INAV Quick Parameter Tuning Guide (APP)
Important
This article uses INAV 7.0.0 firmware and a T-tail aircraft as an example!
I. APP Introduction
The SpeedyBee APP is a full-featured FPV configuration tool for iOS and Android mobile devices. It allows users to connect to the flight controller via Bluetooth, Wi-Fi, and other methods to conveniently adjust drone parameters outdoors without needing to carry a laptop.
Main features for fixed-wing aircraft include:
Supports tuning for INAV and ArduPilot firmware.
Supports convenient tuning for
INAVfirmware, making it easy for beginners to get started.Supports ArduPilot telemetry.
Supports flashing flight controller firmware.
Supports upgrading Bluetooth firmware for wireless boards and configuring functions within wireless boards.
Important
The following describes how to use the APP for quick fixed-wing tuning with INAV firmware (using a T-tail as an example; other aircraft types can be configured by analogy with the ground station configuration tutorial)
II. Equipment Preparation
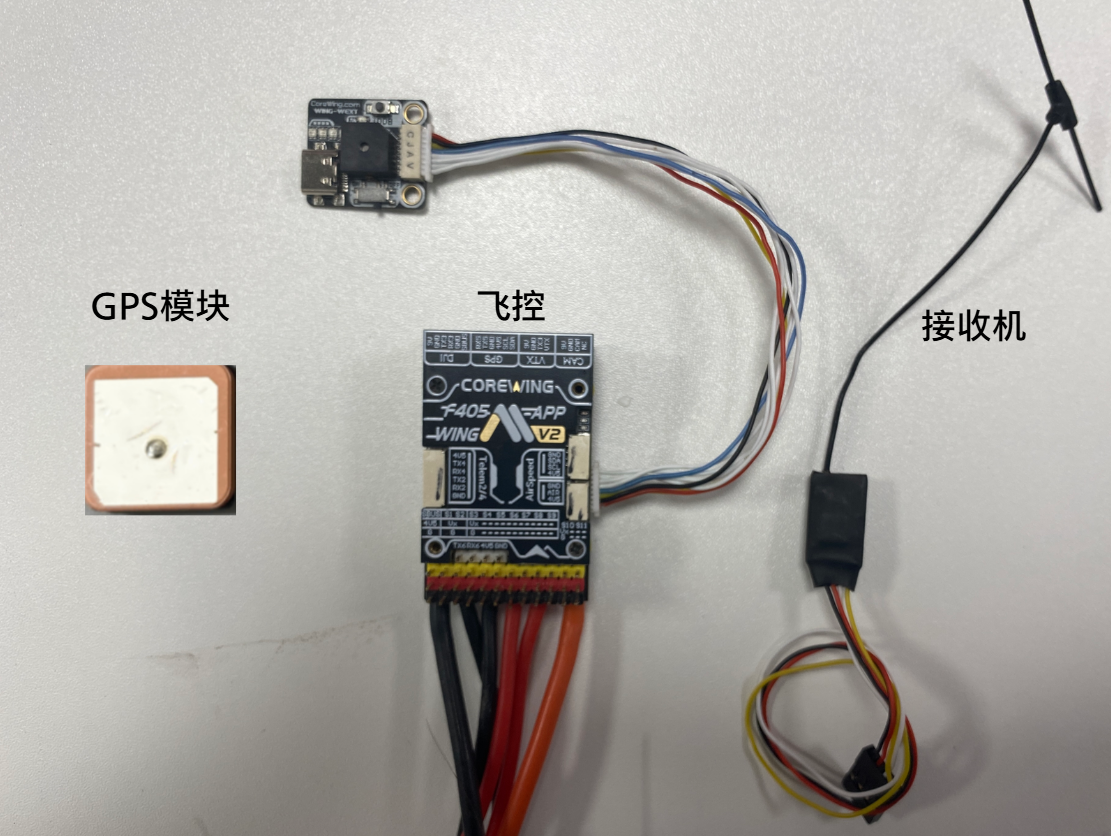
Required Equipment:
1) Flight Controller: CoreWing F405 WING V2/ SpeedyBee F405 WING APP/ SpeedyBee F405 WING MINI - Any of these flight controllers are suitable for this tutorial.
2) RC Transmitter: Using RadioMaster Boxer /RadioMaster TX16S as an example.
3) Receiver: Using SpeedyBee ELRS Nano 2.4G RX as an example.
4) GPS Module: Using Beizheng BZ-251 GPS module as an example .
5) Motor: 2212 KV980 motor, suitable for Feiweng, for reference only.
6) ESC: 35-45A ESC, suitable for Feiweng, for reference only.
7) Servo: 12g metal servo, suitable for Feiweng, for reference only.
8) Battery: 6S1P 10000mAh battery, suitable for Feiweng, for reference only.
9) Propeller: 8-inch two-blade propeller, suitable for Feiweng, for reference only.
Optional Equipment:
1) Analog VTX: Using SpeedyBee TX 1600 VTX and RunCam Phoenix2 SE V2 camera as an example.
2) Digital VTX: Using DJI O4 AIR UNIT VTX as an example.
3) Airspeed Sensor: A digital airspeed sensor is recommended.

