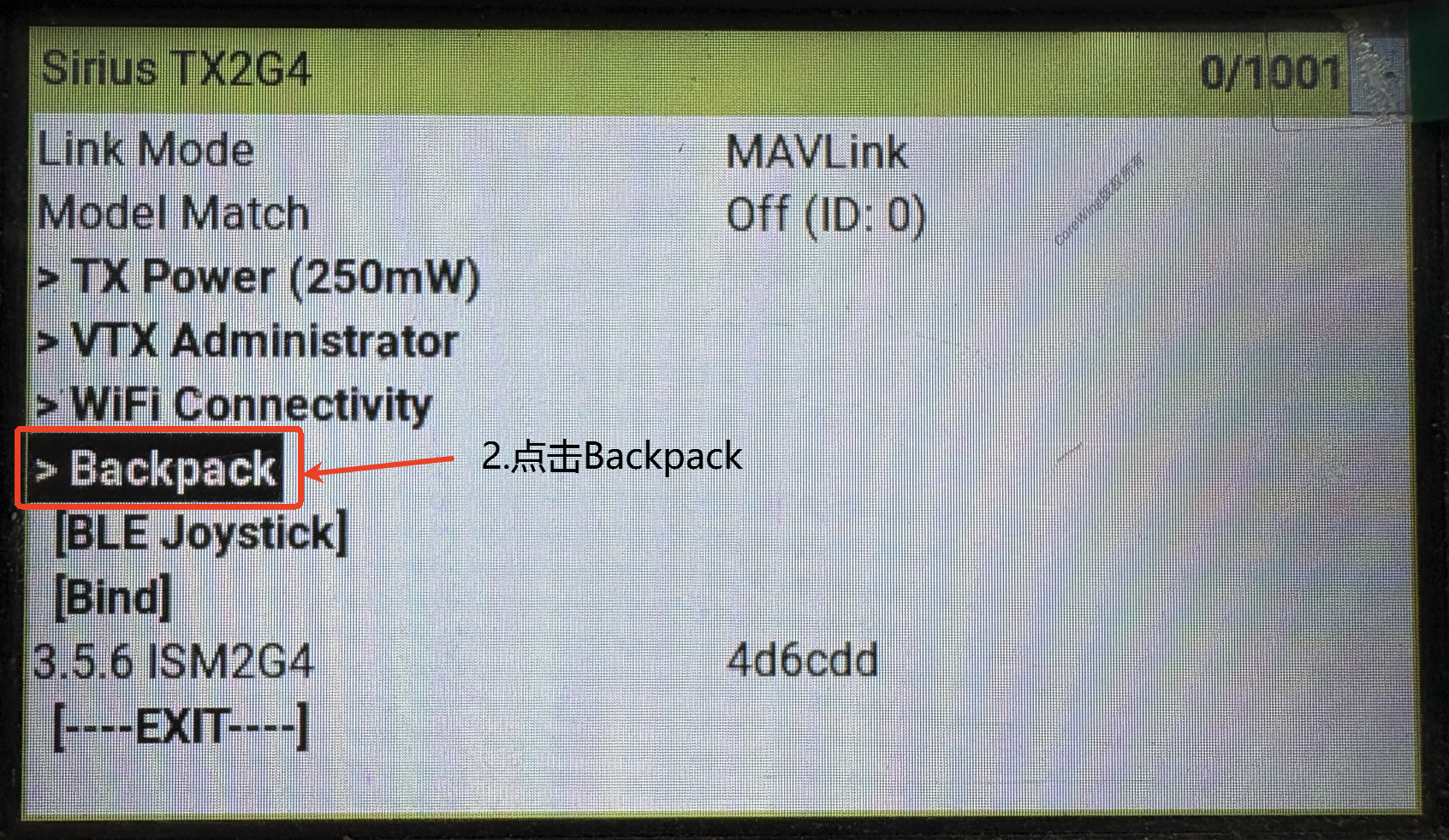
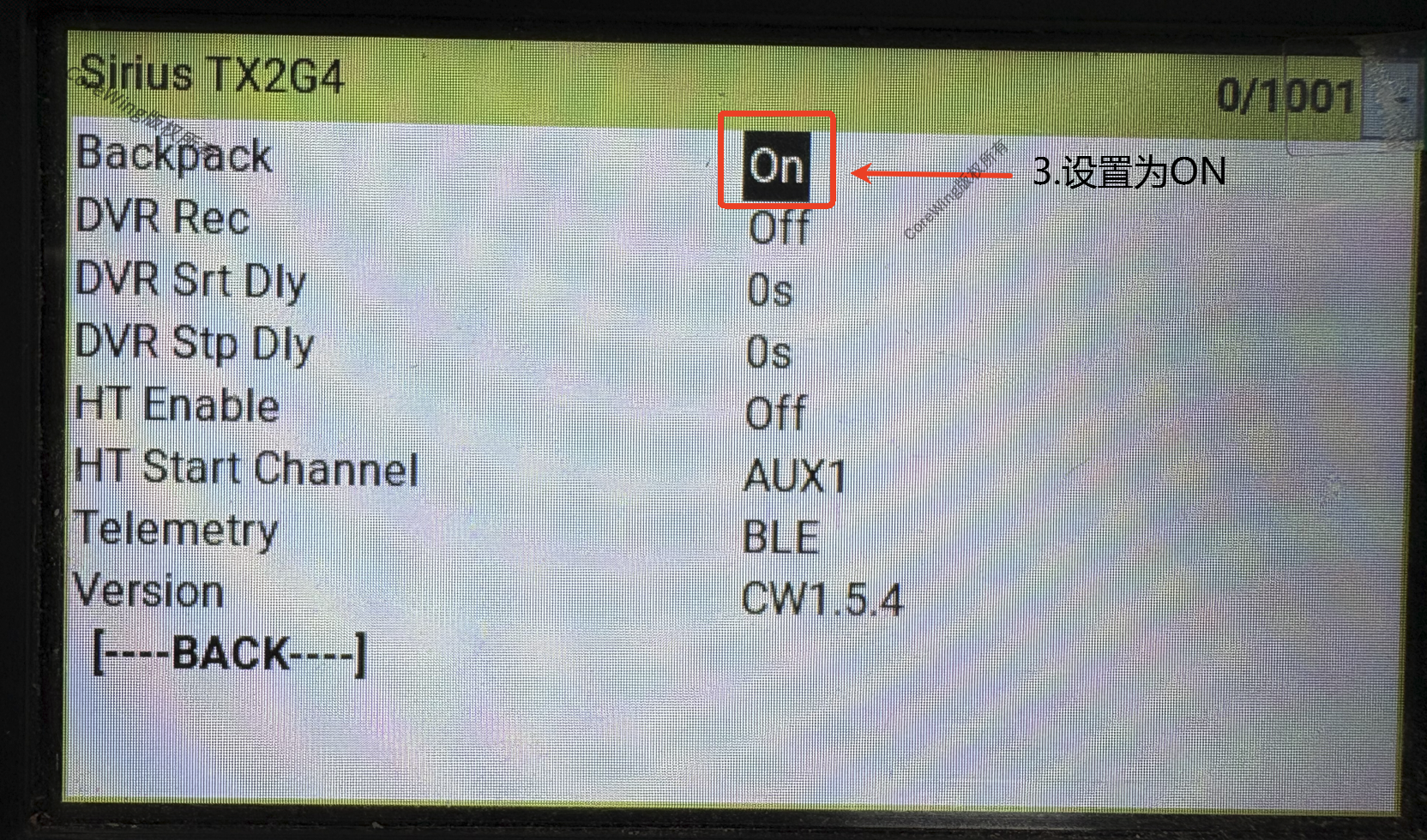
- Set Backpack to On
- Set Telemetry to
BLE(Bluetooth)
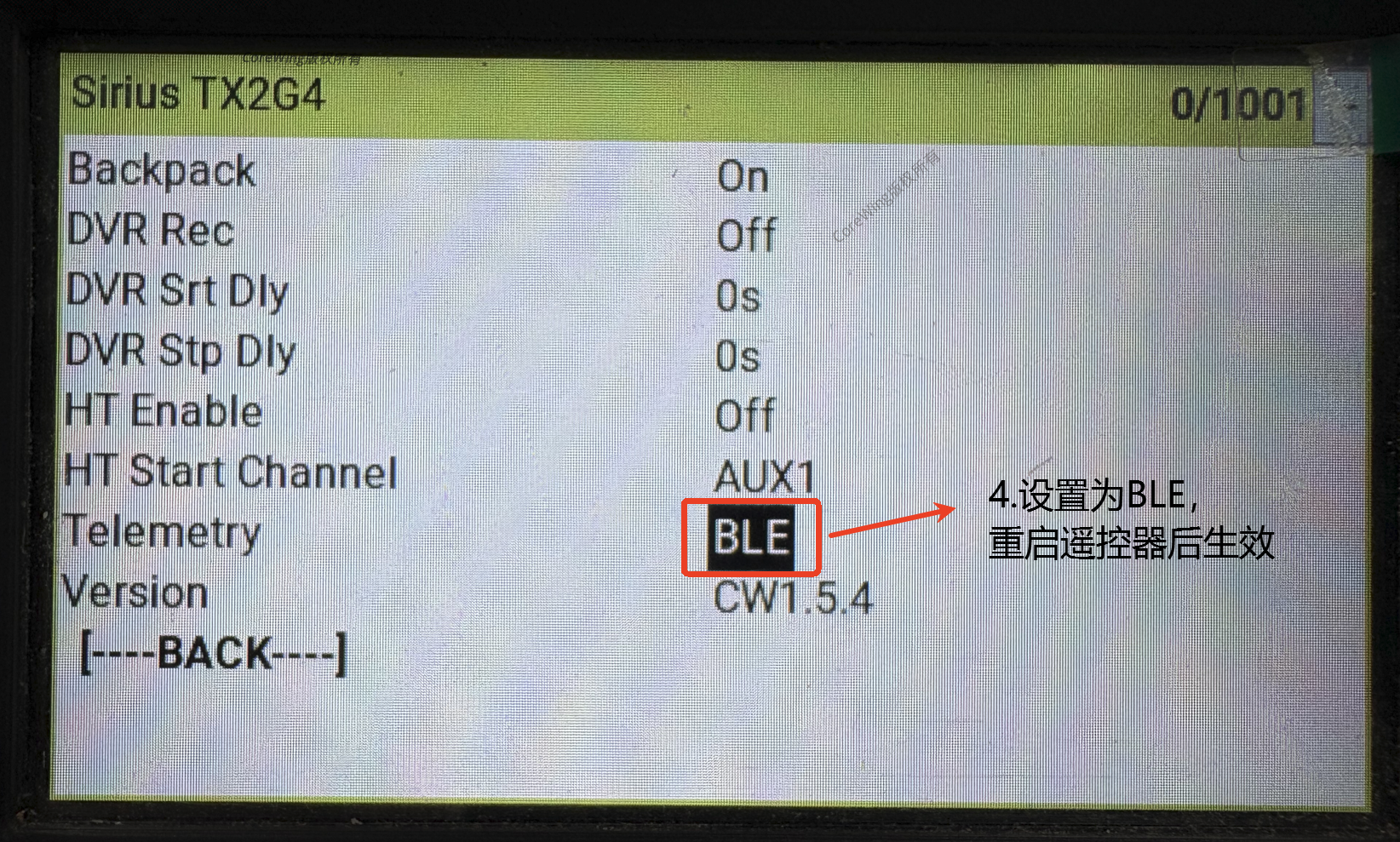
- Restart the RC transmitter to apply settings
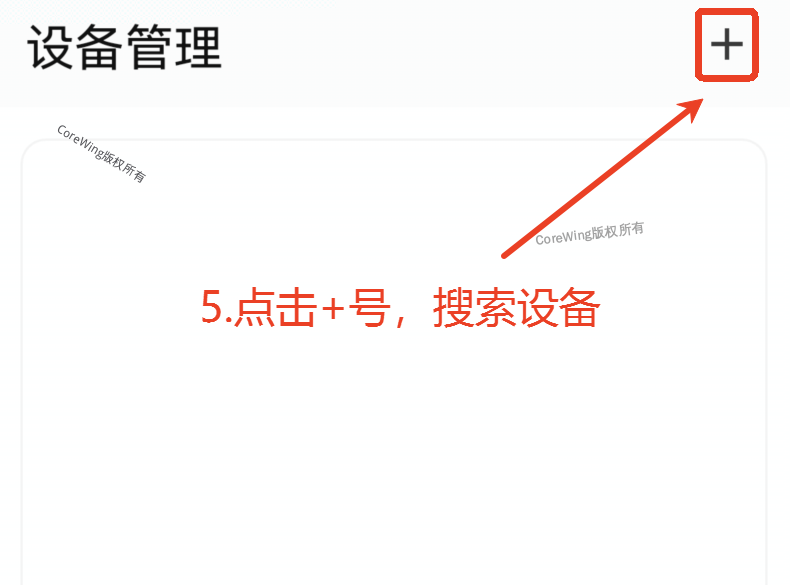
Step 2: APP Connection
