ArduPilot T 尾布局固定翼调参指南(APP 版)
重要
此 APP 调参教程仅适用于 CoreWing 飞控,其他厂商飞控暂不支持!!!
重要
CoreWing APP 下载连接:https://www.corewing.com/website/download
一、飞行原理介绍
倒 T 型尾翼(Conventional Tail)是固定翼飞行器最常见的尾翼布局之一,由 水平尾翼(Horizontal Stabilizer)和垂直尾翼(Vertical Stabilizer)组成。其特点是水平尾翼安装在机身后部,低于主翼,而垂直尾翼则位于机身中央,形成类似倒置的 "T" 形结构。
倒 T 型尾翼的布局设计,使得 水平尾翼位于机身下方,相比 T 型尾翼,它具有更直接的气流影响,从而带来以下特点:
更低的迎角依赖性:气流能够更稳定地作用于尾翼,减少大迎角飞行时的失速风险。
更直接的俯仰操控:水平尾翼更接近主翼气流,升降舵响应更直接,控制更线性。
抗风性更强:相比于高位的 T 尾布局,低位尾翼受侧风干扰更小,着陆时更加稳定。

二、设备准备
必要设备:
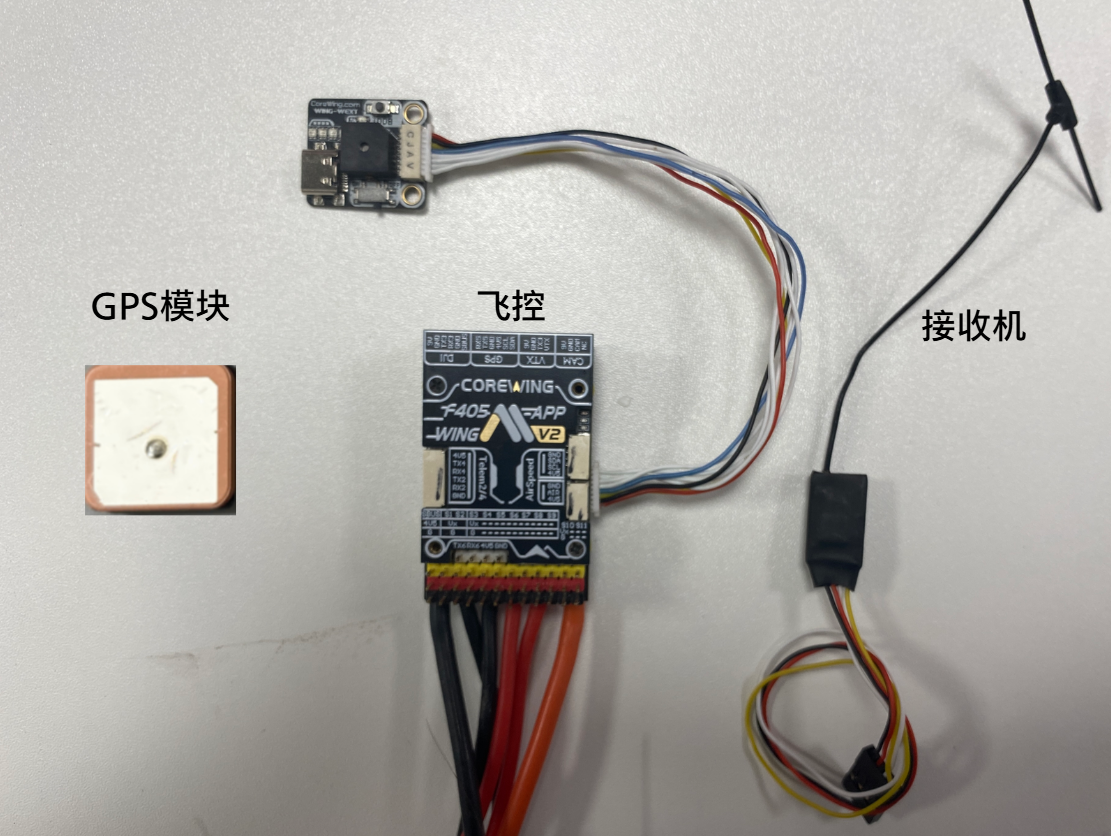
1)飞控: CoreWing F405 WING V2。
2)遥控器: 以 RadioMaster Boxer / RadioMaster TX16S 遥控器为例。
3)接收机: 以 SpeedyBee ELRS Nano 2.4G RX 接收机为例。
4)GPS 模块: 以 北征 BZ-251 GPS 模块 为例。
5)电机: 朗宇 2212 980KV,适用 肥翁,仅供参考。
6)电调: FLYCOLOR 45A,适用 肥翁,仅供参考。
7)舵机: 使用 9g 金属数字舵机,适用 肥翁,仅供参考。
8)电池: 使用 6S1P 4000mah 电池,适用 肥翁,仅供参考。
9)桨叶: 使用 8 寸双叶桨或三叶桨,适用 肥翁,仅供参考。
选装设备:
1)模拟图传: 以 SpeedyBee TX 1600 图传和 RunCam Phoenix2 SE V2 摄像头 为例。
2)高清图传: 以 DJI O4 AIR UNIT 图传 为例。
3)空速计: 建议使用数字空速计。

重要
CoreWing APP 的 AP 专家调参介绍可参考该文章:
https://docs.corewing.com/plane/software/corewing-app/corewingapp-aptuning.html
如何更新飞控的固件-使用 Mission Planner 地面站:https://docs.corewing.com/plane/beforetuning/mp-fw-update.html
如何更新飞控的固件-使用 INAV 地面站:https://docs.corewing.com/plane/beforetuning/inav-fw-update.html
三、初始设置
3.1 加速度计校准
重要
注意:进行加速度计校准时务必将飞控从机舱内取出,到平整桌面进行校准,以提高校准准确性,保证飞行稳定!
使用数据线或电池给飞控以及无线板供电。
点击必要硬件。
点击加速度计校准。
点击开始校准。
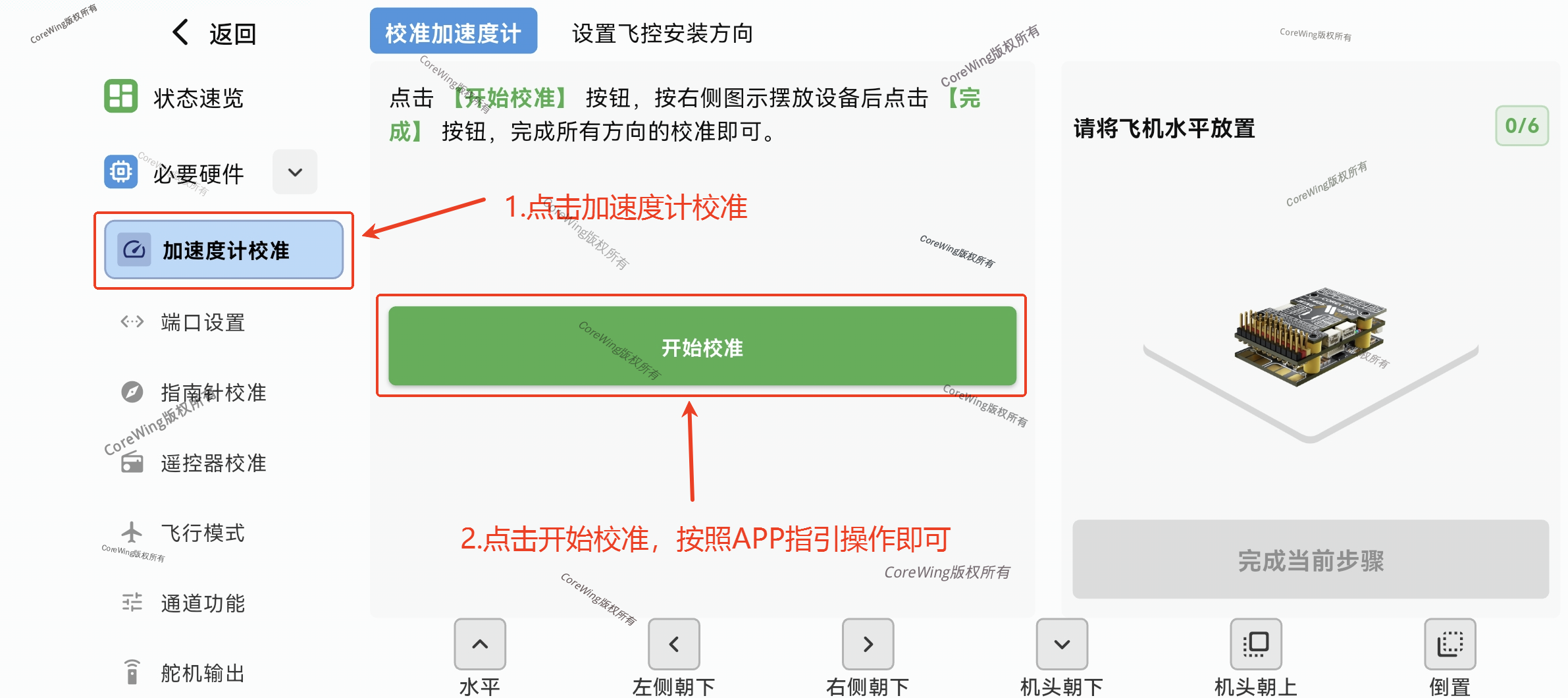
- 具体操作流程请跟随 APP 指引:
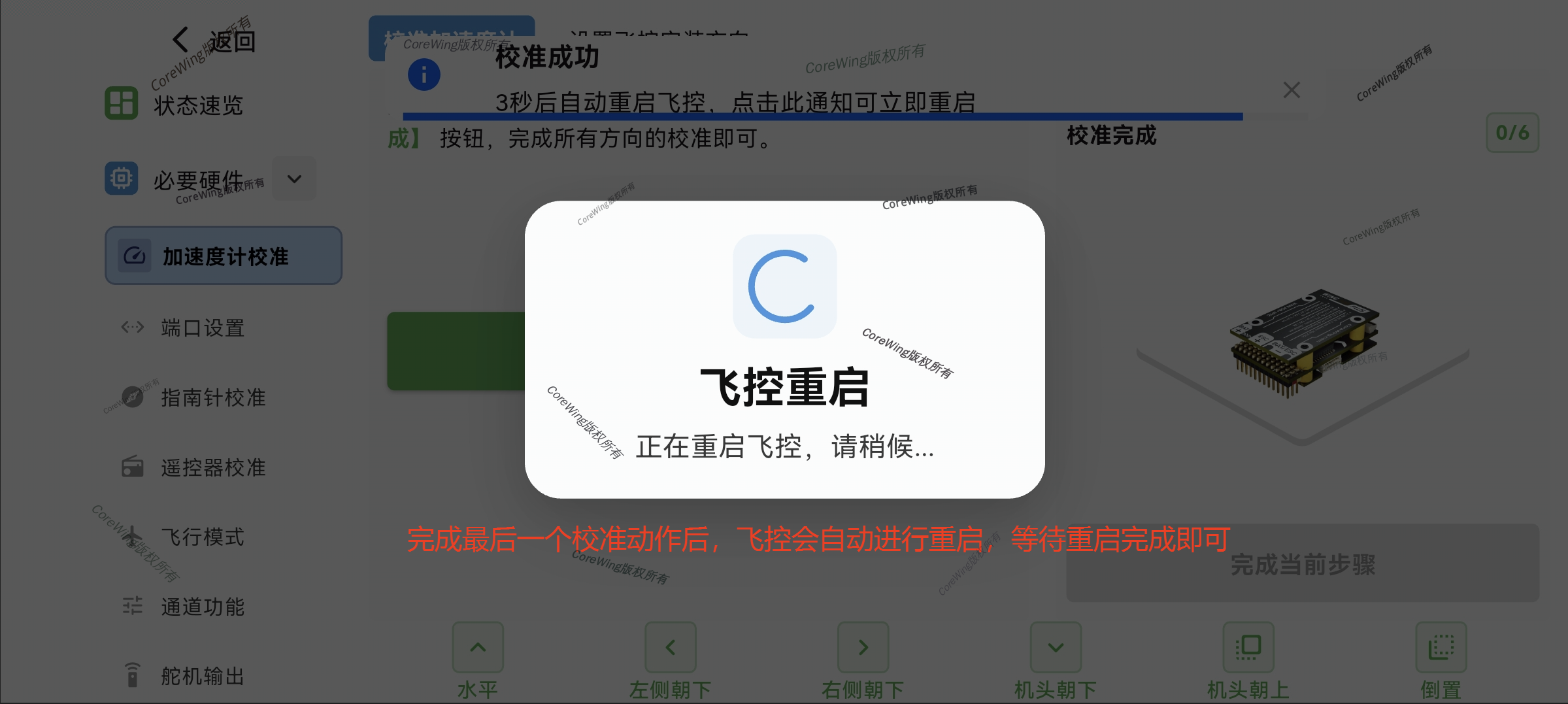
重要
完成最后一个校准动作后,APP 会自动重启飞控。
重要
在使用过程中温度和气候变化比较大、陀螺仪在遭受了严重的撞击、更换了传感器等情况,需要对加速度计进行重新校准!
3.2 遥控器设置及飞行模式设置
重要
导航至 MDL/MIXES 页面,检查遥控器 CH1-CH4 是否为以下设置,如不一致,请修改混控。

3.2.1 解锁通道设置
1.遥控器设置
选择一个 两段位开关
导航至
MDL/MIXES页面,将其混控配置为CH5

2.地面站设置
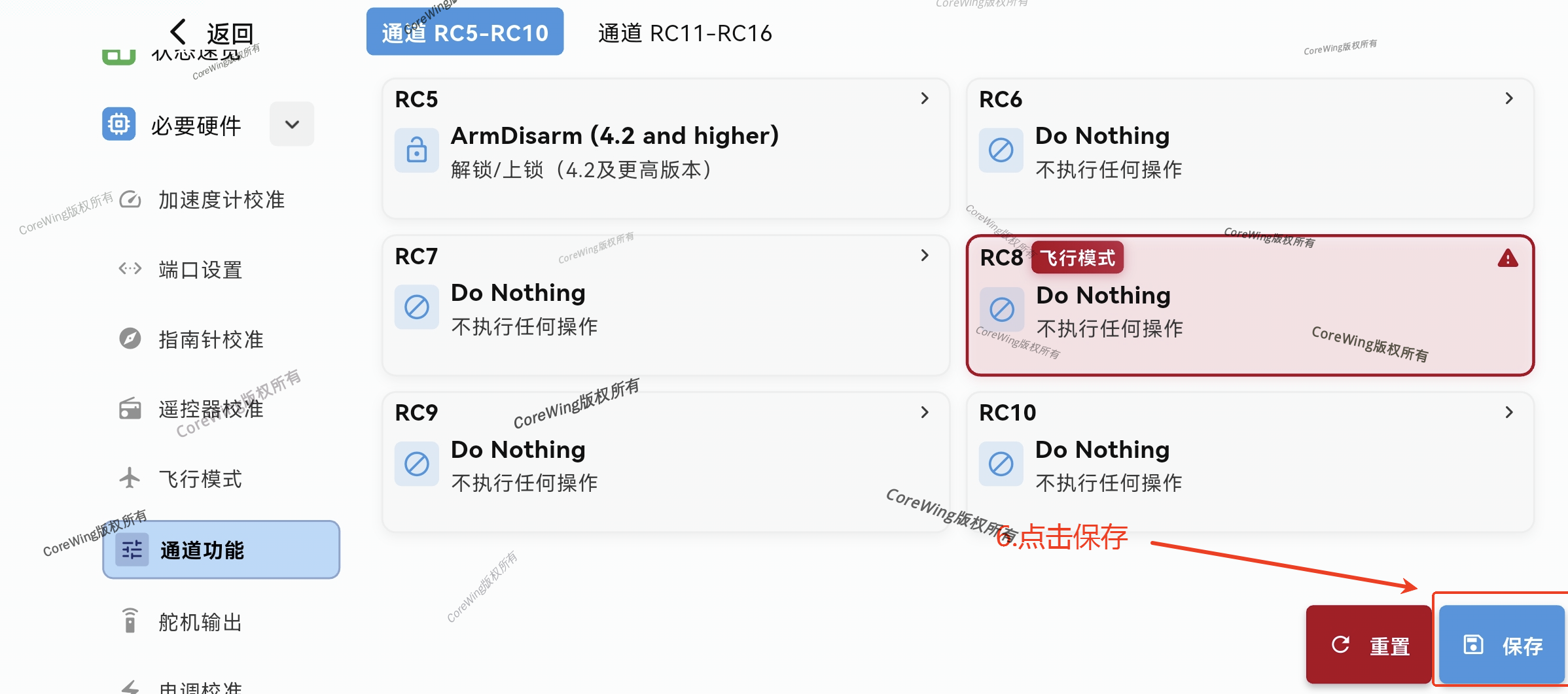
点击 通道功能,选择
RC5
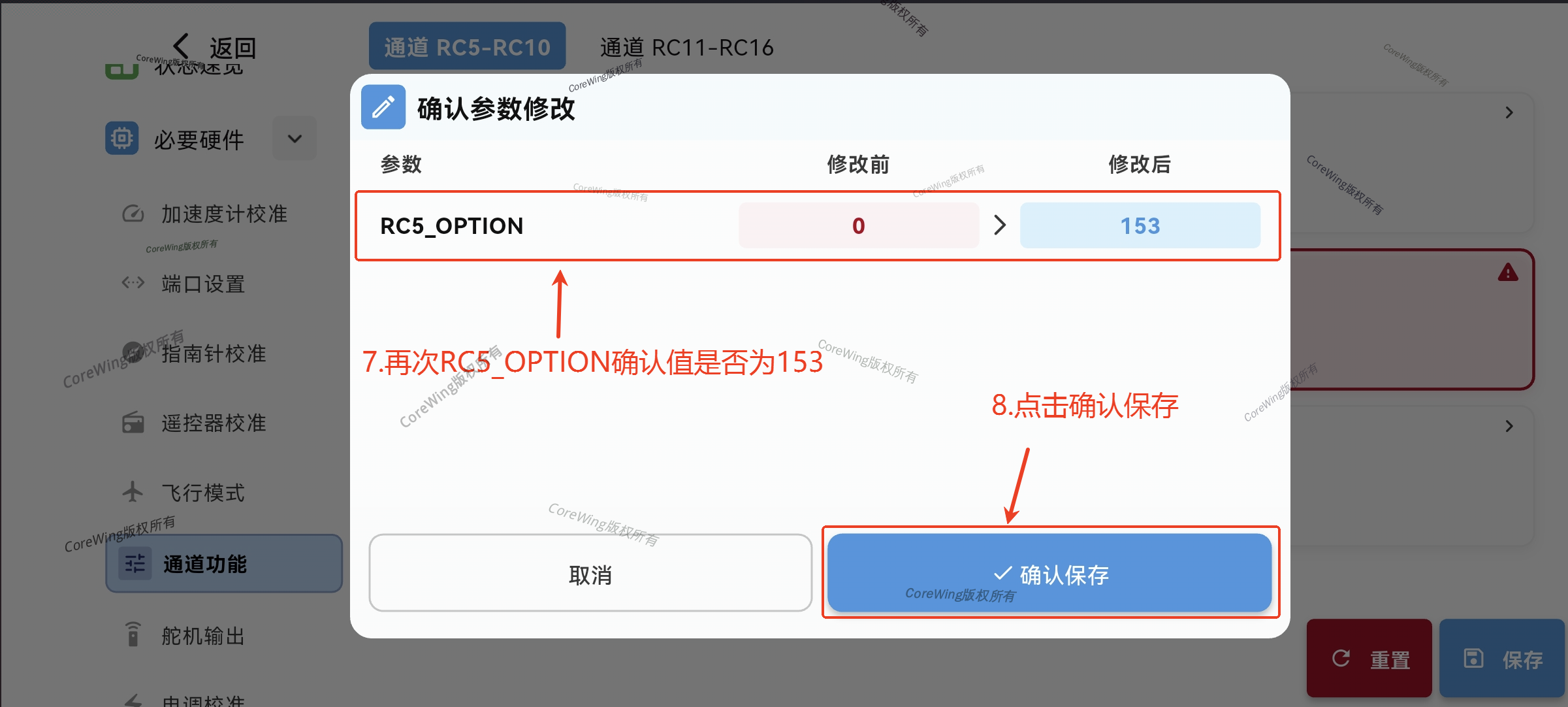
点击 常用功能,找到
ArmDisarm(4.2 and higher),值为153点击确认
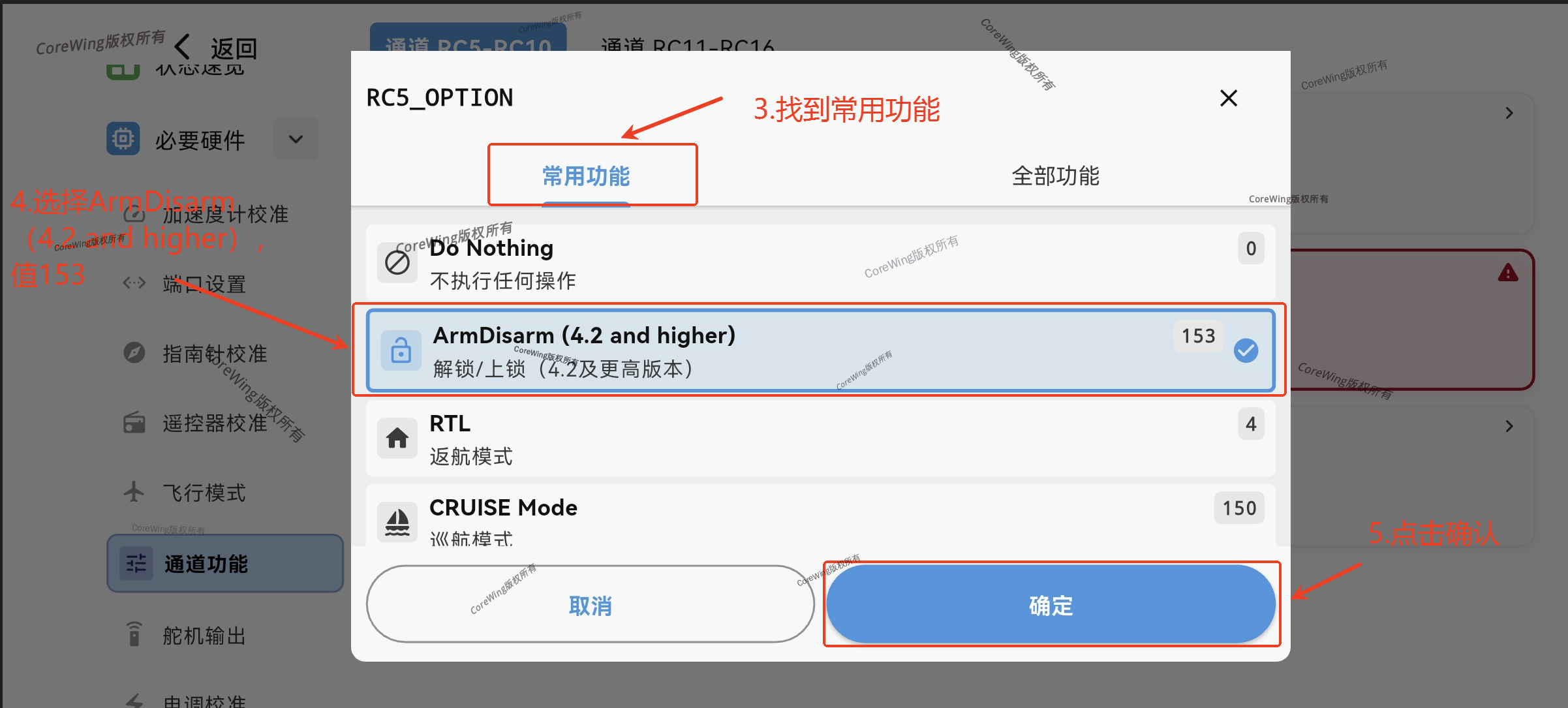
点击右下角的保存,确认参数修改后为 153,点击确认保存
重要
如何设置解锁与上锁详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/fc/arming-disarm-setup.html
3.2.2 返航通道设置
1.遥控器设置
选择一个 两段位开关
导航至
MDL/MIXES页面,将其混控配置为CH6(可按实际情况进行设置,仅供参考)