Important
For ground station installation, refer to this article: https://docs.corewing.com/plane/software/insoftware/inav-version-install.html
How to update flight controller firmware - using INAV ground station: https://docs.corewing.com/plane/beforetuning/inav-fw-update.html
III. Initial Setup
3.1 Flight Controller Connection
Click the + button
Click Connect Now
Click Flight Controller Tuning
Click Skip




3.2 Model Configuration
- Select Fixed-wing Aircraft with Tail

Important
Enter the Mixer page, select Airplane, select Airplane, click Load and Apply.

3.3 Accelerometer Calibration
Important
Note: When calibrating the accelerometer, be sure to remove the flight controller from the cabin and place it on a flat surface for calibration to improve accuracy and ensure flight stability!
Enter the Configuration page.
Select Auto (Auto-detect), confirm the accelerometer has been detected.
Important
If the accelerometer displays red, try reflashing the firmware to resolve the issue. If the issue persists, contact after-sales support!

Click Calibrate
Click Calibrate Accelerometer
Follow the diagram for calibration
Important
After calibrating each side, you need to click Calibrate Accelerometer once.

Important
The diagram below corresponds to the accelerometer calibration above.

Important
After calibration is complete, click Save and Restart.
Important
If there are significant temperature or climate changes during use, the gyroscope has suffered a severe impact, or sensors have been replaced, the accelerometer needs to be recalibrated!
3.4 Port Configuration
Important
1. Different flight controllers use different ports
2. Refer to the table below for settings, paying attention to port/baud rate/protocol
3. Prioritize setting up the receiver, noting that different flight controllers use different ports for the receiver
4. Other peripherals have detailed configuration instructions in their respective sections**


3.5 GPS Configuration
Important
Enable GPS to view the NAV RTH (Return to Home) flight mode settings in the Modes page.
Enter the
GPSpage.Enable the GPS for Navigation and Telemetry option.
Click Save and Restart.

3.6 Transmitter Settings and Flight Mode Configuration
3.6.1 Transmitter Settings
Important
- Please bind the transmitter to the receiver before proceeding with the following steps.
- For information on how to bind an ELRS receiver to the transmitter, refer to this article: https://docs.corewing.com/plane/ardupilot/settings/rc/elrs-bind.html
Enter the Receiver page.
Configure according to the diagram.
Click Save and Restart.

Important
For detailed information on how to set channel travel on EDGE TX, refer to this article: https://docs.corewing.com/plane/inav/settings/rc/edgetx-endpoint-setup.html
- Navigate to the MDL/MIXES page, check if the transmitter's CH1-CH4 are set as follows. If not, modify the transmitter's mixer settings.

3.6.2 Arm Channel Configuration
1. Transmitter Settings
Select a 2-position switch
Navigate to the MDL/MIXES page and configure its mixer as
CH5

2. Ground Control Station Settings
Important
Note: Arming is only possible in flight modes that do not use GPS, such as ANGLE (Stabilize). It cannot be done in GPS-dependent modes like NAV ALTHOLD!
Enter the Modes page.
Set the
ARM(Arm/Disarm) channel toCH5, with values between min:1700-max:2100.Click Save.

3.6.3 Return-to-Home Channel Configuration
1. Transmitter Settings
Select a 2-position switch.
Navigate to the MDL/MIXES page and configure its mixer as CH6 (can be set according to actual situation, for reference only).

2. Enable Return-to-Home Switch Setting
Important
By default, the return-to-home mode can only be activated when more than 5 meters away from the takeoff point. Within 5 meters, the OSD will not display the return-to-home mode!
Enter the Modes page.
Set the
NAV RTH(Return to Home) channel toCH6, with values between min:1700-max:2100.Click Save.