- Open CoreWing APP → Click "+" → Select Bluetooth connection
- Find the CoreWing Sirius-xxxx device and click to connect
Step 3: View Telemetry
After successful connection, go to the telemetry viewing page, and the information bar will display aircraft data transmitted back from the VTX:
7.2 CoreWing APP - WiFi Connection
Step 1: Configure Backpack
Enter Backpack settings
Set Telemetry to WiFi
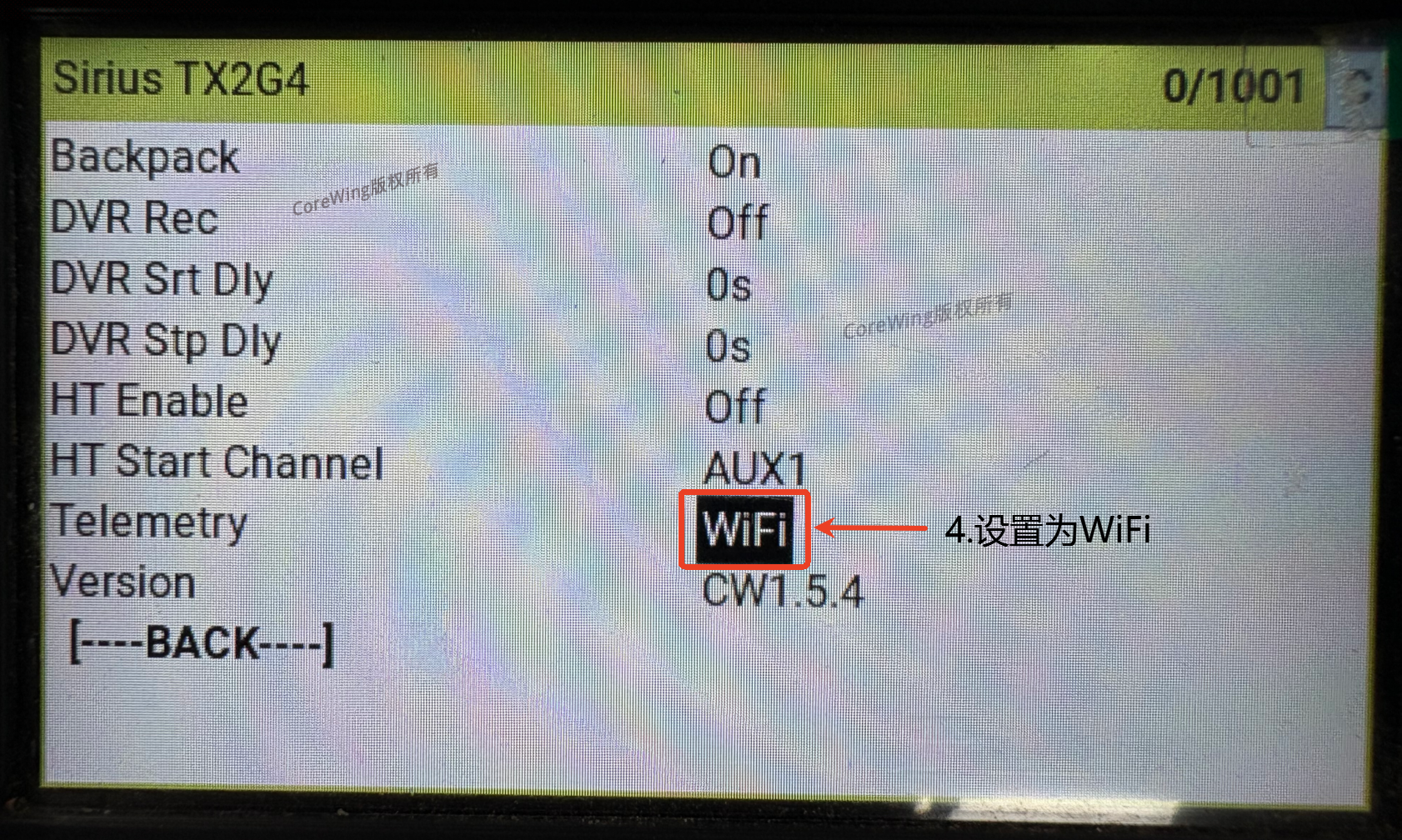
- Restart the RC transmitter to apply settings
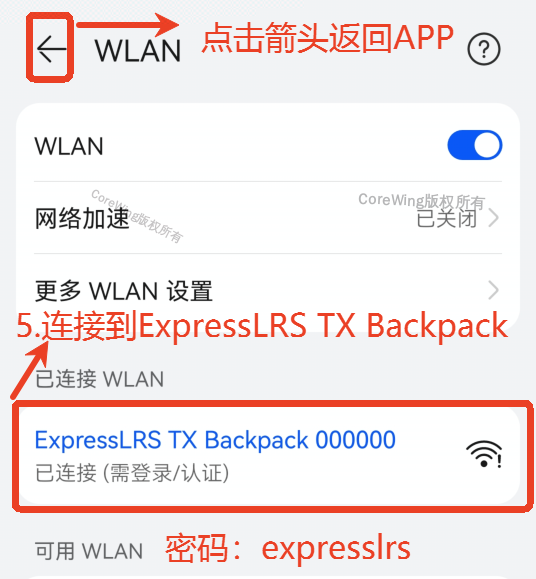
Step 2: Phone WiFi Connection
Find the ExpressLRS TX Backpack 000000 WiFi and connect (password: expresslrs)