2.启用返航拨杆设置
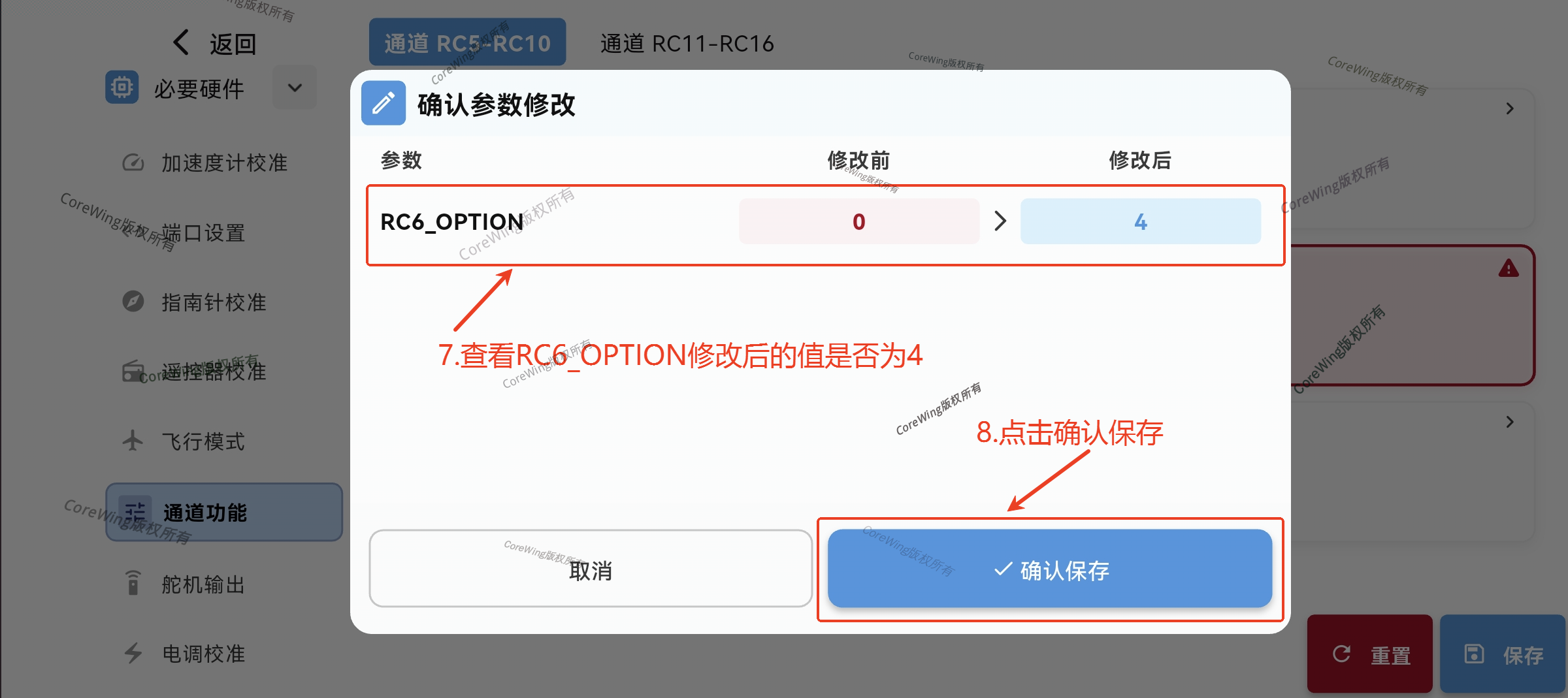
- 点击 通道功能,选择
RC6

点击 常用功能,找到 RTL 返航模式,值为
4点击 确认

- 点击右下角保存,确认参数修改后为 4,点击 确认保存

3.2.3 飞行模式设置
1.遥控器设置
选择一个 三段位开关,设置三段飞行模式开关
导航至
MDL/MIXES页面,将其混控配置为CH8

2.地面站设置
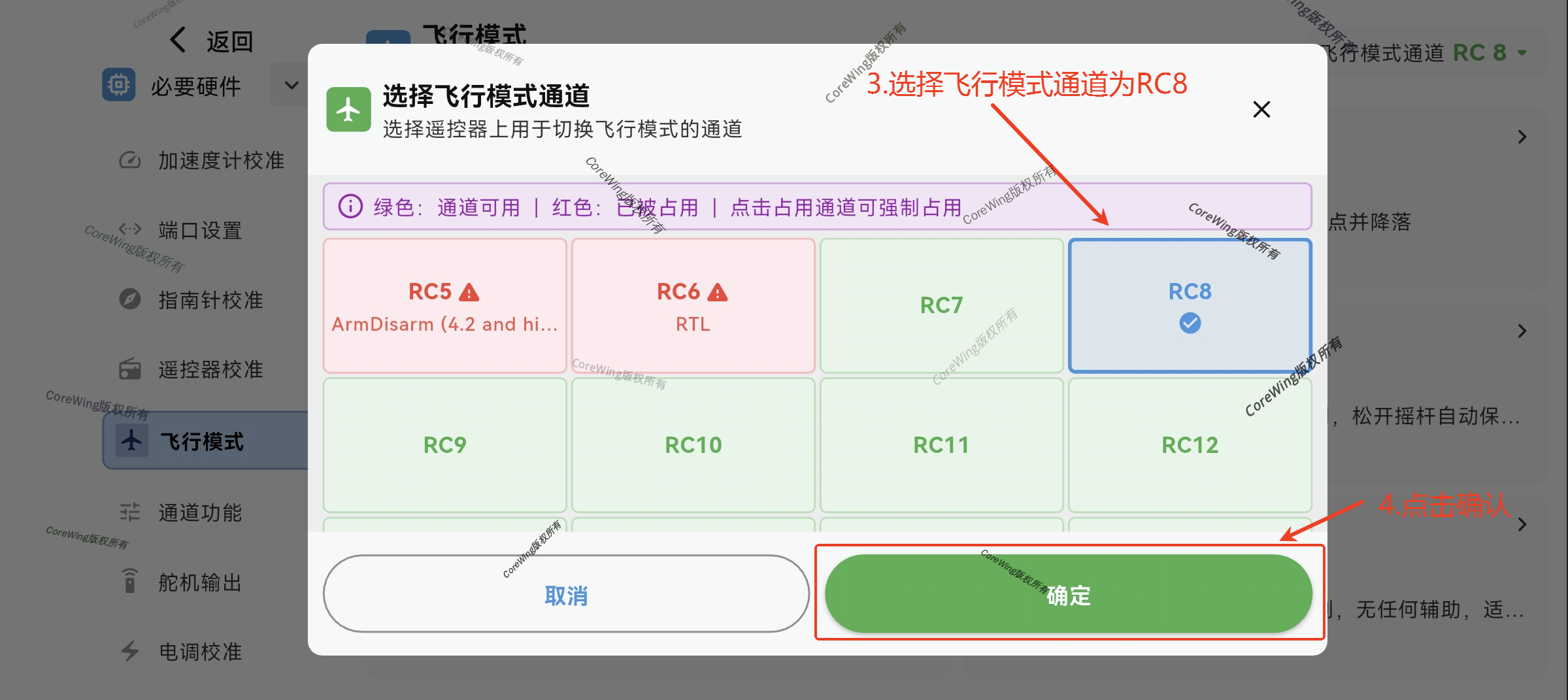
飞行模式通道设置:
点击 飞行模式,点击 飞行模式通道
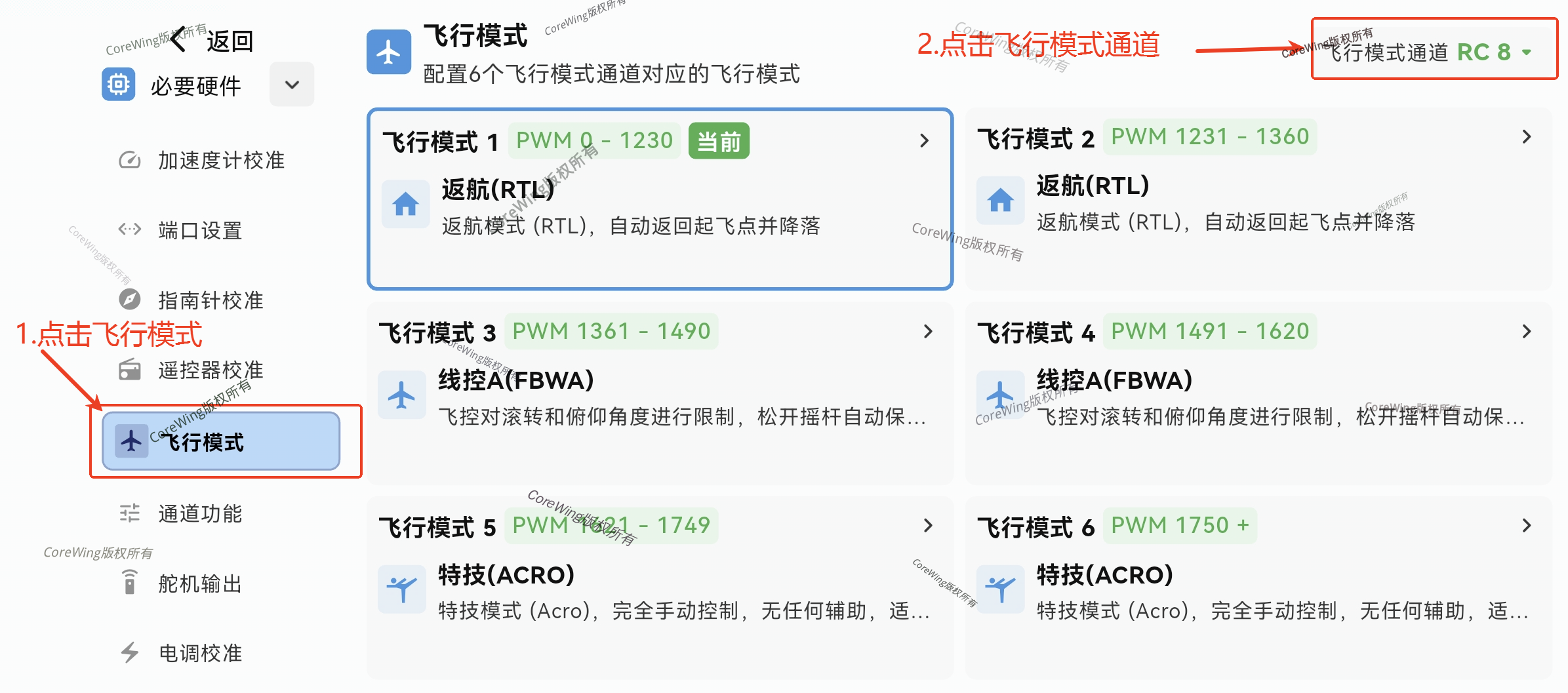
设置飞行模式通道为
RC8,点击 确认
飞行模式设置:
飞行模式 1、2 设置为
ACRO;飞行模式 3、4 设置为
FBWA;飞行模式 5、6 设置为
AUTOTUNE。设置完毕后点击保存

重要
如何设置六段飞行模式开关详细内容可参考:https://docs.corewing.com/plane/ardupilot/settings/rc/sixpos-switch.html
重要
飞行模式介绍详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/fc/flight-modes.html
3.2.4 遥控器校准
重要
1.请将遥控器与接收机进行对频,再进行以下操作。
2.ELRS 接收机如何与遥控器对频可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/rc/elrs-bind.html
- 点击遥控器校准,点击 RC2 的反向,将俯仰反向