3.6.4 Flight Mode Configuration
1. Transmitter Settings
Select a 3-position switch, set as a 3-stage flight mode switch.
Navigate to the MDL/MIXES page and configure its mixer as
CH8.

2. Ground Control Station Settings
Enter the Modes page.
Set the Stabilize Mode Channel to
CH8, configure according to the diagram below.Use Auto Tuning and Stabilize Mode together, configure according to the diagram below.
Click Save.


Important
Effect: First position is ACRO mode, second position is ANGLE mode, third position is Auto Tuning in ANGLE mode.
Important
For detailed information on flight modes, refer to this article: https://docs.corewing.com/plane/inav/settings/fc/flight-modes.html
4. Equipment Installation
4.1 Flight Controller Wiring
- Power Wiring
Important
Note:
The positive power lead must be connected to the designated pad.
ESC refers to the electronic speed controller.
When soldering, ensure there are no cold joints.

4.2 Flight Controller Installation
The flight controller should be installed at the aircraft's center of gravity. Refer to the image below for installation:

Important
If you need to adjust the flight controller's installation orientation, refer to this article for setup: https://docs.corewing.com/plane/inav/settings/fc/fc-orientation.html
4.3 Peripheral Installation and Setup
- Peripheral Wiring

4.3.1 Receiver Installation
Installation location is shown in the image, route the antenna outside the airframe and secure it with tape:

4.3.2 Servo Output Setup (Servo and Motor Configuration) and Control Surface Check
Enable servo and motor outputs:
Important
After enabling servo and motor outputs, the motors and servos can operate.
In fixed-wing mode, enable motor disarming at low throttle to prevent motor rotation after arming, which could cause unnecessary damage.

Output Wiring:
Important
The flight controller has a built-in BEC. If the ESC also has a BEC, you must remove the middle power wire and insulate it properly to prevent vibration during flight from causing it to contact a conductor and cause a short circuit!!

Parameter Configuration:
Enter the mixer page
Configure according to the diagram
Click save and restart
| Channel | Output | Description |
|---|---|---|
| S1 | Throttle | Throttle |
| S2 | Throttle | Throttle |
| S3 | Elevator | Elevator |
| S4 | Aileron | Left Aileron |
| S5 | Aileron | Right Aileron |
| S6 | Rudder | Rudder |