Step 3: APP Connection
- Open CoreWing APP → Click "+" → Select ELRS Backpack connection

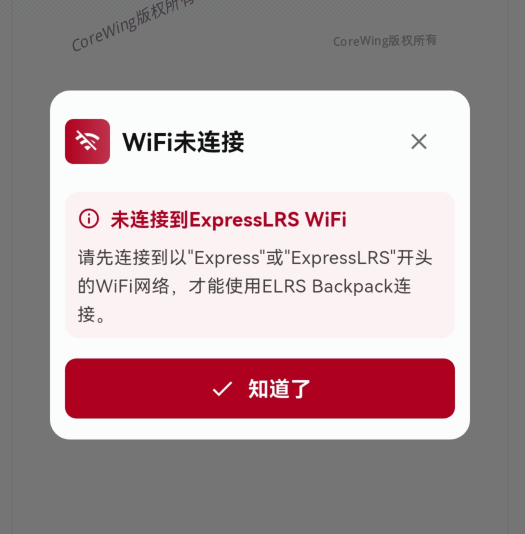
WiFi Connection Tip
If the phone WiFi is not connected to a network starting with ExpressLRS, the following prompt will be displayed:
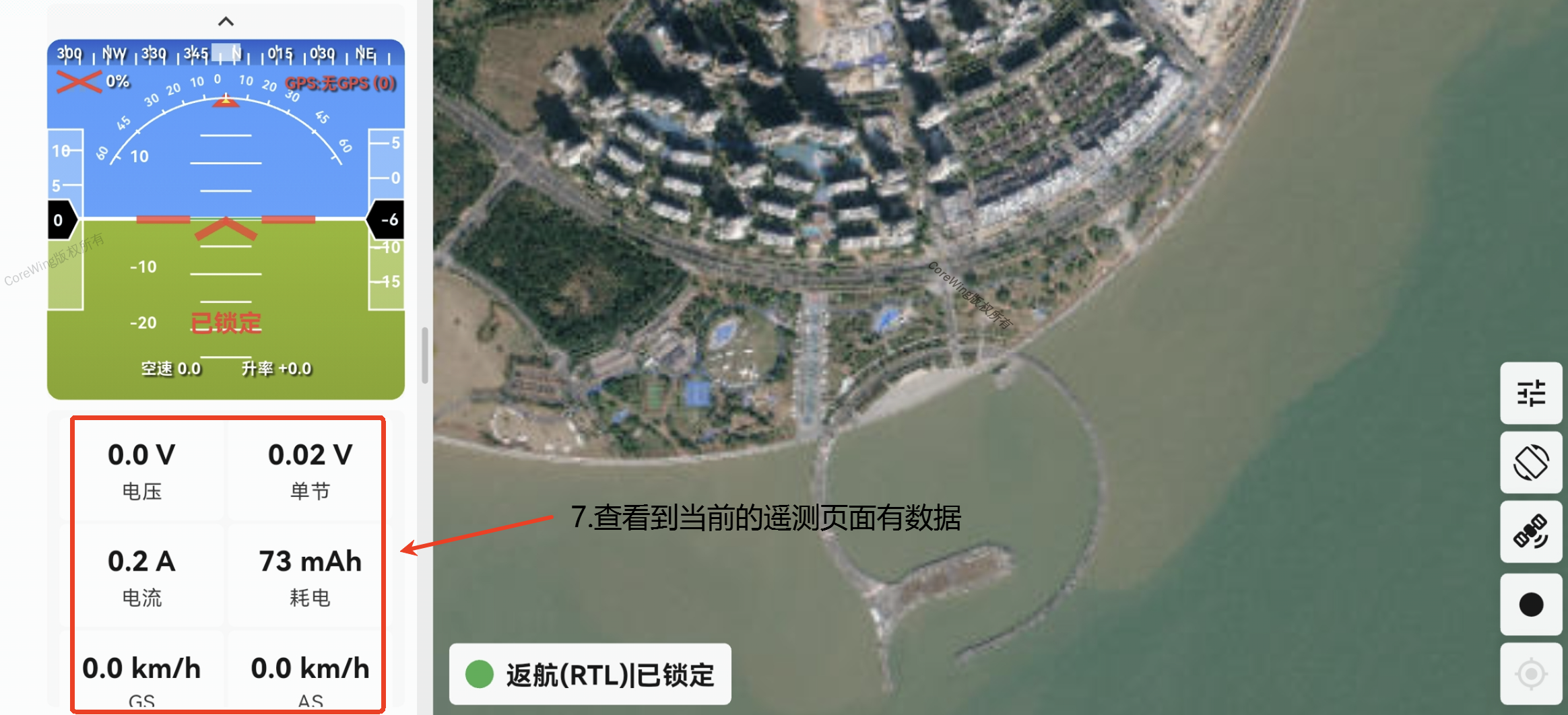
Step 4: View Telemetry
After successful connection, the telemetry page displays aircraft data:
7.3 MissionPlanner Ground Control Station Connection
Step 1: Configure Backpack WiFi
Enter Backpack settings
Set Telemetry to WiFi