- 点击确认
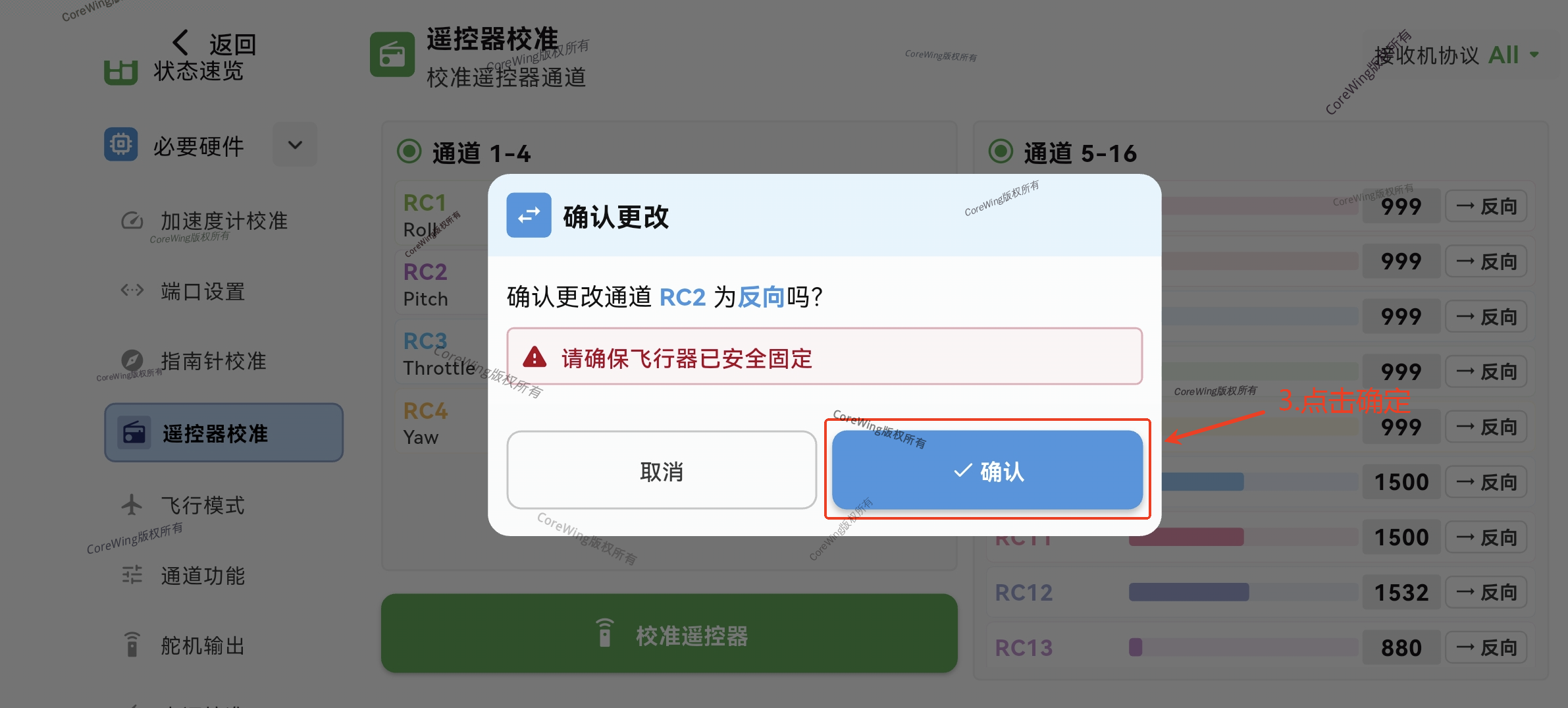
- 点击保存

- 确认
RC2_REVERSED修改后的值为1,点击确认保存

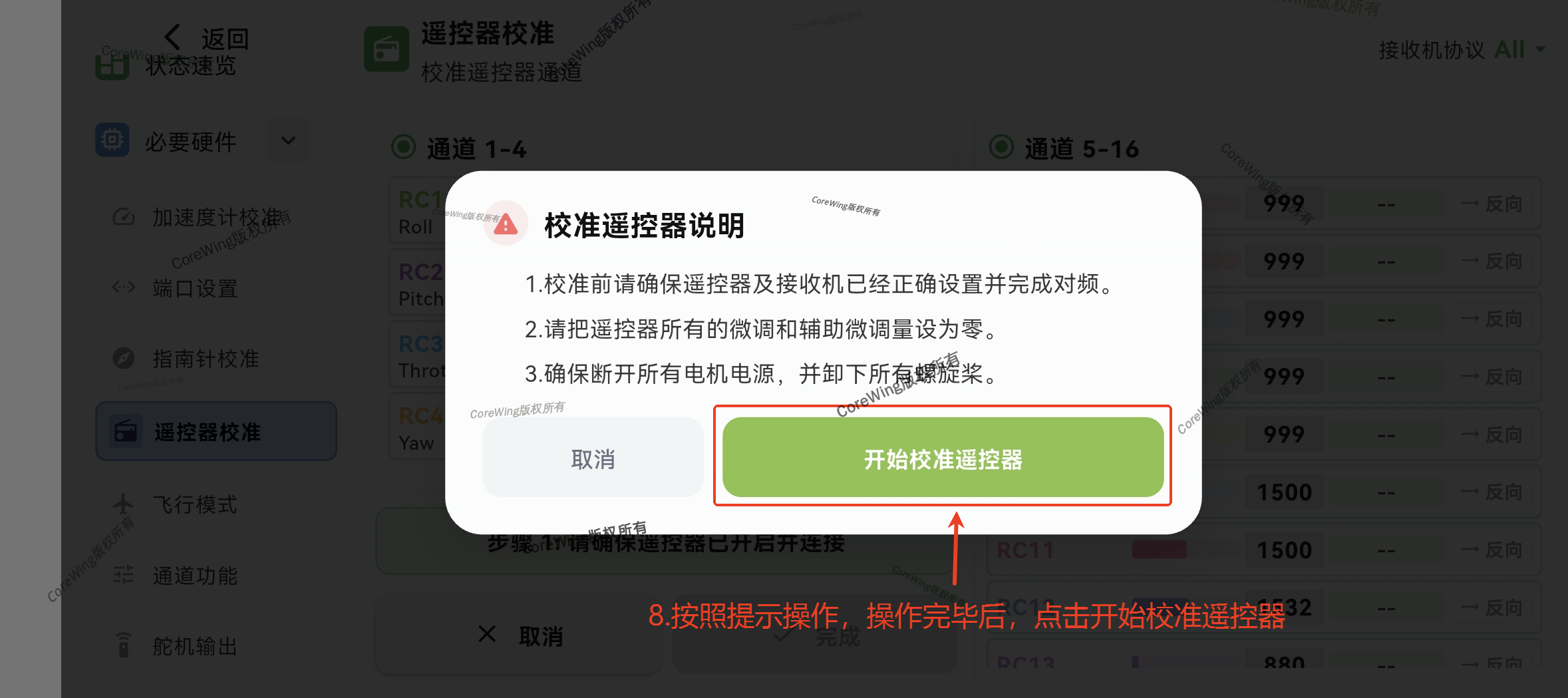
- 点击 校准遥控器

- 按照提示操作,操作完毕后,点击 开始校准遥控器
- 按照提示,移动所有摇杆和开关到极限位置,操作完毕后,点击完成

- 将摇杆居中,油门杆处于最低位,点击确定
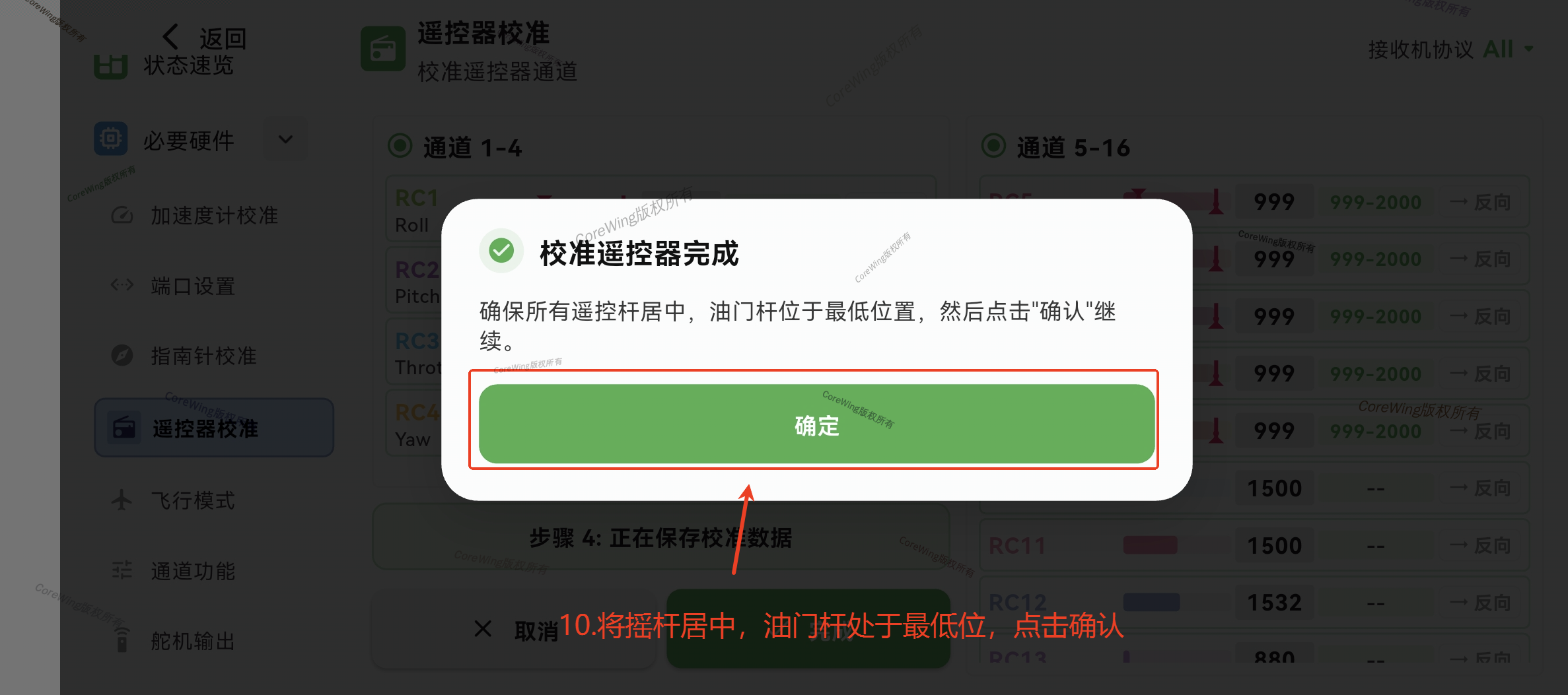
- 点击确认保存即可

四、设备装机
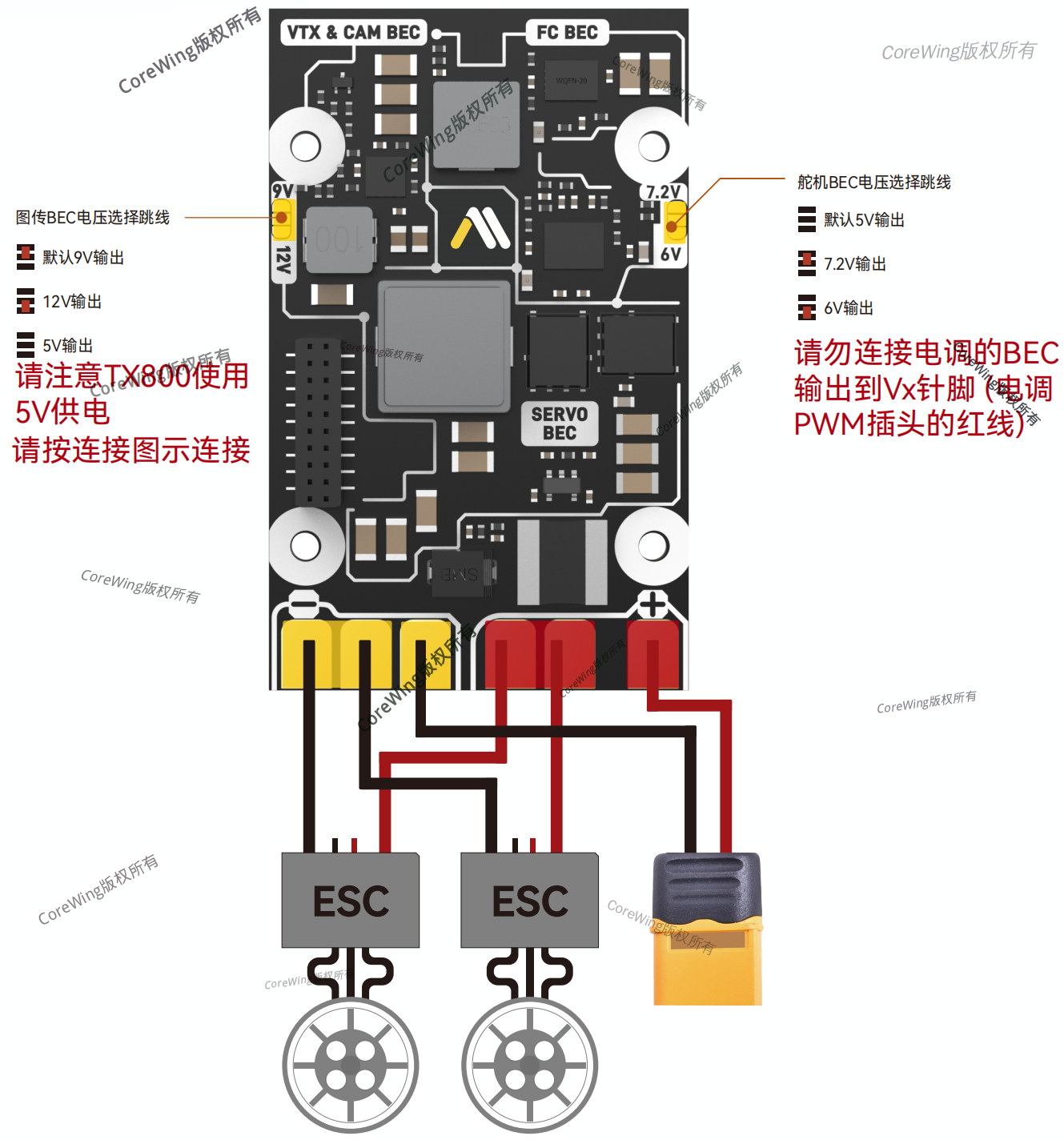
4.1 飞控接线
- 电源接线
重要
注意:
1.电源正极必须接入指定焊盘。
2.ESC指电调。
3.焊接时注意不要虚焊。
4.2 飞控安装
飞控应安装于飞机的重心位置,可参考下图进行安装:

重要
若需要调整飞控的安装朝向,可参考该文章进行设置:https://docs.corewing.com/plane/ardupilot/settings/fc/orientation-setup.html
4.3 外设安装与设置
- 外设接线
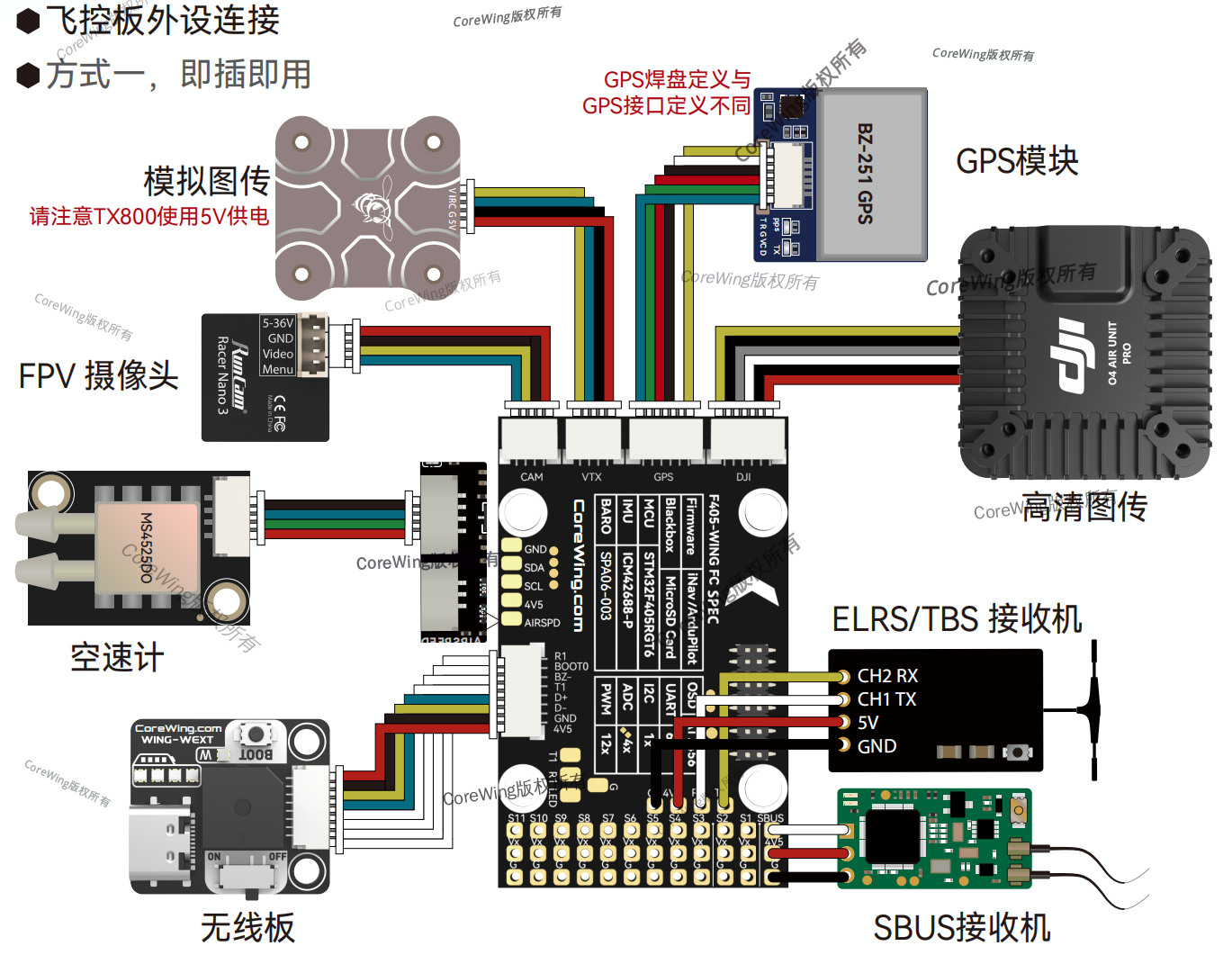
4.3.1 接收机安装与设置
装机位置如图所示, 将天线沿出舱外,使用胶布固定天线:

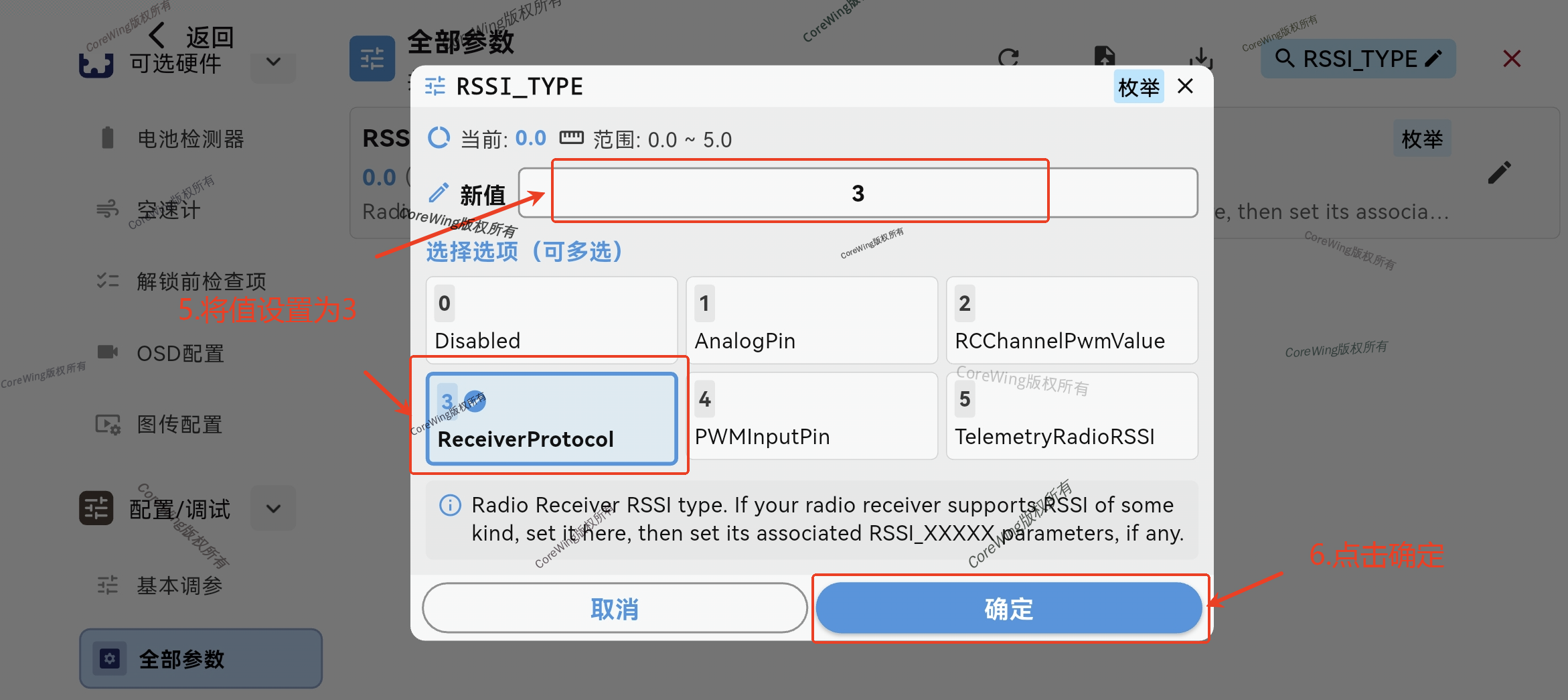
设置 RSSI_TYPE:
点击 配置/调试,点击 全部参数,点击搜索框
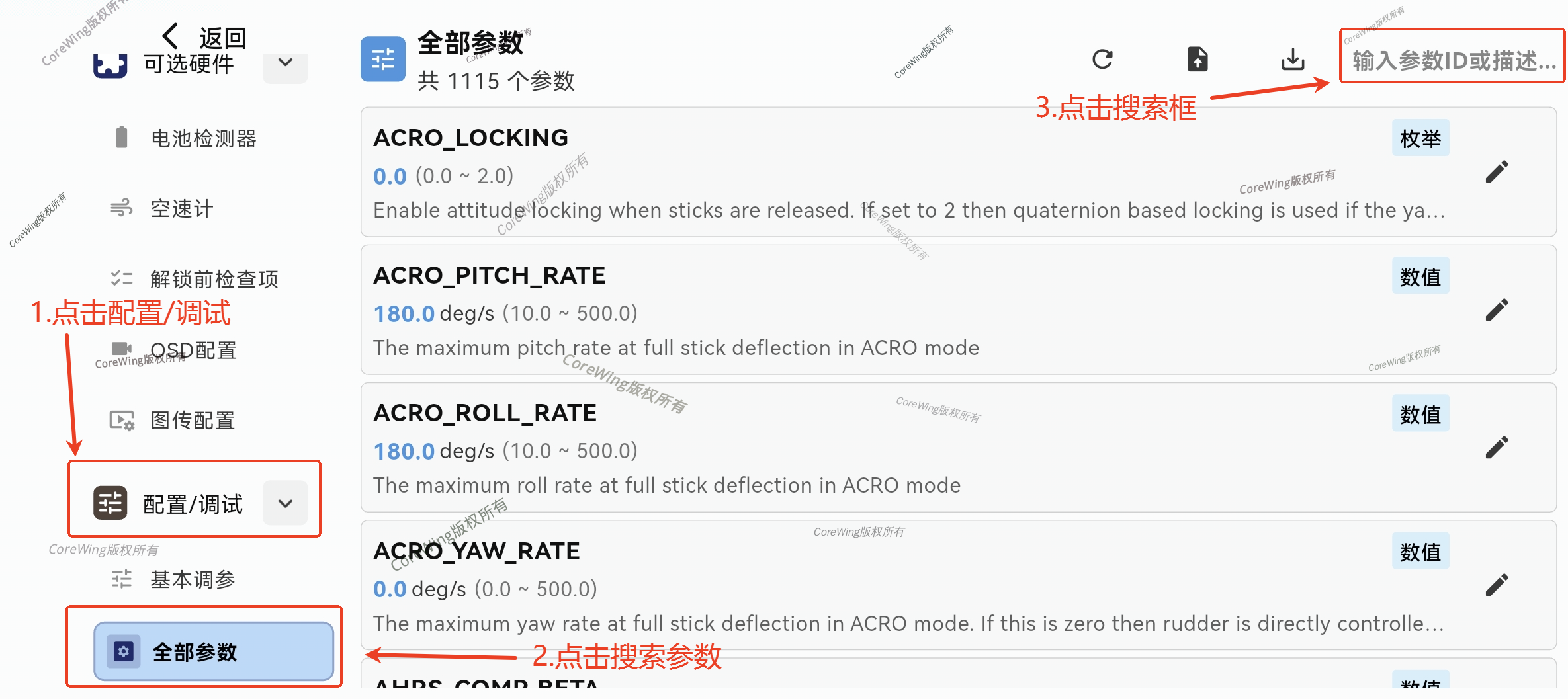
输入
RSSI_TYPE,将RSSI_TYPE的值修改为3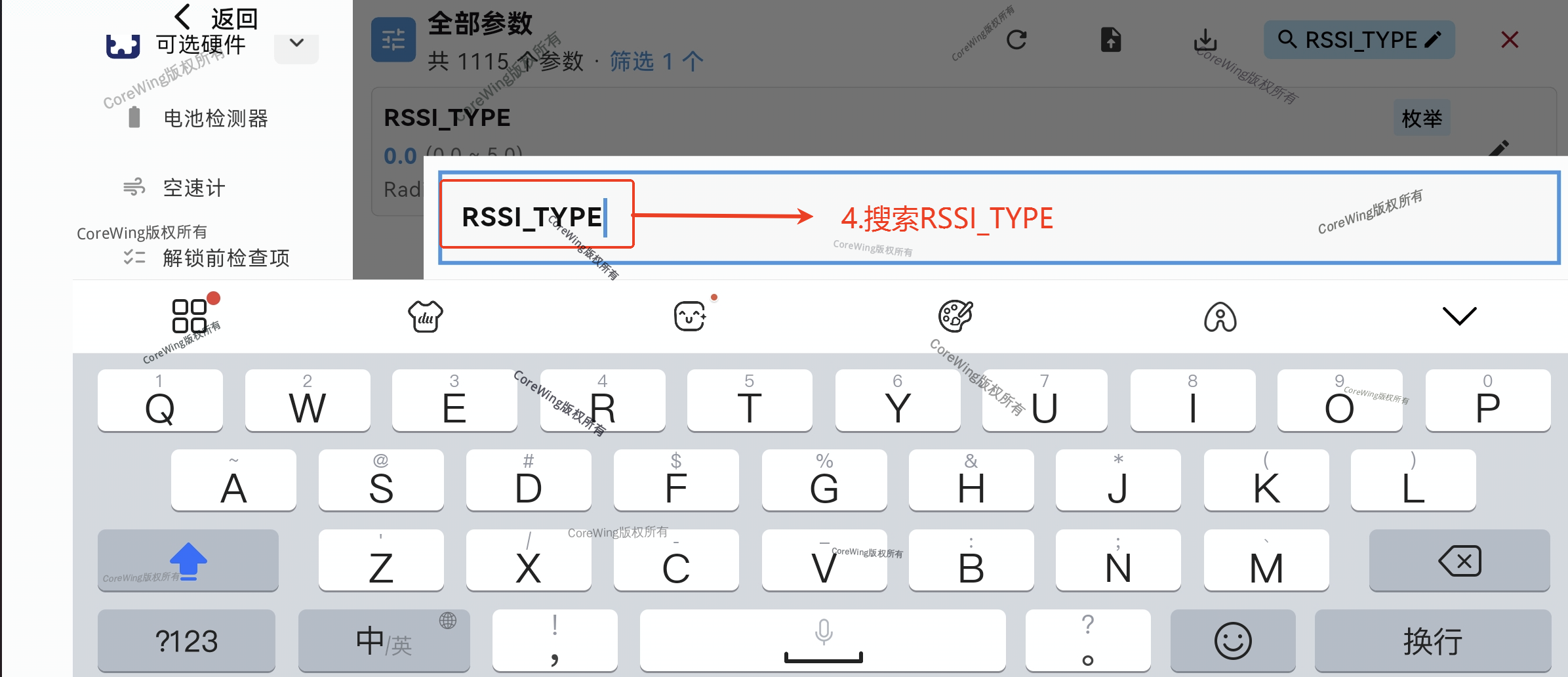
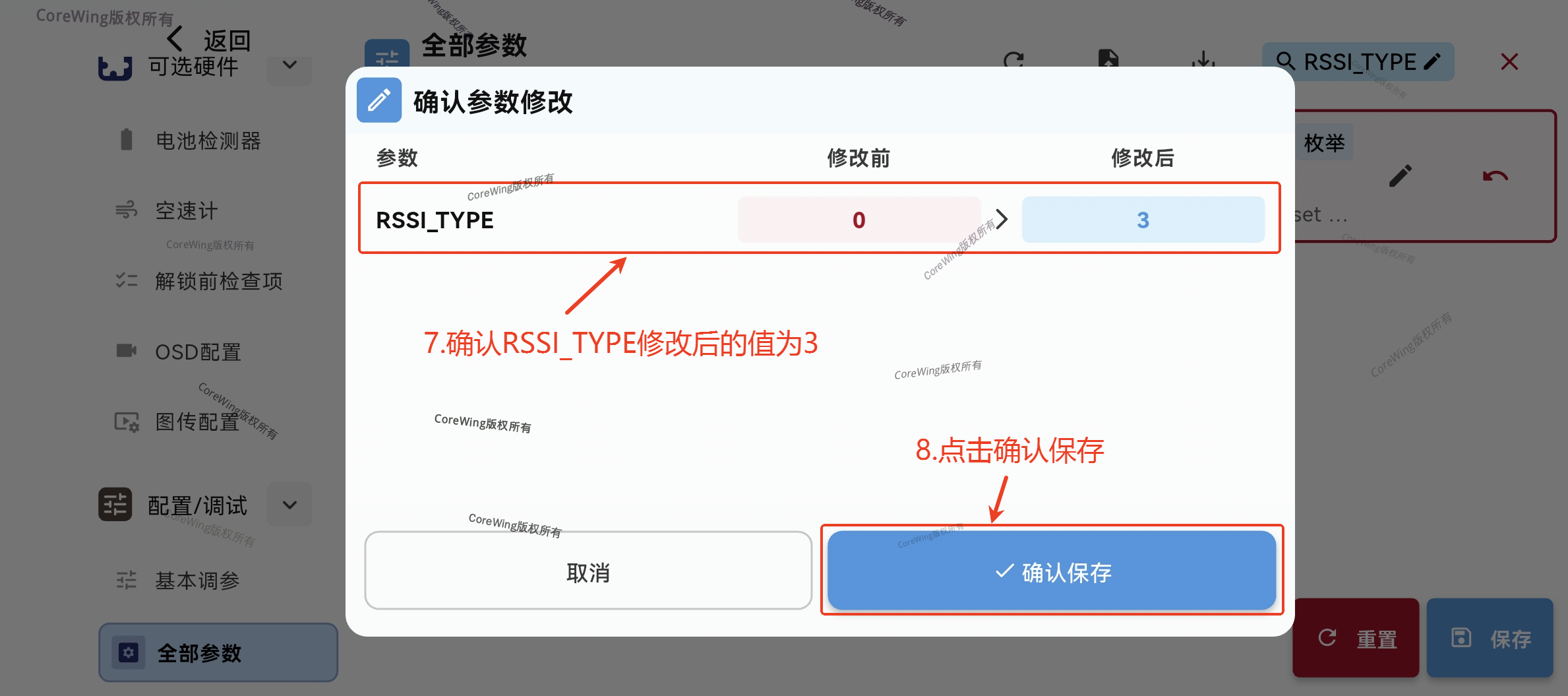
点击保存,确认修改后值为
3,点击确认保存

4.3.2 Servo Output 设置(舵机与电机设置)及舵面检查
重要
飞控自带 BEC,如电调也自带 BEC 需把中间电源线挑出来并做好绝缘,防止飞行途中晃动导致接触到导体,导致短路!!!
输出接线:

| 通道 | 输出 | 说明 |
|---|---|---|
| S1 | Aileron | 副翼 |
| S2 | Aileron | 副翼 |
| S3 | Elevator | 升降舵 |
| S4 | Rudder | 方向舵 |
| S5 | Throttle | 油门 |
| S6 | Throttle | 油门 |
- 点击 舵机输出,点击 切换机型
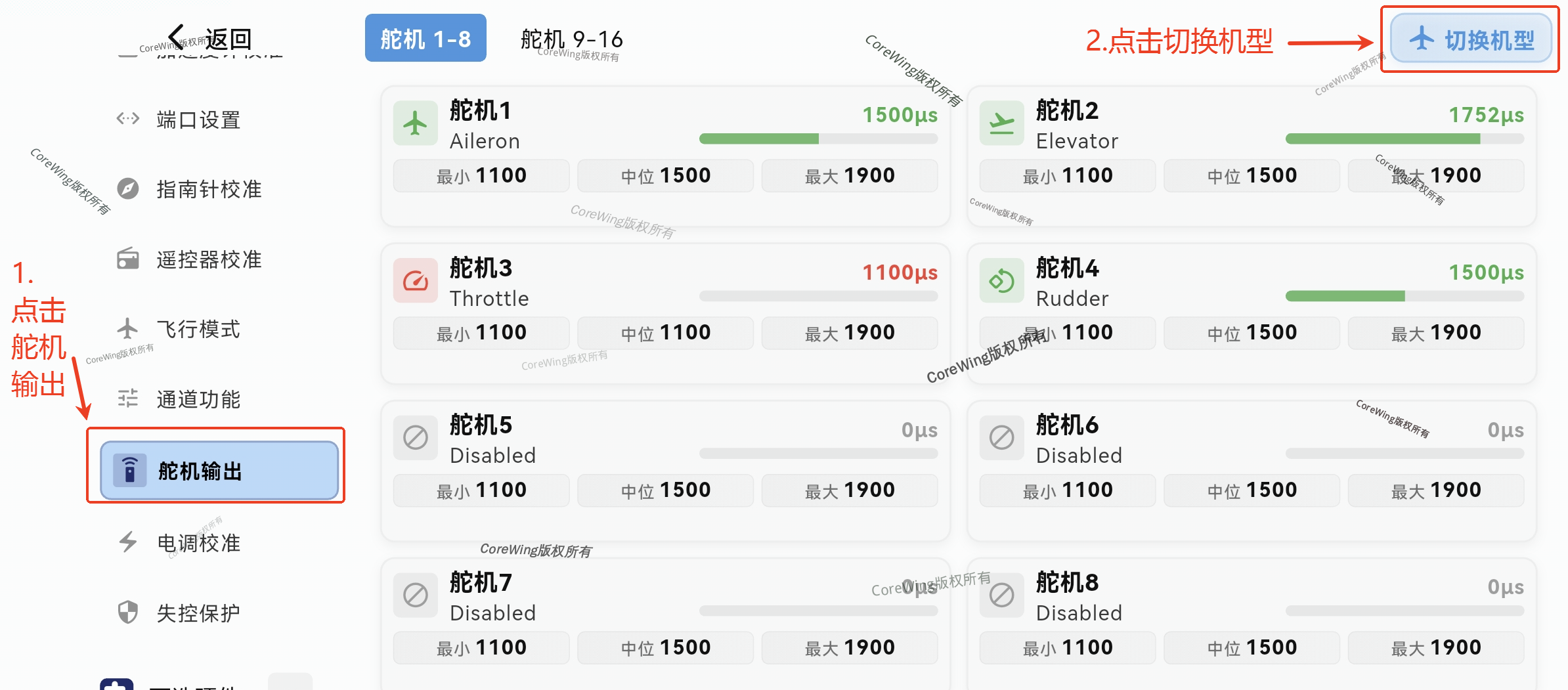
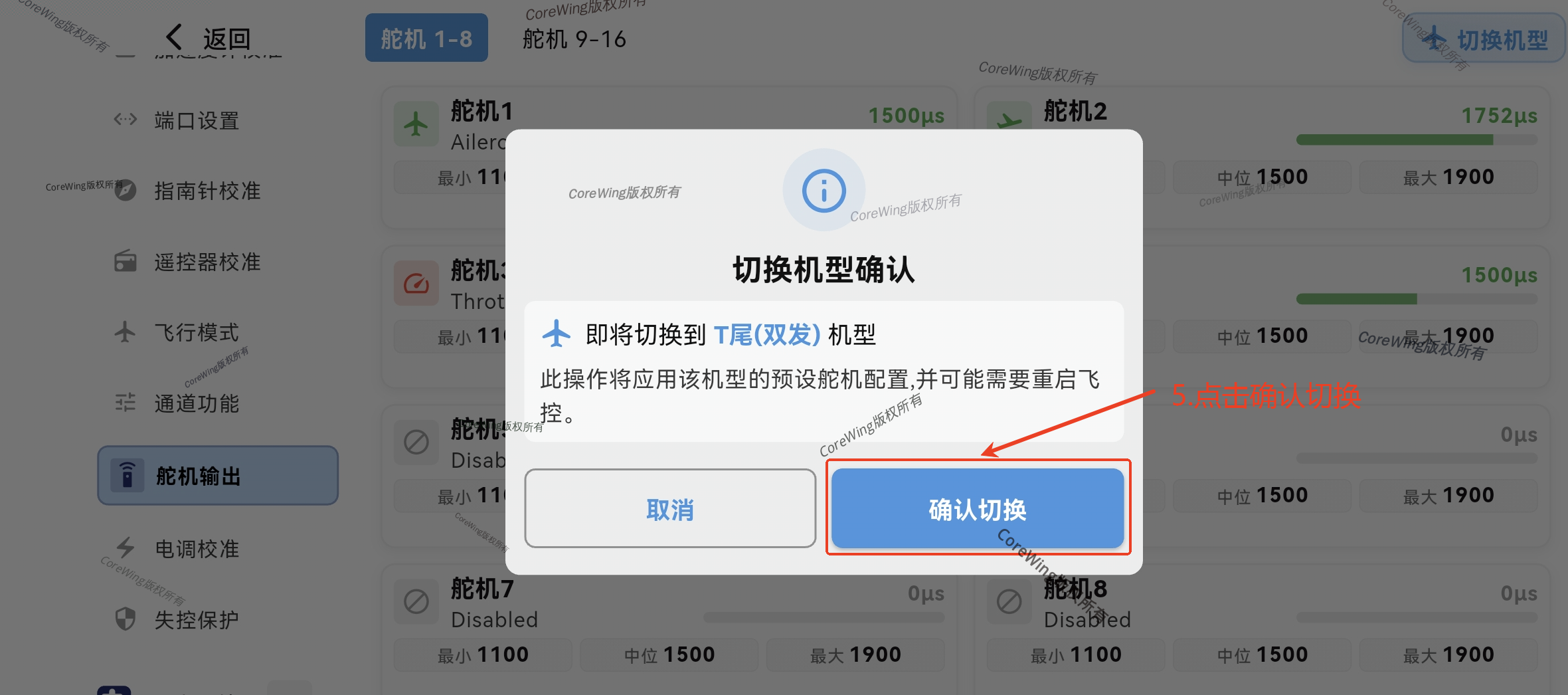
- 选择 T 尾(双发),点击确定,点击 确认切换

- 确认输出的混控和值没有问题,点击保存

- 点击 确认保存

- 等待 飞控重启 完成

重要
注意:
1.油门的 最小值和中位值 一致,请注意检查。
2.输出设置尽可能按照定时器分组进行设置,同类的设备放在同一组。定时器分组可查看飞控说明书 “Part5-针脚映射-ArduPilot 针脚映射” 部分。
舵面检查:
a.自稳模式下,舵面反馈检查
重要
飞行模式切换至 FBWA 模式
当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
当飞机抬头时,升降舵面朝下。
当飞机低头时,升降舵面朝上。
b.手动模式下,舵面反馈检查
重要
飞行模式切换至 ACRO 模式
当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
当向上打升降杆时,反馈为升降舵面朝下。
当向下打升降杆时,反馈为升降舵面朝上。
当向左打方向杆时,反馈为方向舵面朝左。
当向右打方向杆时,反馈为方向舵面朝右。
先检查自稳反馈是否正确,再检查手动反馈是否正确,若自稳反馈不正确,将错误的舵面通道勾选反向即可。