Control Surface Check:
a. Control surface feedback check in stabilization mode
Important
You must first click to calibrate the compass, wait 30 seconds, then click save and restart
Important
Switch the flight mode to ANGLE
When the aircraft rolls left, the left wing control surface deflects down, and the right wing control surface deflects up.
When the aircraft rolls right, the left wing control surface deflects up, and the right wing control surface deflects down.
When the aircraft pitches up, the elevator deflects down.
When the aircraft pitches down, the elevator deflects up.
b. Control surface feedback check in manual mode
Important
Switch the flight mode to ACRO
When the aileron stick is moved left, the feedback shows the left wing control surface deflecting up and the right wing control surface deflecting down.
When the aileron stick is moved right, the feedback shows the left wing control surface deflecting down and the right wing control surface deflecting up.
When the elevator stick is moved up, the feedback shows the elevator deflecting down.
When the elevator stick is moved down, the feedback shows the elevator deflecting up.
When the rudder stick is moved left, the feedback shows the rudder deflecting left.
When the rudder stick is moved right, the feedback shows the rudder deflecting right.
First, check if the stabilization feedback is correct. If it's incorrect, add a negative sign to the Weight value of the corresponding servo mixer to reverse the control surface direction.
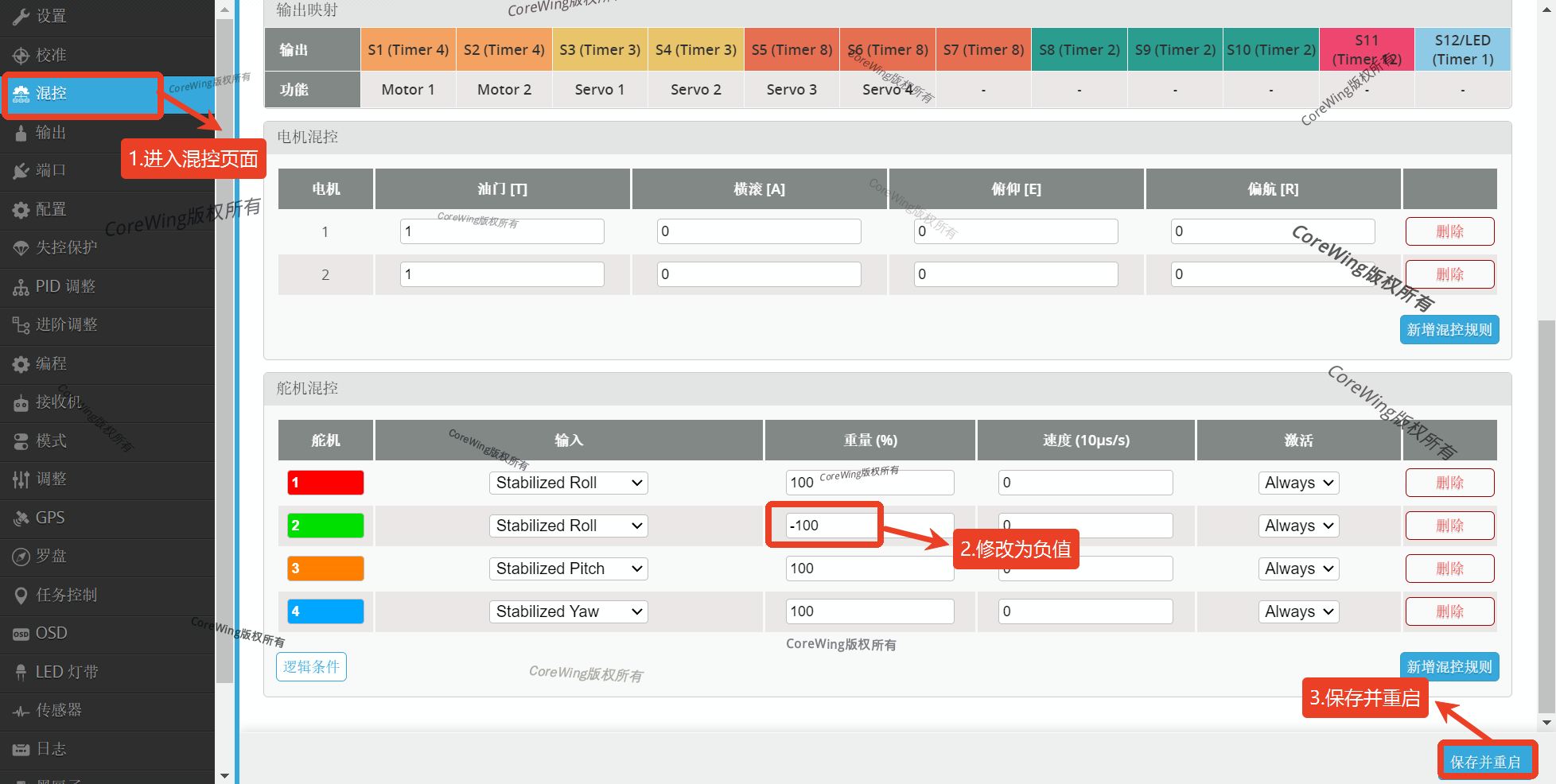
Next, check if the manual feedback is correct. If it's incorrect, you need to reverse the settings in the transmitter.
For example, with an EdgeTX system transmitter, navigate to MDL→INPUT page and set the Weight value to -100 to reverse the manual feedback.


4.3.3 GPS Module Installation and Setup
Installation location is shown in the image. Secure the module to the bottom with 3M adhesive ensure the module is mounted securely, as this will significantly affect flight performance:
Important
When installing, ensure it is mounted horizontally and vertically without tilting, otherwise the installation angle cannot be set correctly.