Restart the RC transmitter to apply settings
Step 2: Computer WiFi Connection
Find the ExpressLRS TX Backpack 000000 WiFi and connect (password: expresslrs)
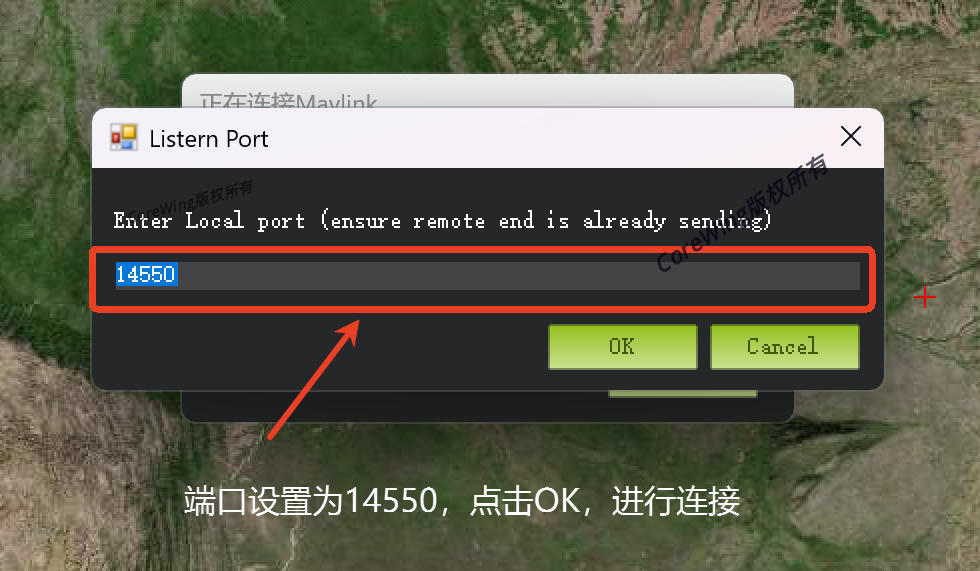
Step 3: MissionPlanner Connection Configuration
Open MissionPlanner
Select UDP connection mode
Set baud rate to