重要
自稳状态下,若遥控操作的方向舵正确,则自稳的方向舵反馈一定正确。若自稳反馈不正确请检查 遥控操作的方向舵反馈。
重要
如何确认舵面反馈是否正确详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/fc/dir-check.html
4.3.3 GPS 模块安装与设置
装机位置如图所示,模块底部使用 3M 胶固定, 确保模块安装牢固,否则会很影响飞行效果:
重要
安装时注意横平竖直安装,不要倾斜,否则无法正确设置安装角度。

重要
1.远离金属安装,例如:磁铁舱盖、金属拉杆等,否则会干扰罗盘。
2.远离接收机、舵机线、电机等设备安装,否则会干扰罗盘。
3.注意确认安装是否牢固。
4.不同模块的详细安装操作请参考其说明书。
4.3.4 一键配置图传
- 模拟图传安装:

- 模拟图传参数设置:
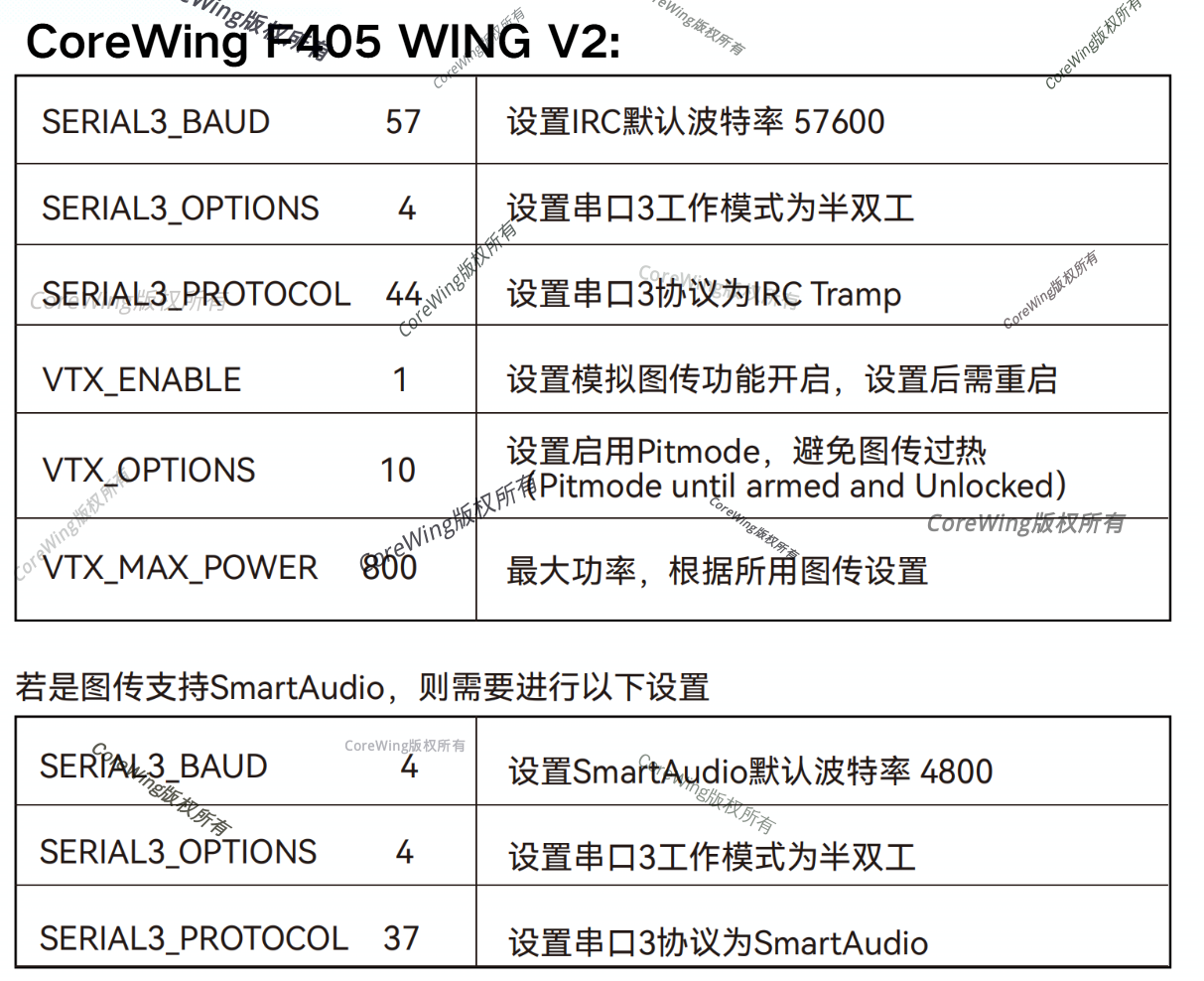
- 点击 图传配置,点击 模拟图传

- 选择协议以及画幅
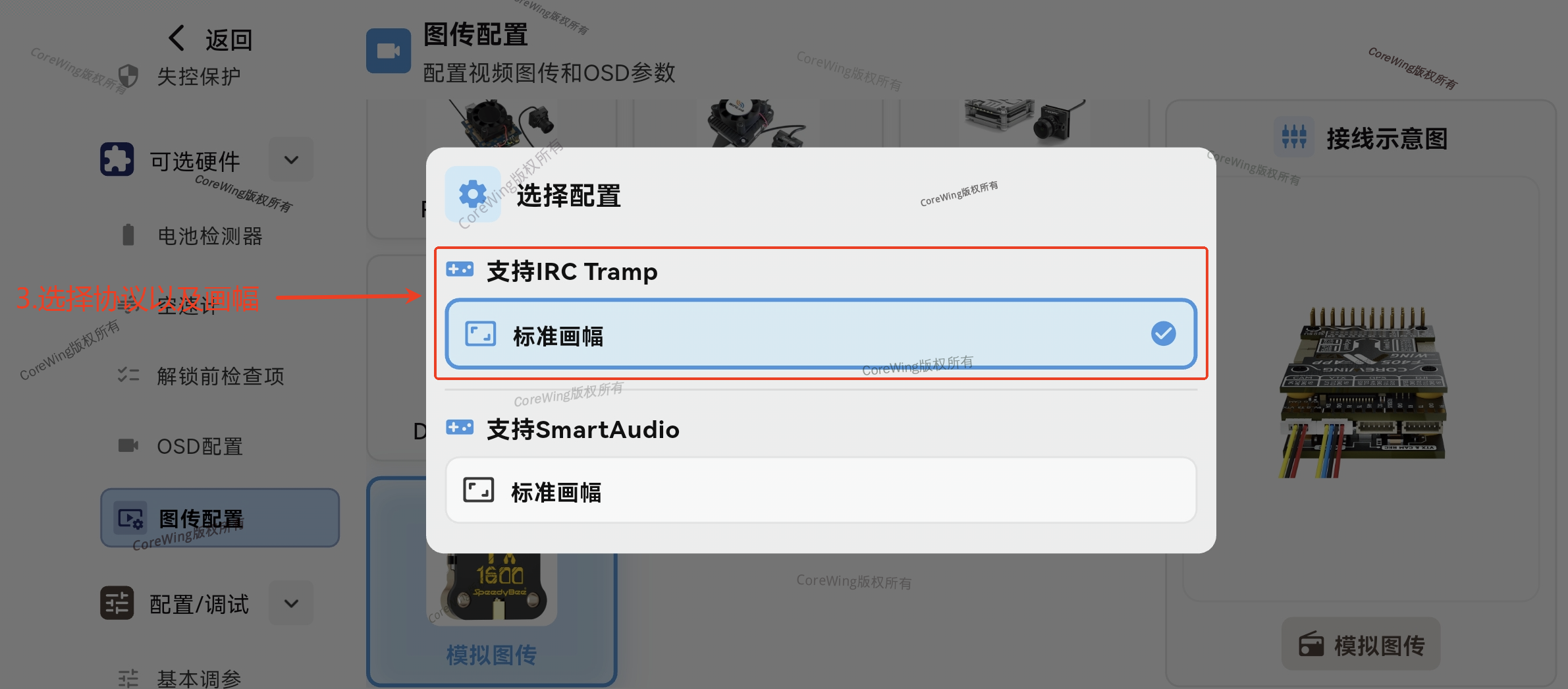
- 按照图示进行接线,点击保存

- 检查参数修改是否有误,点击确认保存
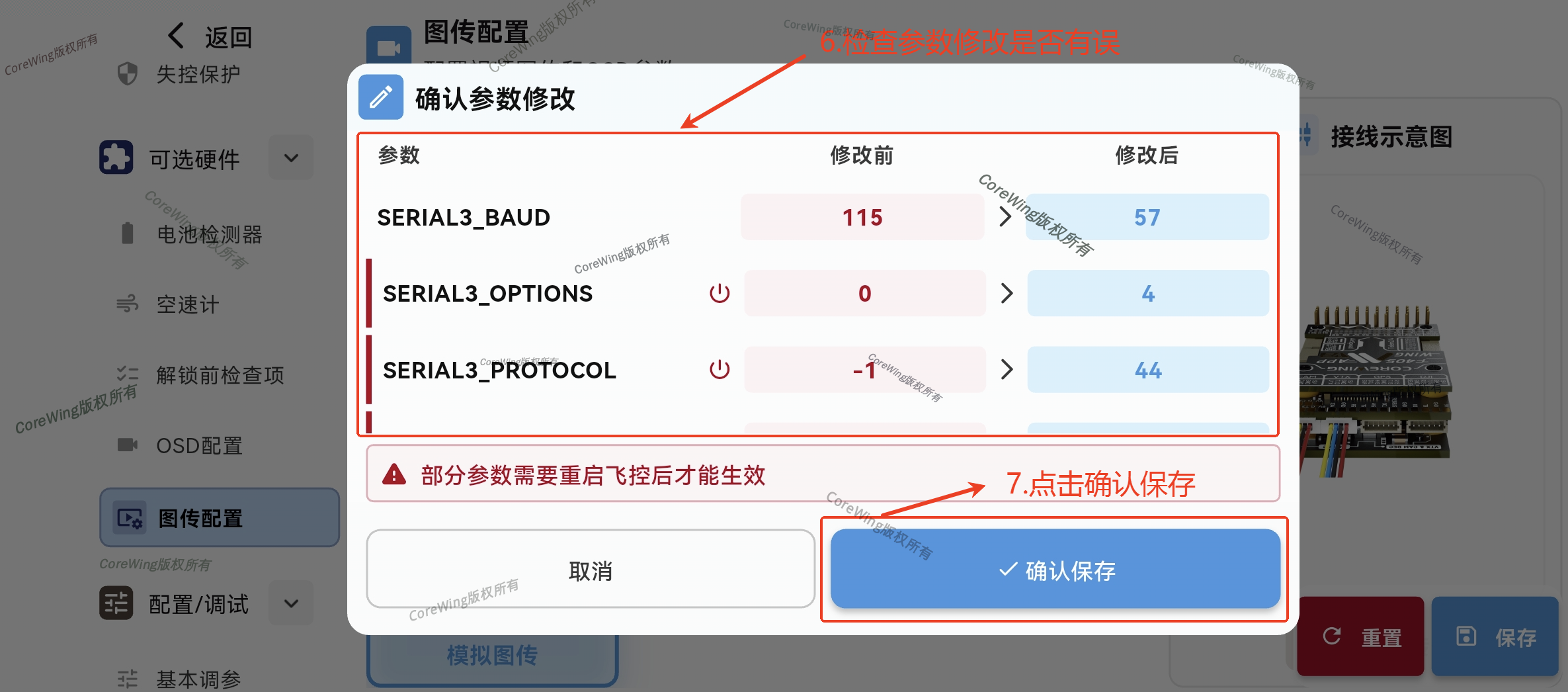
- 等待飞控完成重启即可

重要
模拟图传参数设置详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/vtx/analog-vtx/config.html
- 高清图传安装:

- 高清图传参数设置:
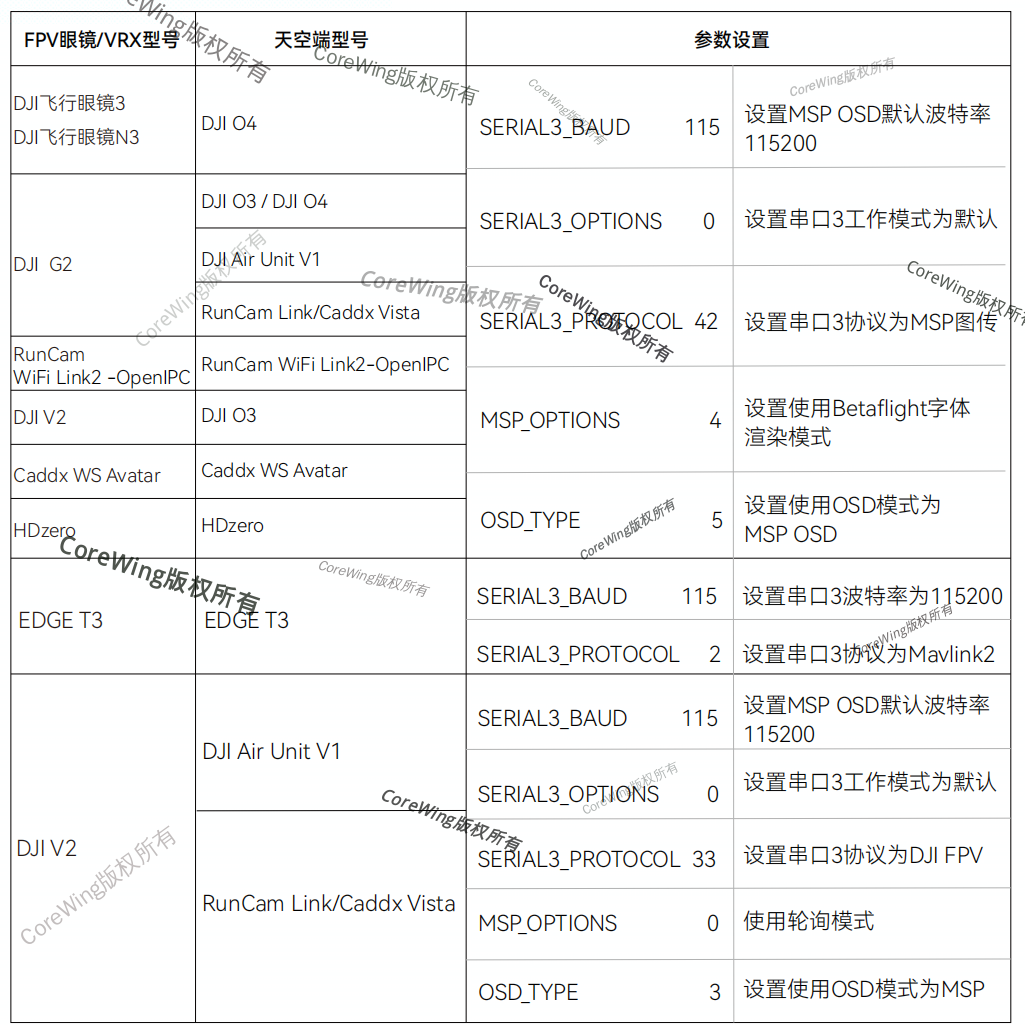
- 点击 图传配置,点击 高清图传

选择眼镜以及画幅

按照图示进行接线,点击保存

检查参数修改是否有误,点击确认保存

等待飞控完成重启即可

重要
如何设置 OSD 元素详细内容可参考该文章:
https://docs.corewing.com/plane/software/corewing-app/corewingapp-aptuning.html
4.3.5 空速计安装与设置
空速计安装位置参考:
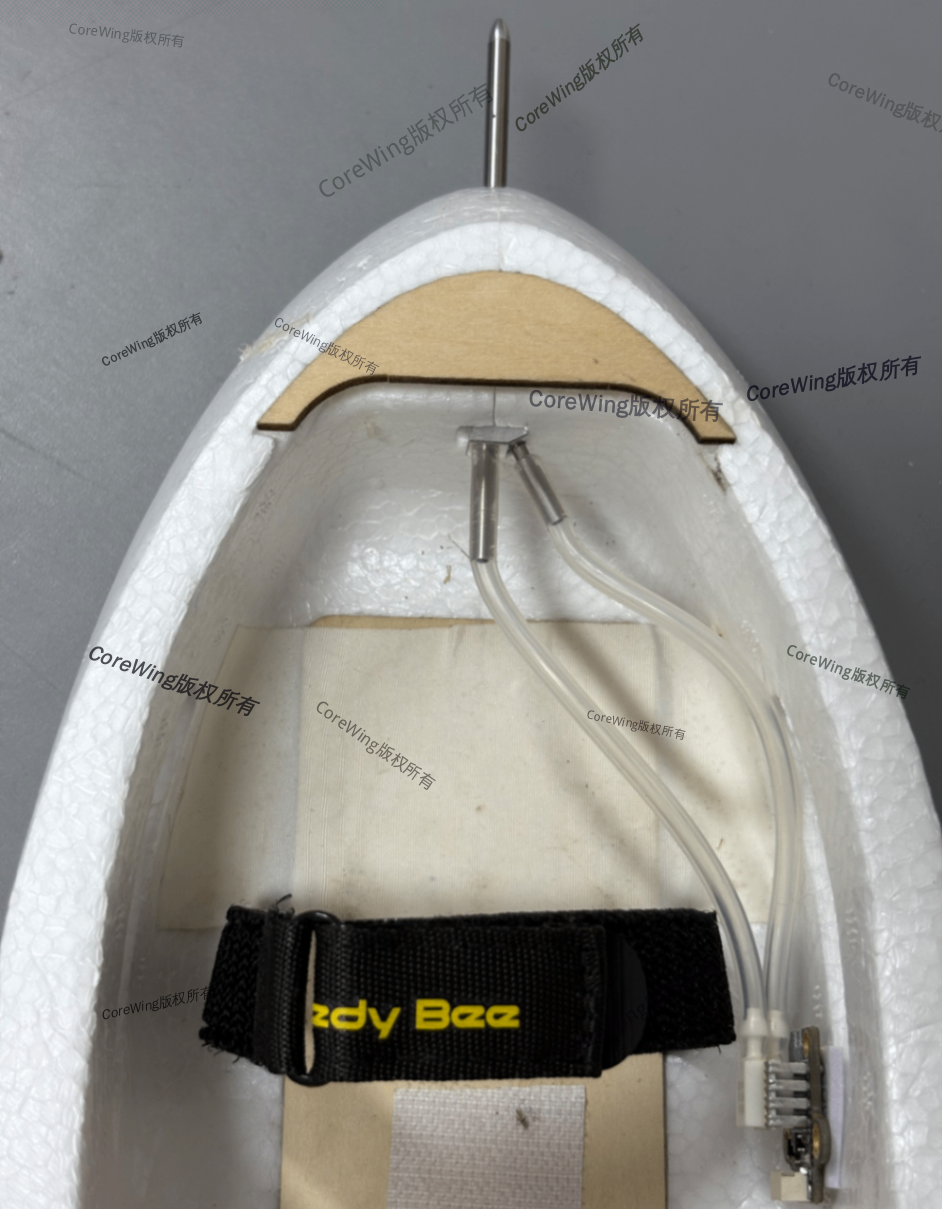
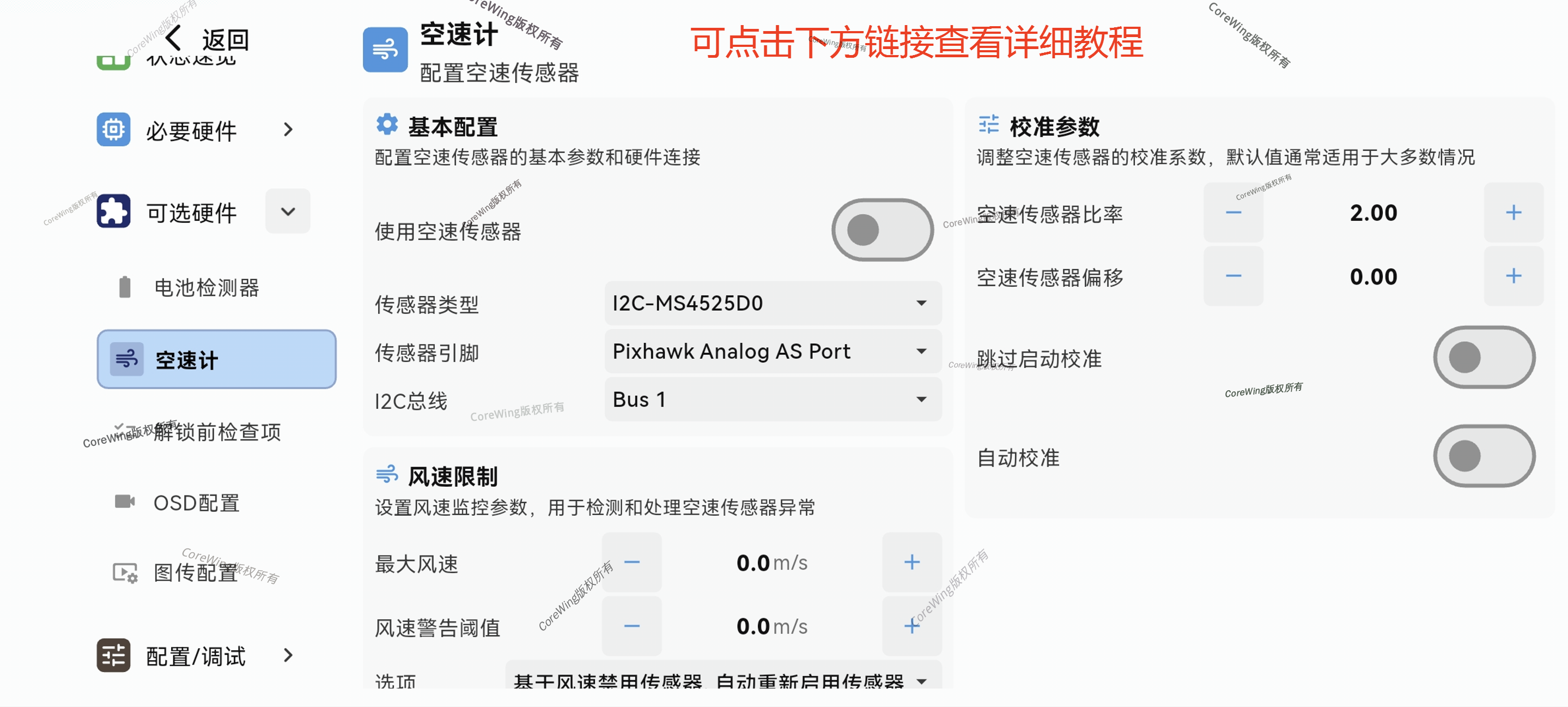
重要
空速计安装、参数设置及如何校准详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/airspeed/airspeed-setup.html
五、飞行前调试
5.1 电调校准
重要
确保电池已断开,接收机已对频,桨叶已卸除!
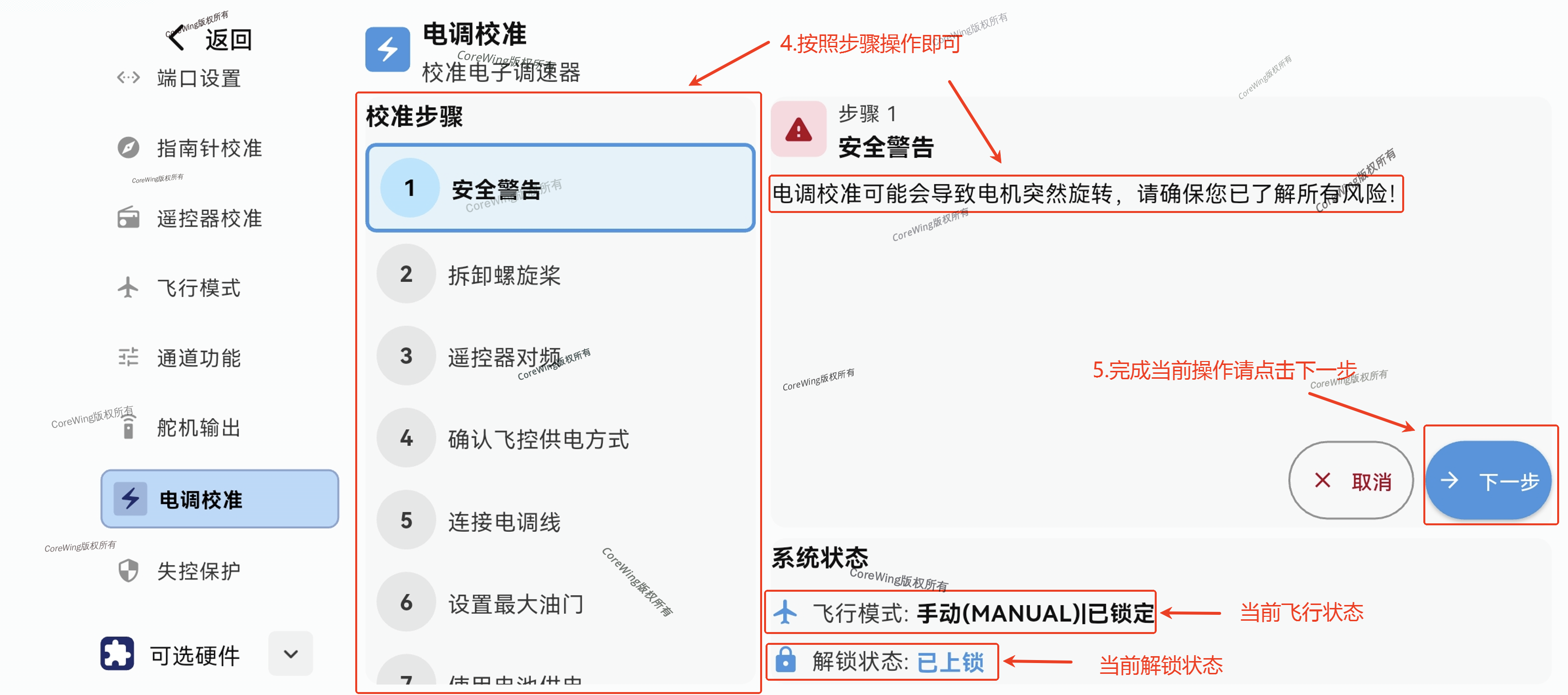
- 点击电调校准页面,阅读须知,阅读完毕点击我已了解,开始校准
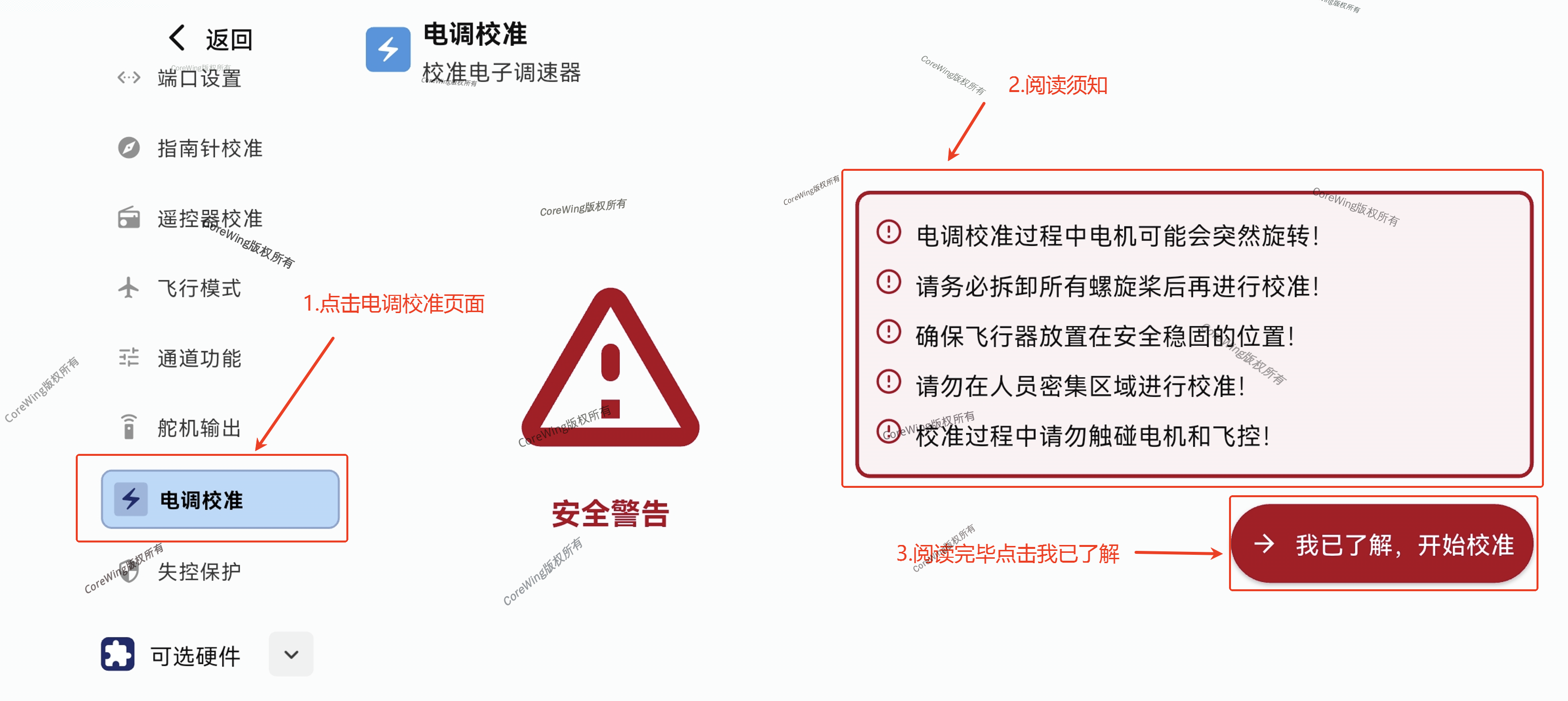
- 按照步骤操作即可,完成当前操作请点击下一步
电调响起提示音→马上将油门推至最低→电调提示音结束
BLHeli32/BLHeli_S 电调校准声:
接上电池等待 2 秒→“播放一首音乐”为油门最高点确认音→等待音乐播放完毕→将油门推到最低等待 1 秒→“播放另一首音乐,嘚-嘚-”为油门最低点确认音→校准完毕
PWM 电调校准声:
接上电池等待 2 秒→“哔-哔-”油门最高点确认音→将油门推到最低等待 1 秒,N 声短鸣声表示锂电池节数→“哔-”油门最低点确认音→校准完毕
轻推油门,电机立马转动,将油门从 0%推至 20%,查看油门是否线性。
若和上述效果有差异**,请断开电池,重新进行校准。**
重要
电调校准及 Dshot 协议开启详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/esc/esc-dshot.html
5.2 电机转向检查及桨叶安装
电机朝外转:面对机头,左电机逆时针转,右电机顺时针转。
电机朝内转:面对机头,左电机顺时针转,右电机逆时针转。
重要
若电机转向错误,请交换 任意电机 的三根电机线中 任意两根,即可调整转向。

5.3 罗盘校准
重要
校准时远离金属物体,如汽车、电动车、高压电塔;
在室外 GPS 信号良好(至少 8 颗星)时校准;
校准时尽量使用无线调参,避免 USB 线干扰;
如更换 GPS/罗盘模块,或调整飞控安装位置,必须重新校准。
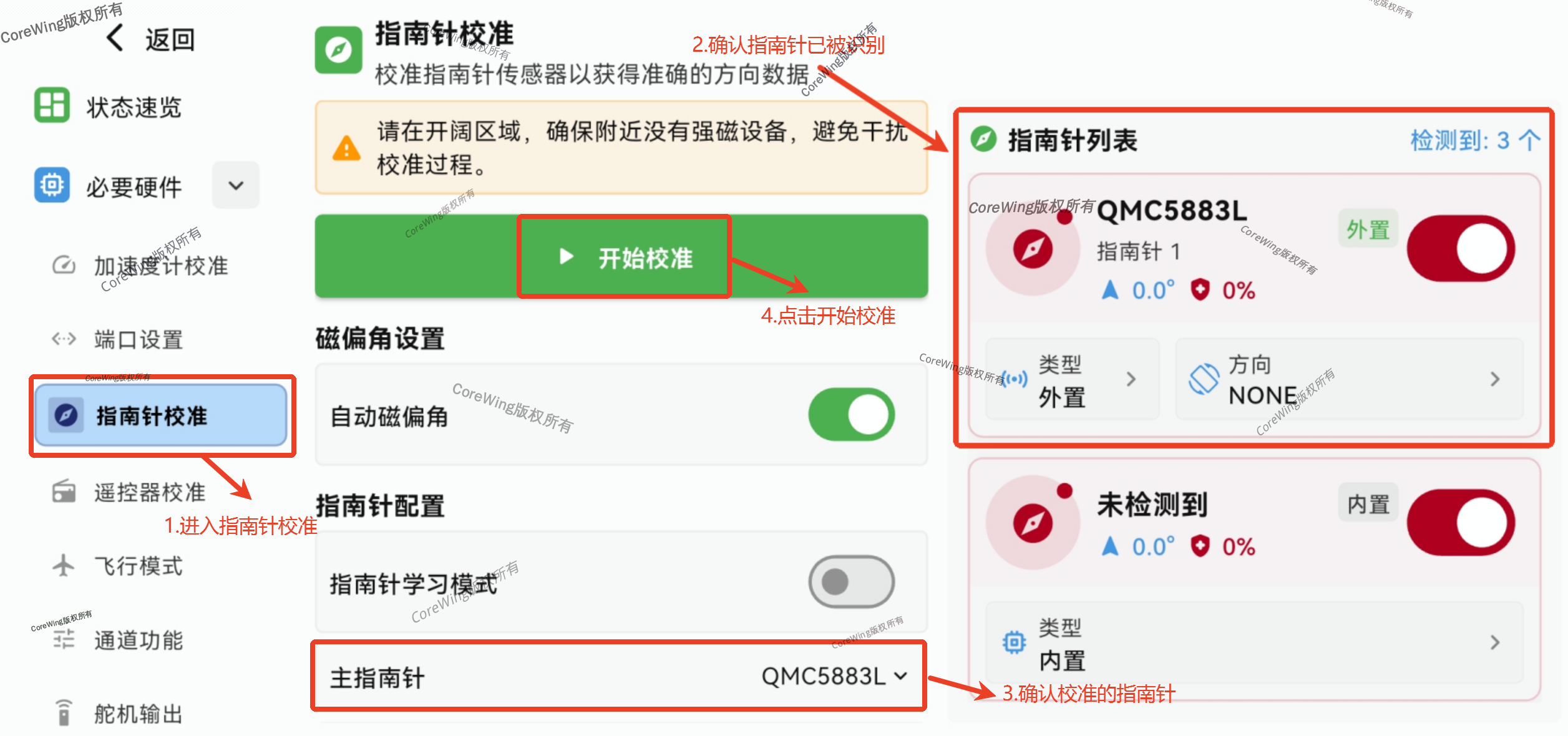
- 确认指南针已被识别,点击 开始校准
重要
如果指南针未被识别成功,接线也没有问题,请退出 APP,将飞控断电重启之后再次连接 APP
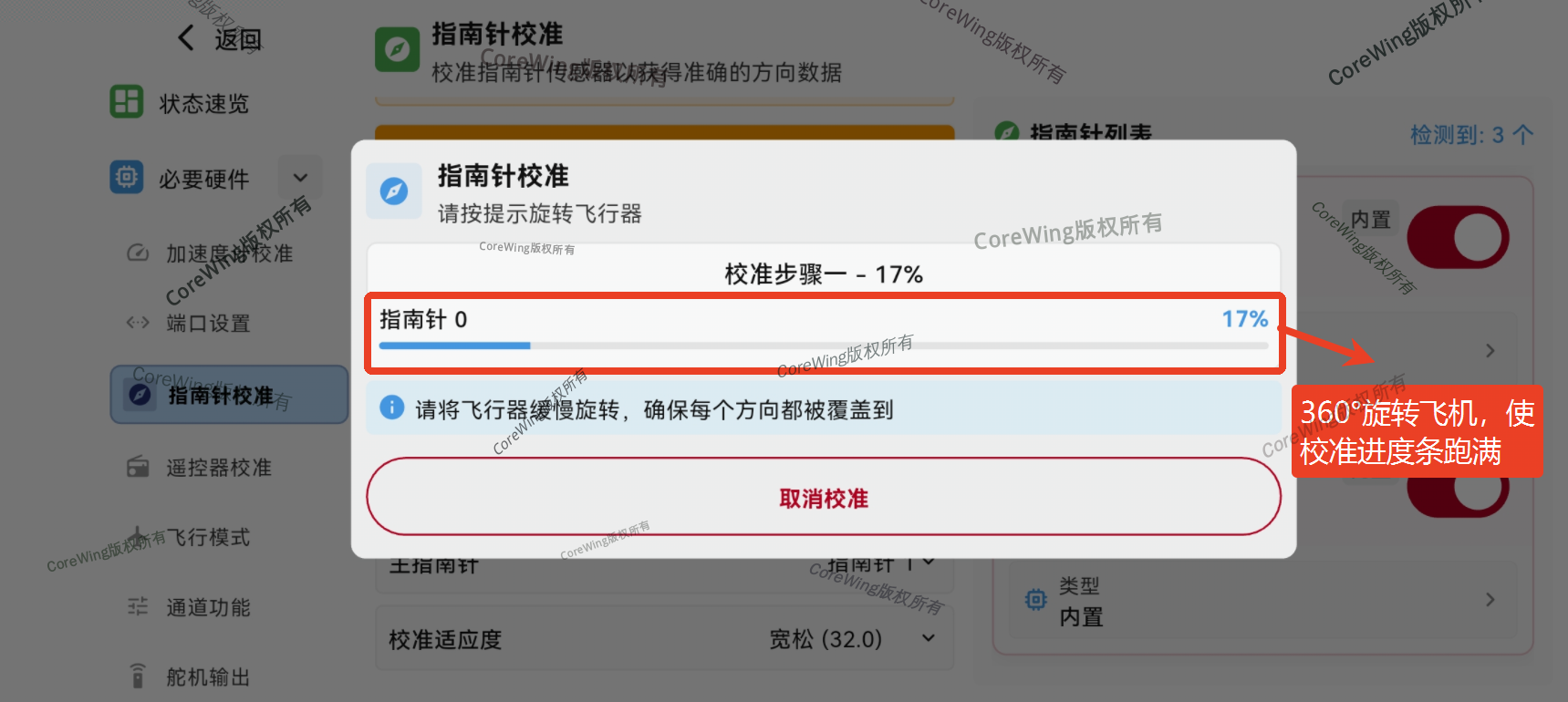
- 360°旋转飞机,使校准进度条跑满
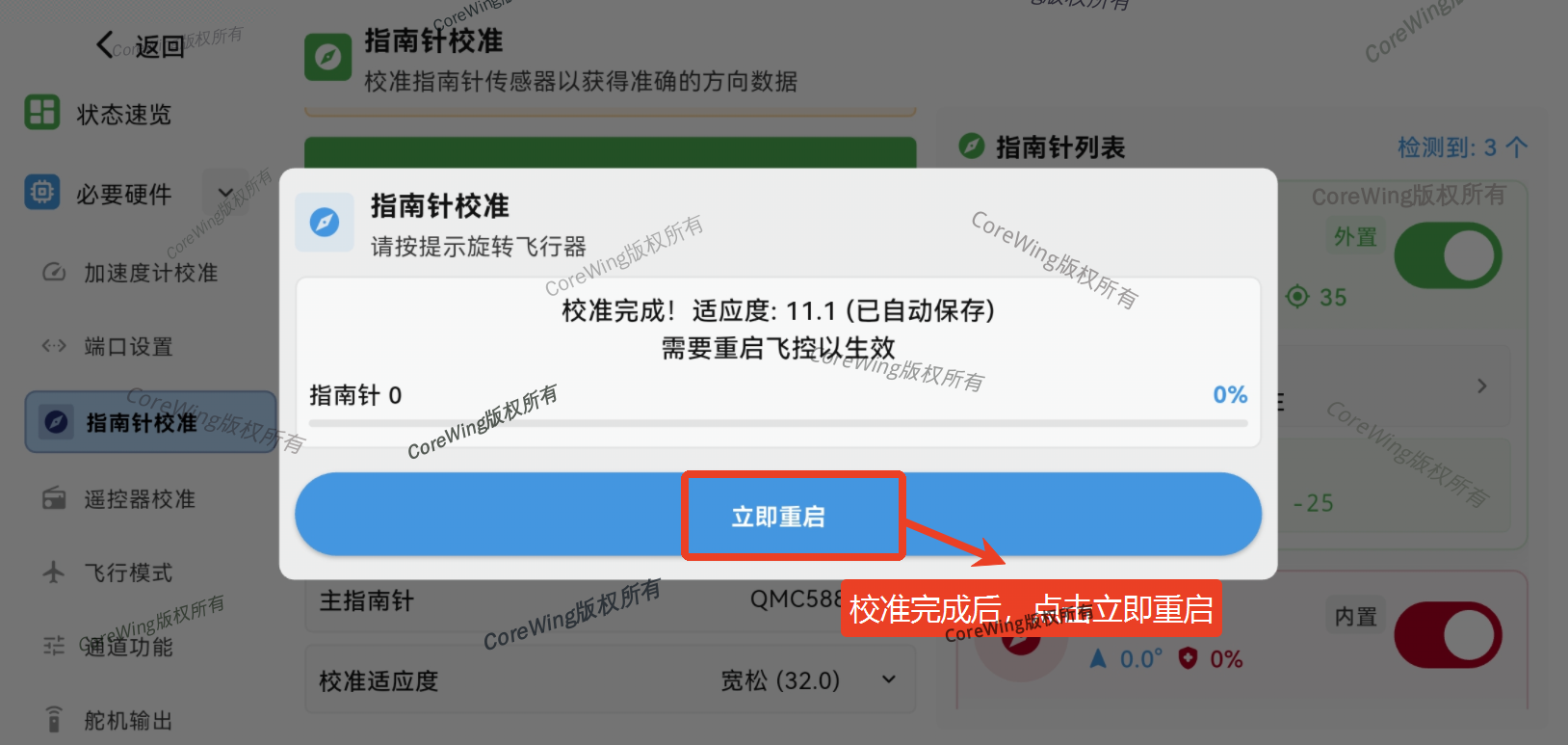
- 校准完成之后点击 立即重启。
重要
罗盘校准需要校准准确,否则会导致地面站报错:EK3 active/DCM active
5.4 水平校准
重要
在飞控安装完成后需要进行一次水平姿态校准,对陀螺仪的安装倾角进行补偿,以确定正确的平飞姿态!
- 将飞机平放在平整地面,进行 水平校准。

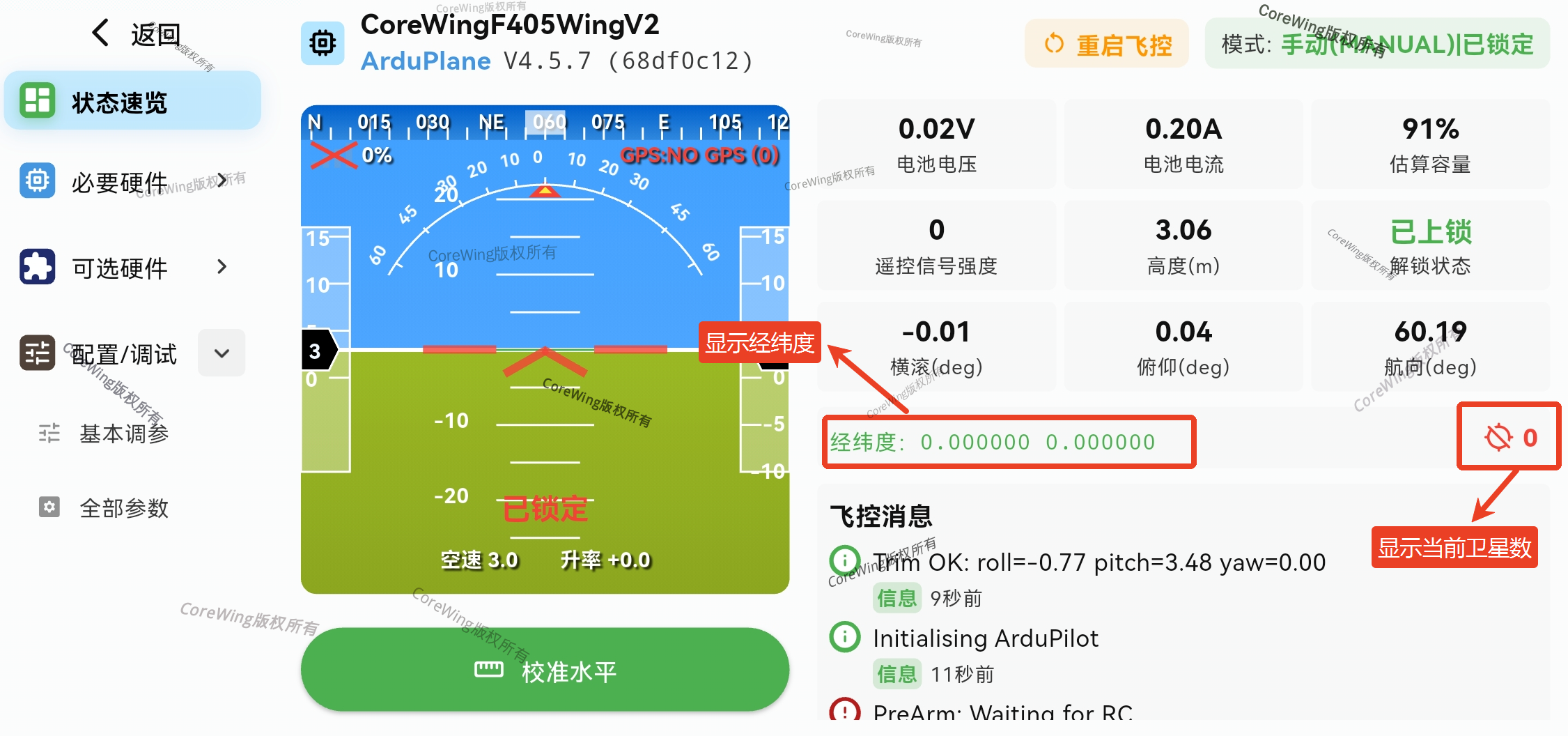
- 进入 状态速览页面,点击 校准水平

- 校准完成后,姿态线为水平

5.5 失控保护参数设置
重要
如何设置失控保护参数详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/fc/failsafe.html
六、飞行测试
6.1 自检参数设置
进入 解锁前检查项
点击即可 禁用或启用 该解锁自检项
重要
需要将地形跟随功能关闭,否则会影响遥控器解锁

重要
如何设置解锁自检参数详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/fc/prearm-check-setup.html
6.2 起飞前检查
6.2.1 重心检查
1.参考机身标识:
- 固定翼机身上会标注推荐重心位置,通常在机翼前缘后 25-30% 处。

2.手指支撑法:
将飞机用 两根手指 放在主翼下方的推荐重心点上,轻轻平衡机身。
如果 机头过重 或 机尾过重,需要调整电池或配重。
机头偏重(重心过前):
飞机在飞行时不易拉升,可能导致起飞失败炸机。
可尝试 将电池后移 或 减少机头配重。
机尾偏重(重心过后):
飞机容易 抬头失速。
解决方法: 将电池前移 或 增加机头配重。
6.2.2 起飞前舵面检查
- 遥控器与飞控建立连接后,进入状态速览页面,即可查看当前飞行模式

重要
飞行模式切换至 FBWA 模式
当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
当飞机抬头时,升降舵面朝下。
当飞机低头时,升降舵面朝上。
重要
飞行模式切换至 ACRO 模式
当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
当向上打升降杆时,反馈为升降舵面朝下。
当向下打升降杆时,反馈为升降舵面朝上。
当向左打方向杆时,反馈为方向舵面朝左。
当向右打方向杆时,反馈为方向舵面朝右。
6.2.3 卫星数检查
重要
在室外,检查卫星数是否大于 8 颗,大于 8 颗才可以起飞!
若卫星数一直小于 8 颗,请到空旷场地,若无改善请更换 GPS 模块。
- 进入状态速览页面即可查看卫星数量

6.2.4 风向确认
观察风向:
可观察 烟雾、风标、旗帜 等风向标志。
使用 轻质物体(如草叶)抛向空中,观察飘动方向。
确定逆风起飞方向:
逆风起飞可提供更大的升力,降低起飞速度要求。
顺风起飞可能导致失速或被风压住机头,容易导致炸机。
6.3 手抛起飞或滑行起飞须知
根据飞机实际装机情况,选择 手抛起飞 或 滑行起飞,确保起飞顺利。
6.3.1 手抛起飞
1.模式准备:
选择
ACRO 模式,确保飞机舵量充足。推油门至 60-80%,确保起飞推力足够。
2.起飞姿势:
手握机翼下方,对于飞翼建议手握机翼,防止打手。
向上 30° 角度抛出,确保升力足够。
3.抛出技巧:
力度适中,避免过猛或太轻(不足以爬升)。
顺势送出,而非向下砸出。
重要
注意事项:
避免低油门抛飞,确保起飞动力充足。手抛后立即接管横滚杆,避免飞机滚转失控。
6.3.2 滑行起飞
选择
ACRO 模式。推油门至 60%-70%,保持适中加速度。
保持方向稳定,避免飞机滑行过程中偏航失控。
飞机速度足够后,缓慢拉起俯仰,使其顺利离地。
重要
注意事项:
确保起飞场地足够,避免短距离内急速抬升导致失速。
逆风滑跑,提高升力,避免侧风影响。
观察飞行状态,防止过度拉升或急速倾斜。
6.4 空中测试
重要
案例演示
- 在飞行时,未确认飞机飞行姿态是否贴合飞机的飞行攻角,在自动飞行时有低头的情况。同时未进行自动调参,PID 不足,导致自动飞行时无法拉起足够的舵面产生足够的舵效。在切换模式至 RTL 时,飞机进入自动飞行后,直接加速俯冲至地面上导致炸机!
飞行第一视角:
飞行第三视角: 因此,进行完整的空中测试是非常有必要性的。1.OSD设置
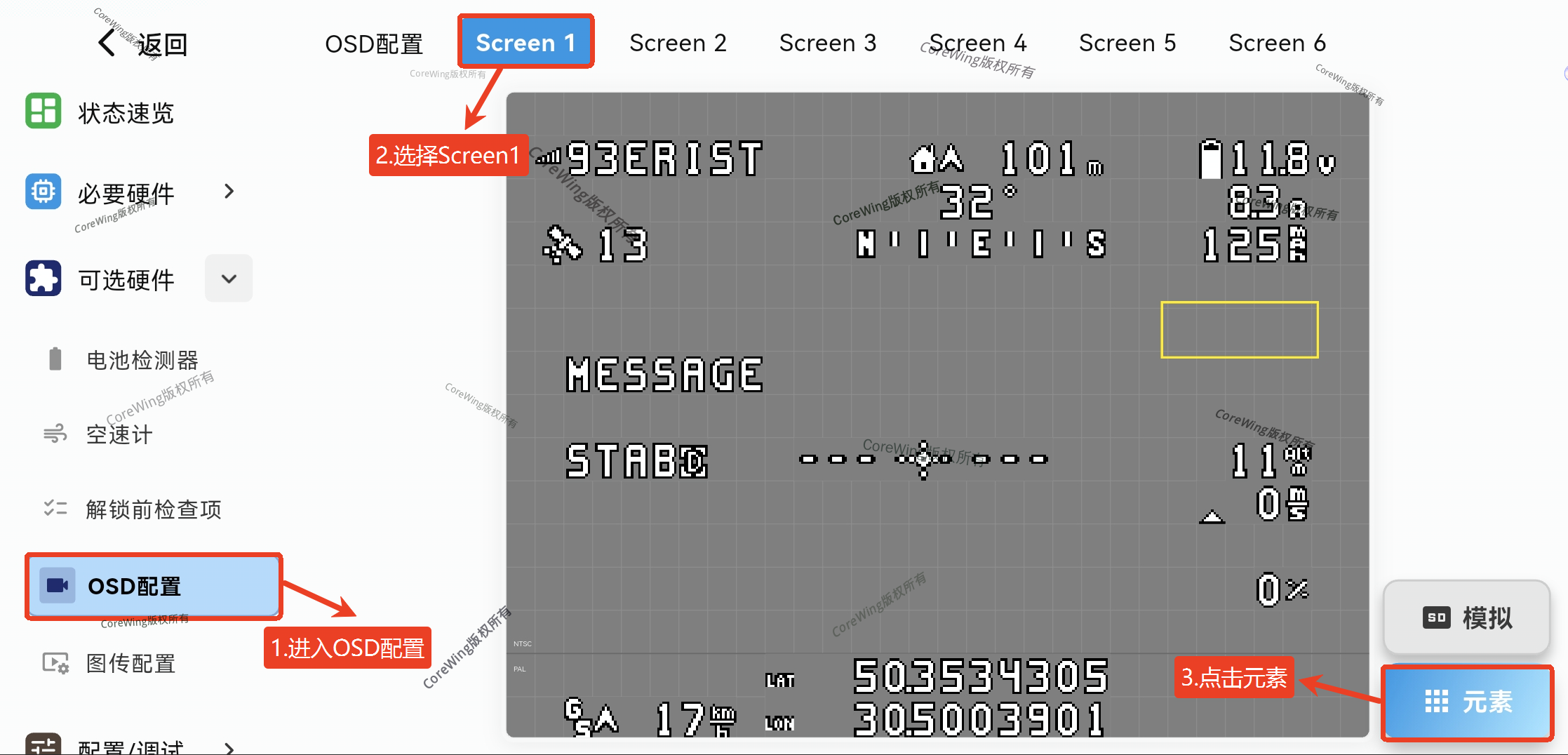
进入 OSD 配置,选择 screen1
点击元素
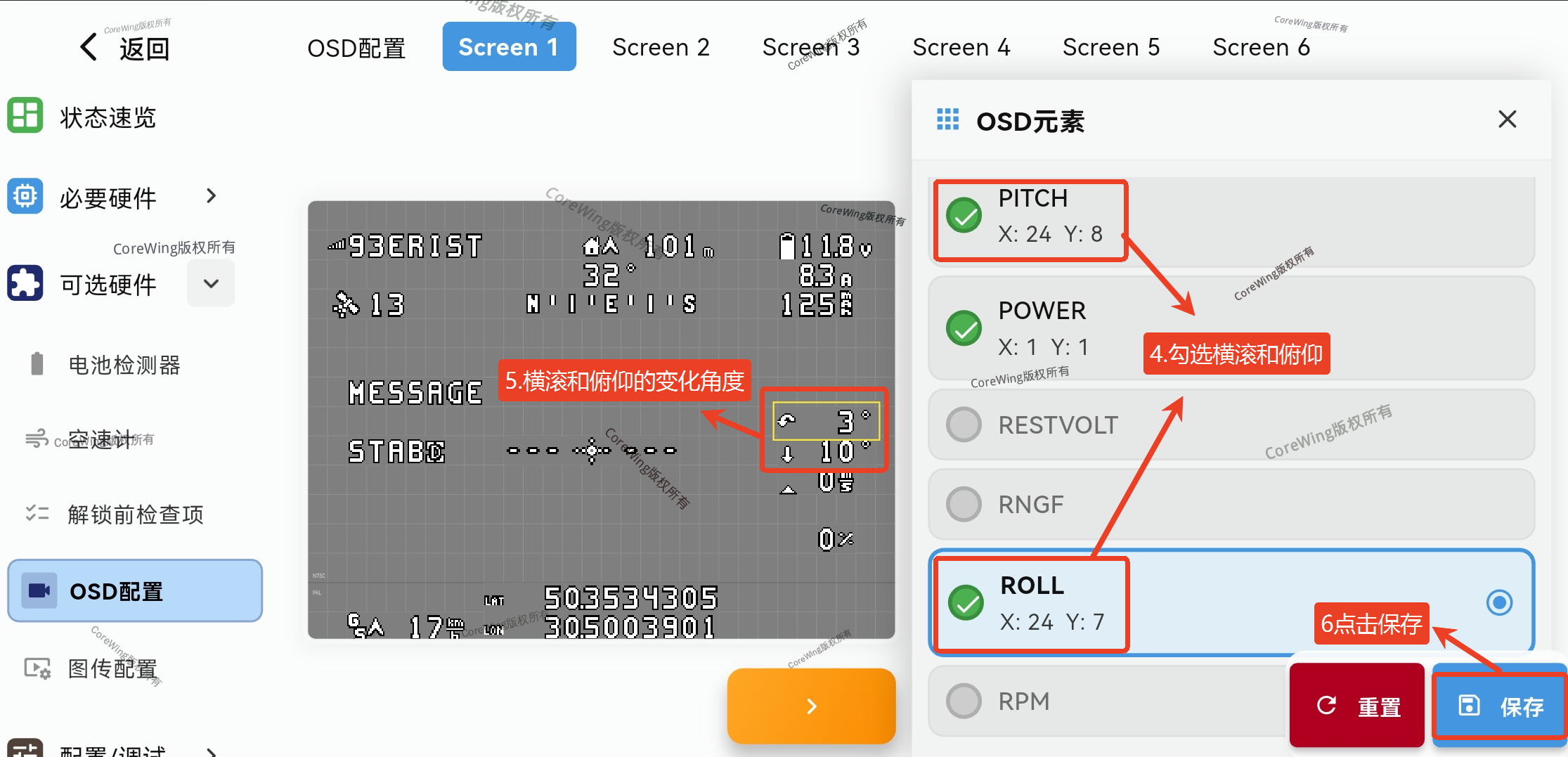
勾选横滚(ROLL)和俯仰(PITCH)
点击保存
2.舵面测试
- 起飞成功后,将 飞行模式 切换至
FBWA 模式,查看飞机是否自动修正姿态。
重要
若飞机姿态异常,切换至 ACRO 模式 降落,检查 FBWA 模式 下的 舵面。
3.平飞测试与调整
重要
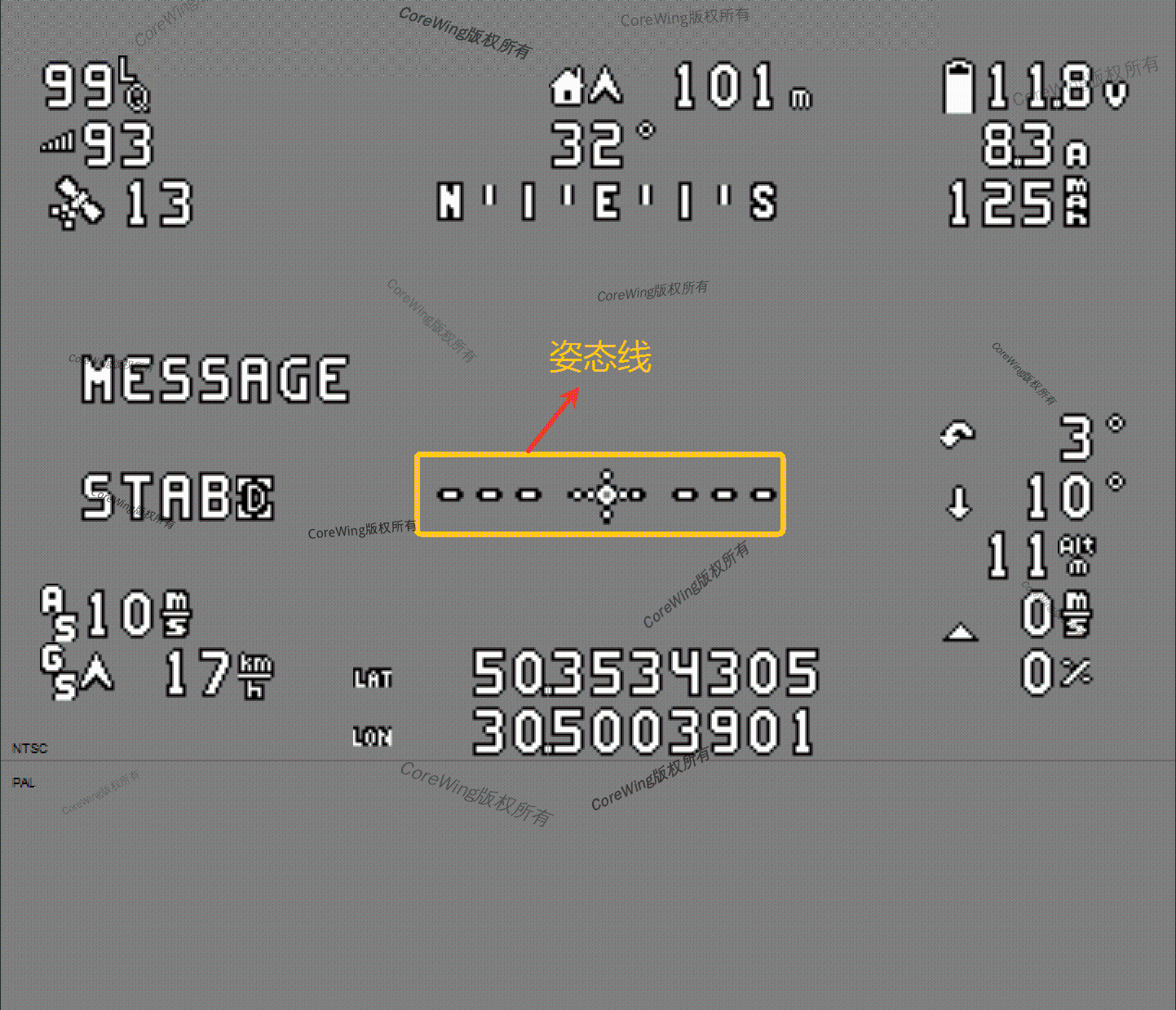
可通过查看 OSD 的飞行姿态线判断抬头或低头!
切换至
CRUISE 模式,顺风逆风各飞行一次,观察 OSD 的姿态线,关注俯仰变化角度和横滚变化角度。若横滚变化角度超过 3°-5°,则需要切换至
FBWA 模式及时降落,重新做 校准水平。

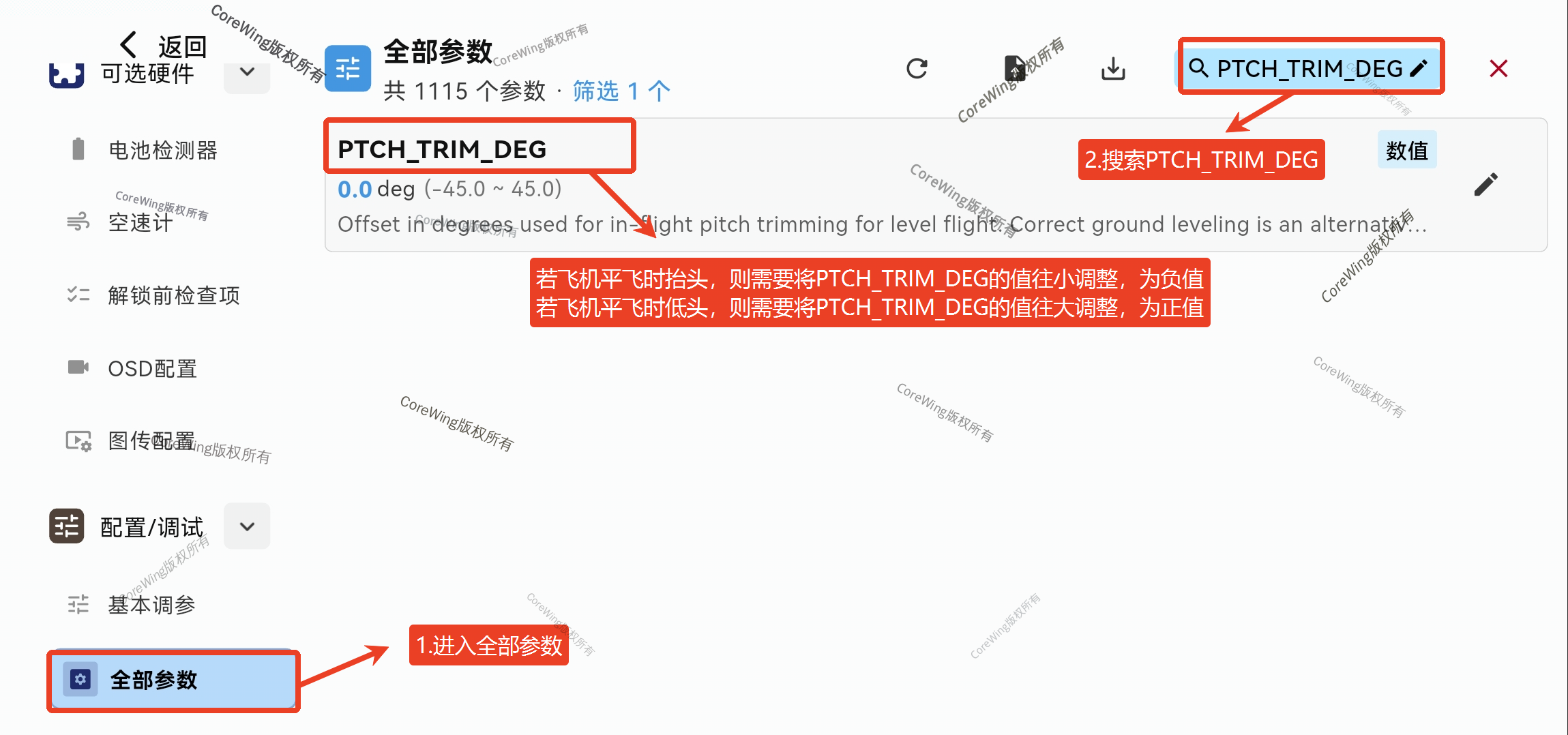
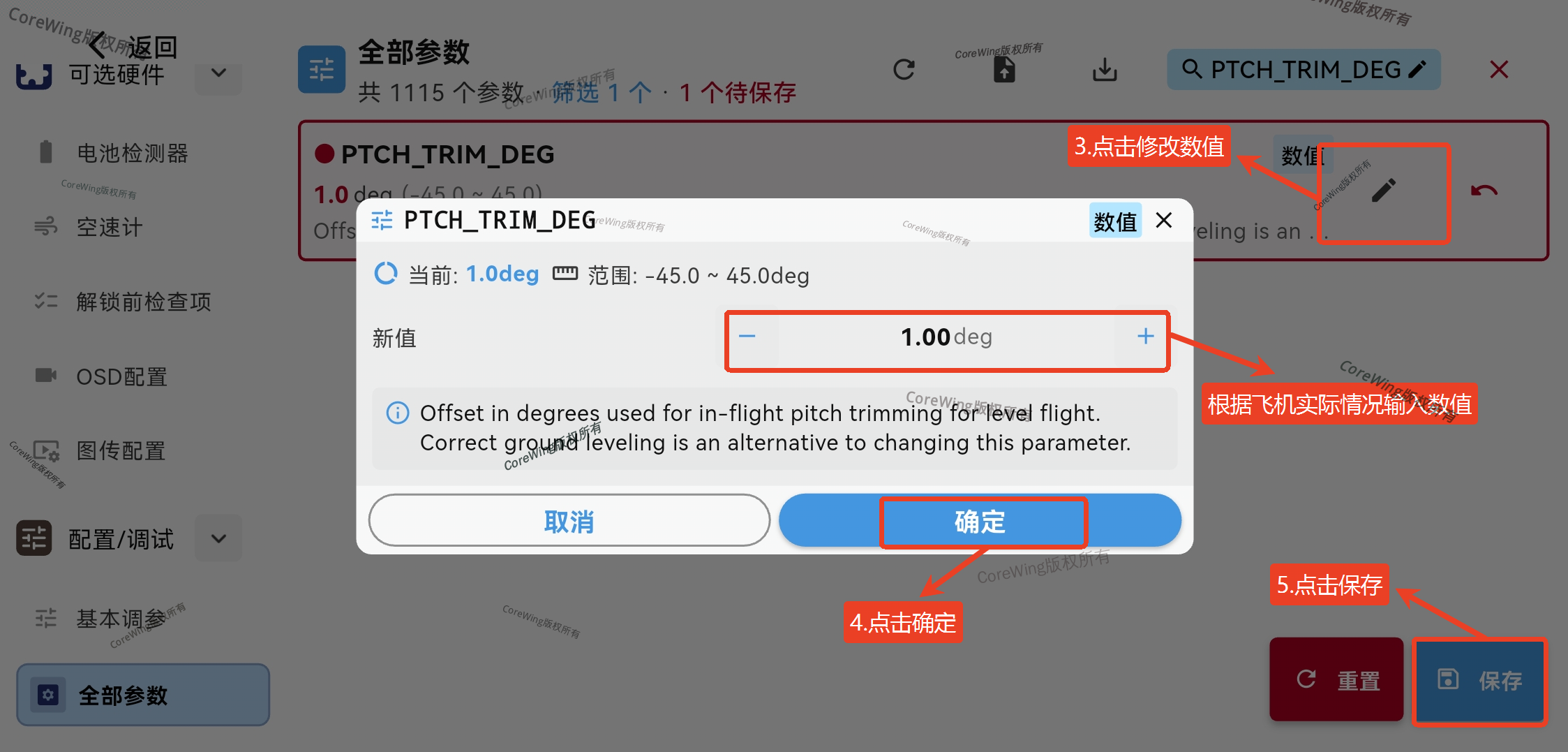
- 若俯仰变化角度超过 3°-5°,则需要切换至
FBWA 模式降落,调整PTCH_TRIM_DEG的值,以让飞机贴合 飞行攻角 进行平飞。
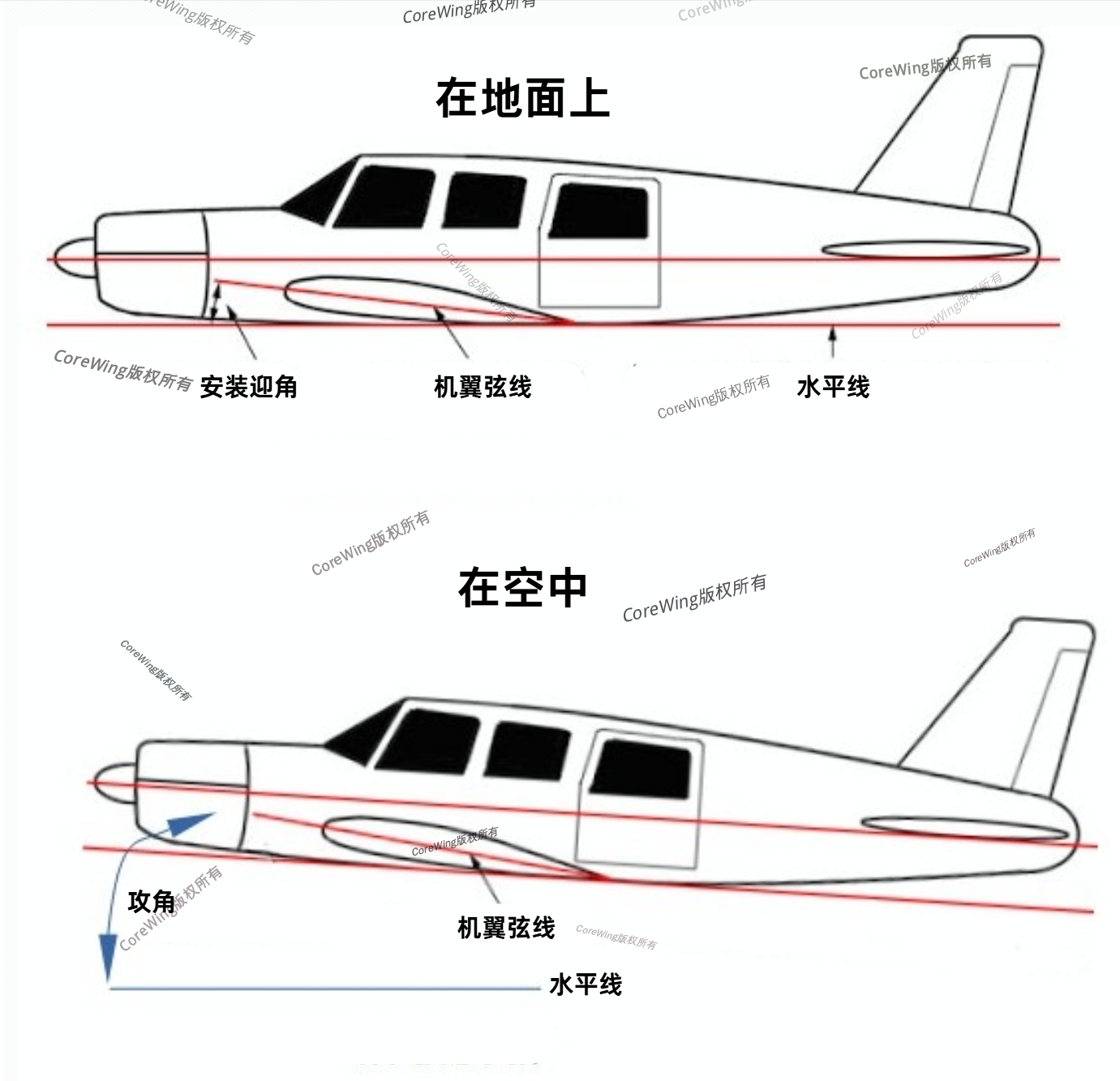
若飞机平飞时低头,则需要将
PTCH_TRIM_DEG的值往大调整,为 正 值。若飞机平飞时抬头,则需要将
PTCH_TRIM_DEG的值往小调整,为 负 值。
4.进行 SERVO_AUTO_TRIM(舵机自动配平)
- 起飞,进行
SERVO_AUTO_TRIM调参,调参完后降落。
重要
如何进行 SERVO_AUTO_TRIM(舵机自动配平) 可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/fc/servo-autotrim.html
5.自动调参
- 起飞,将 飞行模式 切换至
AUTOTUNE 模式,进行自动调参,调参完后降落。
重要
如何使用自动调参详细内容可参考该文章:https://docs.corewing.com/plane/ardupilot/settings/fc/autotune.html
6.油门调优
起飞,切换至
CRUISE 模式,逆风飞行,查看当前设置的巡航油门是否能让飞机保持平飞,若飞机有抬头或低头的现象,则需要调整 巡航油门,低头需要 增加 油门,抬头需要 减小 油门。
随后起飞,切换至
CRUISE 模式,逆风飞行,再次确认当前巡航油门是否合适,同时观察 OSD 显示的地速,记录下来为 [巡航速度]。切换到 FBWA 模式,将油门保持在 巡航油门,顺风飞行,观察 OSD 显示的地速,记录下来为 [顺风地速]。
保持在 FBWA 模式,将油门保持在 巡航油门,逆风飞行,观察 OSD 显示的地速,记录下来为 [逆风地速]。
[顺风地速] ÷ 3.6 =
[AIRSPEED_MAX],[逆风地速] ÷ 3.6 =[AIRSPEED_MIN],将得到的数值四舍五入填入AIRSPEED_MAX和AIRSPEED_MIN当中。

- 将 [巡航速度] ÷ 3.6 =
[AIRSPEED_CRUISE],需确认[AIRSPEED_CRUISE]要略大于[AIRSPEED_MIN],将得到的数值四舍五入填入AIRSPEED_CRUISE当中。

7.飞行数据检查
- 观察 Mission Planner 或
OSD数据,确认 GPS、航向、高度、地速、电压电流 等数据正常。
重要
若发现数据不正常,请及时降落,检查设备!
8.返航功能测试
- 将 飞行模式 切换至
RTL 模式,测试飞机是否返航至起飞解锁点附近盘旋。
重要
若在返航模式下飞行姿态异常,请及时切换至 ACRO 模式 或 FBWA 模式,检查返航参数设置!
9.着陆前检查:
确认电池余量,确保有足够电量完成着陆。
观察风向,选择逆风降落方向。
技术支持二维码