Important
Install away from metal objects such as magnetic compartment covers, metal pushrods, etc., as this will interfere with the compass.
Install away from devices such as receivers, servo wires, motors, etc., as this will interfere with the compass.
Confirm that the installation is secure.
For detailed installation procedures for different modules, please refer to their respective manuals.
Important
For detailed information on how to install and set the compass installation direction, refer to this article: https://docs.corewing.com/plane/inav/settings/gps/inav-compass-setup.html
Parameter Configuration:


4.3.4 Video Transmitter Installation and OSD Setup
- Analog Video Transmitter Installation:

- Analog Video Transmitter Parameter Configuration:


- HD Video Transmitter Installation:

- HD Video Transmitter Parameter Configuration:


4.3.5 Airspeed Sensor Installation and Setup
Airspeed sensor installation location reference:

Important
For detailed information on airspeed sensor installation, parameter configuration, and calibration, refer to this article: https://docs.corewing.com/plane/inav/settings/airspeed/setup.html
5. Pre-flight Tuning
5.1 ESC Calibration
Important
Ensure the battery is disconnected and propellers are removed!
① Enter the Output page.
② Check the risk acknowledgment option.

③ Immediately push the Master to 100%.

④ Power the flight controller with the battery.
⑤ The ESC will emit a tone → immediately push the Master to 0% → the ESC tone will end.

BLHeli32/BLHeli_S ESC Calibration Sounds:
Connect the battery and wait 2 seconds → "playing a song" is the throttle maximum confirmation tone → wait for the song to finish → push the throttle to minimum and wait 1 second → "playing another song, dee-dee" is the throttle minimum confirmation tone → calibration complete
PWM ESC Calibration Sounds:
Connect the battery and wait 2 seconds → "beep-beep" is the throttle maximum confirmation tone → push the throttle to minimum and wait 1 second, N beeps indicate the LiPo cell count → "beep" is the throttle minimum confirmation tone → calibration complete.
⑥ Gently push the throttle, the motor should spin immediately. Push the throttle from 0% to 20% and check if the response is linear.
⑦ If the result differs from the above, disconnect the battery and return to step ② to recalibrate.
Important
For detailed information on enabling Dshot protocol, refer to this article: https://docs.corewing.com/plane/inav/settings/esc/esc-calib-dshot.html
5.2 Motor Direction Check and Propeller Installation
Select regular or reverse-pitch propellers based on motor rotation direction
When installing propellers, ensure the side with text faces toward the nose of the aircraft
Important
If the motor rotation direction is incorrect, swap any two of the three motor wires for any motor to correct the direction.

5.3 Compass Calibration
Important
Please confirm the compass installation direction before calibration!
Enter the Configuration page.
Select Auto for automatic recognition, ensure the compass is properly identified.
Important
If the compass icon appears red, it indicates improper recognition. Please check the wiring or if the compass is functioning properly!

Enter the Calibration page.
Click Calibrate Compass.
Within 30 seconds, rotate the aircraft 360° along each axis.

5.4 Loss of Control Protection Parameter Settings
Enter the Loss of Control Protection page.
Select Return to Home to ensure the aircraft can autonomously return and hover above the pilot in case of signal loss.
Click Save and Reboot.

Enter Advanced Tuning.
Configure according to the diagram.
Note that the parameter in the red box needs to be set to
NEVER.


Important
After completing the settings, remember to click Save and Reboot to save the parameters.
Enter Advanced Tuning.
Can be configured according to the diagram, adjust cruise throttle according to actual conditions.
Click Save and Reboot.
Important
It is recommended that during the first return-to-home, enter the Advanced Tuning option to allow manual throttle increase to avoid the default return speed being too low, preventing accidents.

6. Flight Test
6.1 Pre-flight Parameter Check

Important
For detailed information on common issues with arming, refer to this article: https://docs.corewing.com/plane/inav/settings/fc/fcproblem/unlock-fail-common.html
6.2 Pre-flight Inspection
6.2.1 Center of Gravity Check
1. Reference aircraft markings:
- Fixed-wing aircraft will have the recommended center of gravity marked, typically at 25-30% of the chord length from the leading edge of the main wing.

2. Finger support method:
Place the aircraft on two fingers at the recommended center of gravity point under the main wing, and gently balance the fuselage.
If the nose is too heavy or the tail is too heavy, adjust the battery or add ballast.
Nose heavy (center of gravity too far forward):
The aircraft will have difficulty climbing during flight, which may cause takeoff failure and crash.
Try moving the battery backward or reducing nose ballast.
Tail heavy (center of gravity too far back):
The aircraft is prone to stall on climb.
Solution: Move the battery forward or add nose ballast.
6.2.2 Pre-flight Control Surface Check
Important
Switch flight mode to ANGLE
When the aircraft rolls left, the left aileron moves down, and the right aileron moves up.
When the aircraft rolls right, the left aileron moves up, and the right aileron moves down.
When the aircraft pitches up, the elevator moves down.
When the aircraft pitches down, the elevator moves up.
Important
Switch flight mode to ACRO
When the aileron stick is moved left, the feedback shows the left aileron moving up and the right aileron moving down.
When the aileron stick is moved right, the feedback shows the left aileron moving down and the right aileron moving up.
When the elevator stick is moved up, the feedback shows the elevator moving down.
When the elevator stick is moved down, the feedback shows the elevator moving up.
When the rudder stick is moved left, the feedback shows the rudder moving left.
When the rudder stick is moved right, the feedback shows the rudder moving right.
6.2.3 Satellite Number Check
Important
Outdoors, check if the satellite count is greater than 8. Only take off if there are more than 8 satellites!
If the satellite count remains below 8, move to an open area. If there's no improvement, replace the GPS module.

6.2.4 Wind Direction Confirmation
Observe wind direction:
Observe wind indicators such as smoke, windsocks, flags.
Throw light objects (like grass leaves) into the air and observe their direction of movement.
Determine upwind takeoff direction:
Upwind takeoff provides more lift and reduces required takeoff speed.
Downwind takeoff may cause stalling or the nose being pushed down by the wind, easily leading to a crash.
6.3 Takeoff Instructions
Based on the aircraft's actual configuration, choose between hand-launch or runway takeoff to ensure a successful takeoff.
6.3.1 Hand Launch
1. Mode preparation:
Select
ACRO Modeto ensure sufficient control surface deflection.Throttle to 60-80% to ensure sufficient takeoff thrust.
2. Takeoff posture:
Hold the aircraft under the wings; for flying wings, hold the wings themselves to prevent hand injury.
Launch at a 30° upward angle to ensure sufficient lift.
3. Launch technique:
Use appropriate force, avoiding too much or too little (insufficient for climb).
Follow through with the motion, rather than throwing downward.
Important
Precautions:
Avoid hand launching with low throttle to ensure sufficient takeoff power. Immediately take control of the ailerons after launching to prevent the aircraft from rolling out of control.
6.3.2 Runway Takeoff
Select
ACRO Mode.Throttle to 60%-70% to maintain moderate acceleration.
Maintain directional stability to avoid yawing out of control during taxi.
Once the aircraft has sufficient speed, slowly pull up the pitch to ensure smooth liftoff.
Important
Precautions:
Ensure sufficient takeoff distance to avoid stalling from excessive pitch-up in a short distance.
Takeoff into the wind to increase lift and avoid crosswind effects.
Monitor flight attitude to prevent excessive pitch-up or rapid banking.
6.4 In-flight Testing
1. Control surface test:
- After successful takeoff, switch the flight mode to
ANGLE Modeto check if the aircraft automatically corrects its attitude.
Important
If the aircraft's attitude is abnormal, switch to ACRO mode to land, and check the control surfaces under ANGLE Mode.
2. Level flight test
- Keep the throttle at 45%-55% and check if the aircraft can maintain level flight without any signs of diving or climbing.
Important
If the aircraft dives or climbs, you need to recalibrate the level—use AUTOLEVEL to perform level calibration, making the flight controller parallel with the wings.
For detailed information on how to use AUTOLEVEL, refer to this article: https://docs.corewing.com/plane/inav/settings/fc/autolevel-autotune.html
AUTOLEVEL needs to be used in conjunction with the primary mode and can be combined with ANGLE mode. For modification method, refer to the AUTOTUNE setting in flight mode settings.
3. Auto-tuning:
- Switch the flight mode to
AUTOTUNE Modeto perform automatic tuning.
Important
For detailed information on how to use auto-tuning, refer to this article: https://docs.corewing.com/plane/inav/settings/fc/autolevel-autotune.html
4. Flight data check:
- Observe the
OSDdata to confirm that GPS, heading, altitude, ground speed, voltage, and current are all normal.
Important
If abnormal data is detected, land promptly and check the equipment!
5. Return-to-home (RTH) function test:
- Switch the flight mode to RTH to test if the aircraft returns to the takeoff/arming point and circles around it.
Important
If the flight attitude is abnormal in RTH mode, promptly switch to ACRO or ANGLE and check the RTH parameter settings!
6. Pre-landing check:
Confirm battery remaining to ensure sufficient power for landing.
Observe wind direction and choose an upwind landing direction.
Technical Support QR Code