115200Set port to
14550Click connect

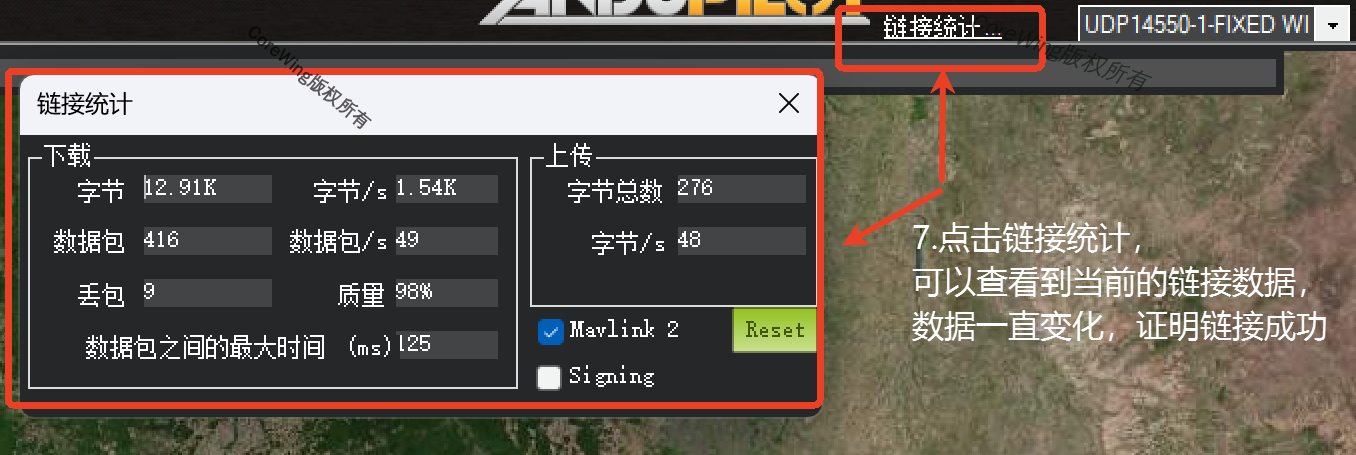
Step 4: Verify Connection
After successful connection, click Connection Statistics to view MAVLink telemetry link status:
Technical Support QR Code
If you have any issues, please scan the QR code below for technical support:
