刺客 T1(PNP)垂起快速上手教程-ArduPilot
刺客 T1 推荐参数
CoreWing F405 WING V2 参数:
HEEWING T1_Y3 垂起参数
CoreWing_F405_WING_V2.param
SpeedyBee F405 WING APP 参数:
HEEWING T1_Y3 垂起参数SpeedyBee_F405_WING_APP_MINI.param
SpeedyBee F405 WING MINI 参数:
HEEWING T1_Y3 垂起参数SpeedyBee_F405_WING_APP_MINI.param
Missionplanner 地面站介绍: 点击跳转链接
固件烧录教程(本文章使用 AP4.5.7 固件): 点击跳转链接
✳按照以下教程进行装机,以获得最佳的参数使用效果
一.垂直起降固定翼无人机基本原理
垂直起降固定翼无人机结合了多旋翼和固定翼技术,使用多旋翼进行垂直起降,通过转换机制切换到固定翼模式实现高效水平飞行。在水平飞行中,依靠机翼产生升力,并通过舵面调整方向和姿态。

二.装机前准备
1.PNP套件及电池推荐:

推荐使用格氏金砖 4S 2200mah 45C 电池,机舱盖不会突起,保证飞机整体气动性能。
2.电装设备:
刺客 T1 飞控参数是基于以下设备装机进行配置测试的,必要设备决定着推荐参数的实际使用效果。
A.必要设备:
飞控: CoreWing F405 WING V2 / CoreWing F405 WING MINI V2
罗盘: 北征 BZ-251GPS M10 罗盘 5883
接收机: SpeedyBee Nano 2.4G ELRS 接收机
空速计: 数字空速计

B.选装设备:
模拟图传:
图传模块: SpeedyBee TX ULTRA 1.6W
摄像头: RunCam Phoenix 2 Nano

高清图传:DJI O4 AIR UNIT

2.1 加速度计校准
重要
注意:进行加速度计校准时务必将飞控从机舱内取出,到平整桌面进行校准,以提高校准准确性,保证飞行稳定!
- 使用 USB 数据线将飞控连接至地面站。
- 点击初始设置。
- 点击加速度计校准。
- 点击校准加速度计。
重要
操作完毕后断开地面站连接和飞控所有供电,重新连接地面站。

重要
在使用过程中温度和气候变化比较大、陀螺仪在遭受了严重的撞击、更换了传感器等,需要对加速度计进行重新校准!
重要
加速度计校准详细操作流程可参考: https://docs.corewing.com/plane/ardupilot/settings/fc/accel-calibration.html
2.2 导入参数
A.开启垂起参数
- 点击配置调试
- 点击全部参数表
- 搜索 Q_ENABLE
- 将 Q_ENABLE 的值设置为 1
- 点击写入参数(多点两次,会有弹窗提示 Saved)

重要
操作完毕后断开地面站连接和飞控所有供电,重新连接地面站。
B.导入参数
- 点击比较参数
- 选择参数文件
- 点击打开
- 点击 continue
- 有提示点击 OK 或 yes
- 点击写入参数,等待弹窗提示 Saved
- 执行多次直至 Param Compare 内无参数差异


重要
每操作完一次 后断开地面站连接和飞控所有供电,重新连接地面站,回到第一步重新操作,直到比较参数界面 无参数差异。
2.3 PNP 套件检查及木板安装位置
A. 检查套件是否有损坏,是否安装牢固。
B. 将舵机测试仪切换至中位档,查看翼面是否齐平,不齐平请调节拉杆,连接倾转舵机,切换到 Auto(自动)档或者手动调节旋钮,测试倾转舵机是否转动流畅。
重要
注意:使用舵机测试时,请勿将舵机转至最大角度,容易损坏舵机。
无舵机测试仪可使用 PWM 接收机代替。

C. 将线材进行分类贴标签,方便后续装机,如图所示:

三.设备装机
将 PNP 套件完成组装后再进行以下操作:

3.1 飞控接线
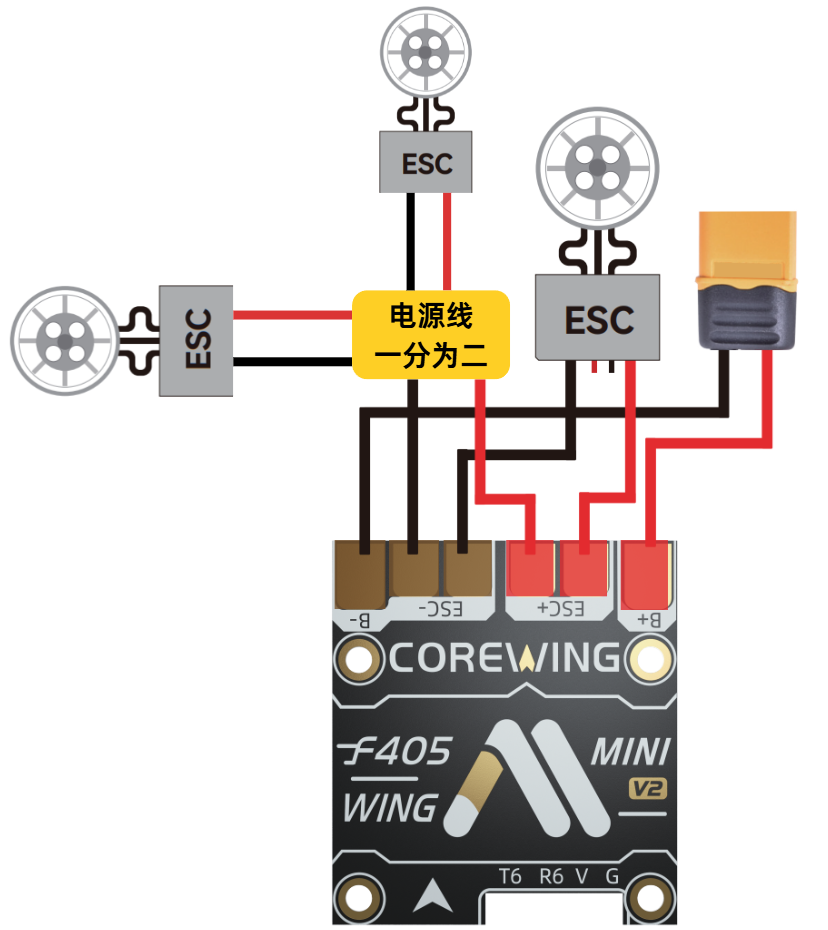
飞控电源接线如图所示:
Corewing F405 WING V2:

Corewing F405 WING MINI V2:
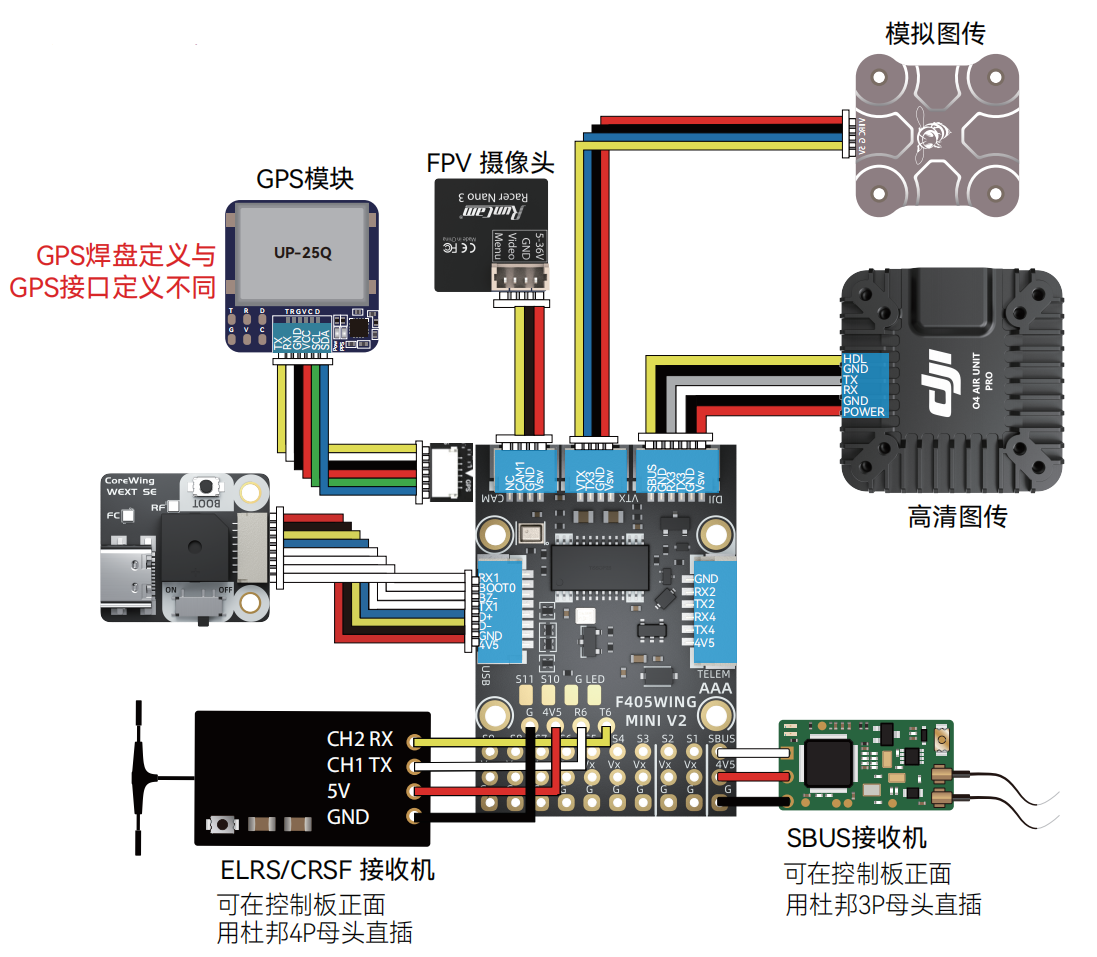
飞控与外设接线如图所示:
Corewing F405 WING V2:
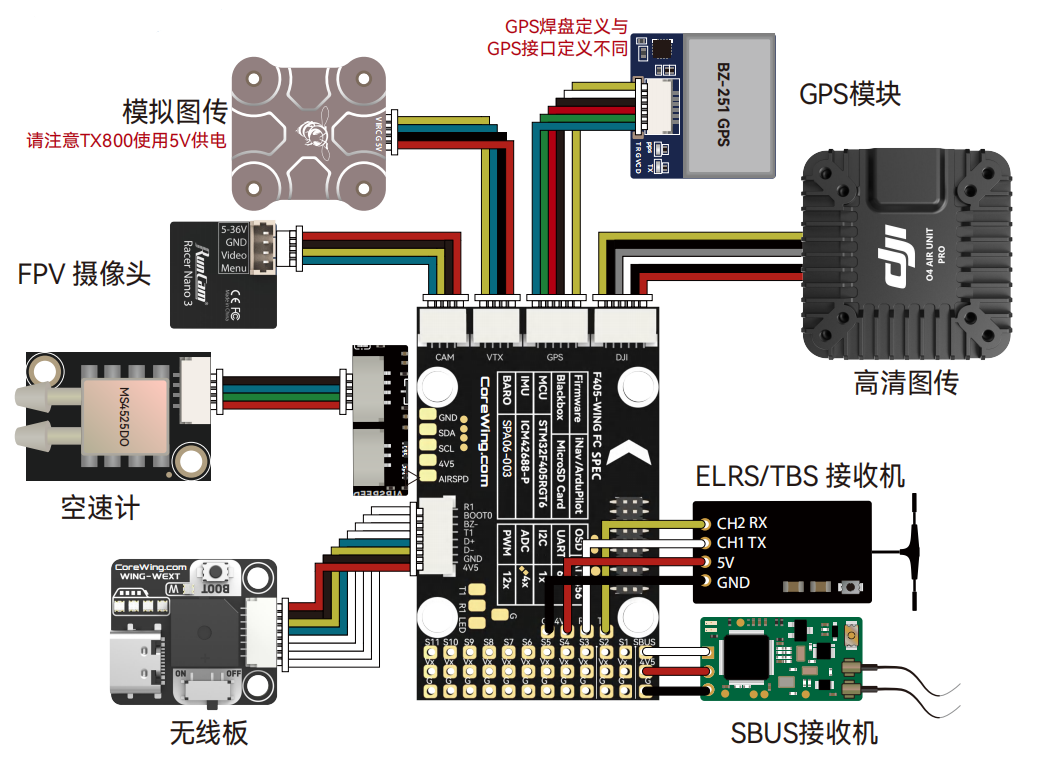
Corewing F405 WING MINI V2:
3.2 飞控安装
飞控应安装于飞机的重心位置以及三个电机的中心位置,按下图进行安装。

SERVO OUTPUT 在此参数设置如图所示:

飞控排针接线如图所示:
PNP 套装副翼使用 Y 线连接。


重要
图例仅作演示,在此步骤请勿装桨叶!
3.3 接收机安装
接收机装机位置如图所示,将天线沿出舱外,使用胶布固定天线:

3.4 GPS 模块安装
装机位置如图所示,模块底部使用 3M 胶固定,确保罗盘安装牢固,否则会很影响飞行效果:


重要
1.远离金属安装,例如:磁铁舱盖、金属拉杆等,否则会干扰罗盘。
2.远离接收机、舵机线、电机等设备安装,否则会干扰罗盘。
3.注意确认安装是否牢固。
4.不同模块的详细安装操作请参考其说明书。
3.5 图传及摄像头安装
图传和摄像头可在飞行测试无问题后再进行安装。
图传装机位置,使用 3M 胶固定,如图所示:


3.6 空速管安装
可参考以下空速管装机位置进行安装,底部使用 3M 胶固定,再用黑色胶布(减少紫外线射入影响空速计精确度)进行固定,最好将空速计放置至机舱内,使用效果更好:


3.7 遥控器校准及通道混控配置
四.飞行模式介绍
以下内容将会使用 ACRO、Manual、STABILIZE、FBWA、QSTABILIZE、QLOITER、QHOVER 七种飞行模式。
五.飞机调试
将电装设备安装好后再进行飞机调试:

5.1 垂起模式检查
将三段飞行模式设置为QSTABILIZE,STABILIZE,Manual

5.1.1 倾转舵机检查
重要
测试时请勿装桨叶!
将飞行模式切换至 QSTABILIZE,接上电池供电;
倾转舵机在垂起状态下是 90 度垂直,如图所示:

若不是,请调整 3 通道的 min 值和 4 通道的 max 值,如图所示:

将飞行模式切换至Manual ;
倾转舵机在固定翼状态下是 180 度水平,如下图所示:

若不是,请调整 3 通道的max值和 4 通道的min值,如图所示:

5.1.2 电调校准
重要
确保电池已断开,接收机已对频,桨叶已卸除!将飞行模式切换到 QACRO 模式
①点击飞行数据→点击动作→点击解锁/锁定→点击 Force Arm。

②马上将油门推至最高。
③给飞控使用电池供电。
④电调响起提示音→马上将油门推至最低→电调提示音结束。
BLHeli32/BLHeli_S 电调校准声:
接上电池等待 2 秒→“播放一首音乐”为油门最高点确认音→等待音乐播放完毕→将油门推到最低等待 1 秒→“播放另一首音乐,嘚-嘚-”为油门最低点确认音→校准完毕
PWM 电调校准声:
接上电池等待 2 秒→“哔-哔-”油门最高点确认音→将油门推到最低等待 1 秒,N 声短鸣声表示锂电池节数→“哔-”油门最低点确认音→校准完毕。
⑤轻推油门,电机立马转动,将油门从 0%推至 20%,查看油门是否线性。
⑥若和上述效果有差异,断开电池,返回第②点重新进行校准。
重要
电调校准及 Dshot 协议开启详细内容可参考该文章: https://docs.corewing.com/plane/ardupilot/settings/esc/esc-dshot.html
5.1.3 电机转向检查
重要
注意测试时请勿装桨!
强制解锁飞机,检查各个电机转向。
轻推油门,电机正确转向为左电机顺时针,右电机逆时针,尾电机逆时针 (PNP 默认出厂配置是这个转向) ,如下图所示,可轻抚电机感受转向:

5.1.4 遥控器输出检查
强制解锁→轻推油门至电机刚好转动→电机均转动→ 轻微打杆 给予飞控指令。
重要
电机转速快慢可通过贴胶带或美纹纸感受转速。
- 推俯仰杆,尾电机转速增加;
- 拉俯仰杆,左前右前电机转速增加;
- 打左横滚,右前电机转速增加;
- 打右横滚,左前电机转速增加;
若反馈不一致,请检查 SERVO OUTPUT 和排针接线。
5.1.5 电机自稳反馈检查
强制解锁→轻推油门至电机刚好转动→电机均转动→给予飞机一定 姿态变化。
重要
电机转速快慢可通过贴胶带或美纹纸感受转速。
- 当飞机抬头时,尾电机转速增加;

- 当飞机低头时,左前右前电机转速增加;

- 当飞机左滚时,左前电机转速增加;

- 当飞机右滚时,右前电机转速增加;

若电机反馈与上述不一致,请 SERVO OUTPUT 和排针接线。
5.1.6 桨叶安装
- 根据电机转向选择正桨或是反桨。
- 桨叶安装时注意有字的一面朝上。
(PNP 默认出厂配置是这个转向)

5.2 固定翼检查
重要
检查 STABILIZE模式下,给予飞机姿态变化舵面反馈是否正确,若不正确请检查 SERVO OUTPUT。
检查Manual模式下,遥控打杆舵面反馈是否正确,若不正确请检查 遥控器校准。
5.3 罗盘校准
- 进入初始设置。
- 点击指南针。
- 查看是否有显示模块相关信息,若无请检查连接线材和模块。
- 勾选 Use Compass 1。
- 点击 Start,开始校准罗盘。
- 摇晃飞机使进度条跑满。
- 弹窗后点击 OK。
- 点击 Reboot,飞控自动重启。
重要
校准时远离金属物体,如汽车、电动车、高压电塔;
在室外 GPS 信号良好(至少 8 颗星)时校准;
校准时尽量使用无线调参,避免 USB 线干扰;
如更换 GPS/罗盘模块,或调整飞控安装位置,必须重新校准。


5.4 水平校准
重要
在 飞控安装完成后需要进行一次水平姿态校准,对陀螺仪的安装倾角进行补偿, 以确定正确的平飞姿态!
- 将飞机平放在平整地面,进行水平校准。


5.5 空速管校准
六.外场测试
6.1 自检参数设置
- 飞机在室外搜到星,且飞控自检通过后,将会显示“EKF3 ACTIVE”。
- 请确保消息报告显示“EKF3 ACTIVE”后,才可以起飞,如仅有”DCM ACTIVE”,请勿起飞!(可通过 OSD 查看,也可通过 MP 地面站中信息栏查看)


6.2 起飞前检查
6.2.1 重心检查
1.参考机身标识:
- 许多飞翼或固定翼机身上会标注推荐重心位置,通常在主翼前缘后 25-30% 处。

2.手指支撑法:
- 将飞机用 两根手指 放在主翼下方的推荐重心点上,轻轻平衡机身。
- 如果 机头过重 或 机尾过重,需要调整电池或配重。
机头偏重(重心过前):
- 飞机在飞行时不易拉升,可能导致起飞失败炸机。
- 可尝试 将电池后移 或 减少机头配重。
机尾偏重(重心过后):
- 飞机容易 抬头失速。
- 解决方法: 将电池前移 或 增加机头配重。
6.2.3 卫星数检查
重要
在室外,检查卫星数是否大于 8 颗,大于 8 颗才可以起飞!
若卫星数一直小于 8 颗,请到空旷场地,若无改善请更换 GPS 模块。

6.2.4 风向确认
观察风向:
- 可观察 烟雾、风标、旗帜 等风向标志。
- 使用 轻质物体(如草叶)抛向空中,观察飘动方向。
确定逆风起飞方向:
- 逆风起飞可提供更大的升力,降低起飞速度要求。
- 顺风起飞可能导致失速或被风压住机头,容易导致炸机。
6.3 飞行测试
6.3.1 垂起飞行测试
- 将三段飞行模式设置为 QSTABILIZE,QHOVER,QLOITER

重要
注意:在垂起模式为多旋翼的操控方式,建议测试时目视飞行
测试流程:QSTABILIZE 模式起飞→测试操作反馈是否正确→切换至
QHOVER→油门中位进行悬停一到两分钟→油门自动学习→QHOVER降落→断电重启飞控→QSTABILIZE模式起飞→油门控制在中位可悬停→切换至QLOITER→测试定高定点悬停
→QLOITER模式降落 。- 以
QSTABILIZE模式 小油门 起飞,测试打杆反馈,若操作反馈不正确,请返回 3.7 遥控器校准及通道混控配置和 5.1.2 电调及电机检查 重新检查; - 若在
QSTABILIZE模式下飞行稳定,将飞行模式切换至QHOVER,控制油门摇杆在 50%,飞机定高定点悬停; - 在
QHOVER模式下飞控会进行油门自动学习,以QHOVER模式降落,断开所有供电重启飞控。更换电池后再次起飞,切换回QSTABILIZE模式,控制油门在 50%,也可实现悬停效果; - 切换至
QLOITER,控制油门在50%,测试定高定点悬停效果,飞机开始悬停后,位置和高度变化幅度应在 1 米的半径圈内或者更小。
- 以
6.3.2 固定翼飞行测试
将三段飞行模式设置为 ACRO,STABILIZE,AUTOTUNE

重要
注意:在固定翼模式为固定翼的操控方式,建议 FPV 视角飞行
测试流程:ACRO 模式起飞→切换至 STABILIZE 测试飞机是否能够相对稳定飞行→切换至 AUTOTUNE →自动调参完毕→切换至 STABILIZE →感受飞机手感→降落上锁→断电重启飞控。
- 以
ACRO模式起飞,飞控会自动抗风,防止飞机因风侧翻,且保证飞机有足够的舵量。 - 随后切换至
STABILIZE模式,不操作遥控,查看飞机是否能够平飞一段时间,若无问题,切换至AUTOTUNE进行自动调参。 - 若在
STABILIZE模式下飞机姿态大幅度变化,请进行倾转舵机检查、舵面检查(STABILIZE模式)、水平校准检查。 - 自动调参完毕后,切换回
STABILIZE模式,感受飞行手感,随后降落。重要
:::
6.3.3 过渡飞行测试
将三段飞行模式设置为 QSTABILIZE,QLOITER,FBWA

重要
注意:
1.请确认垂起与固定翼的单独测试已无问题;
2.进行固定翼切换前,请在垂起模式将飞机飞至 20 米以上的高度,再进行过渡切换,飞行时 注意切换操作方式, 切换过程中 注意油门需要保持在中位。
测试流程:QSTABILIZE/QLOITER 模式垂直起飞→飞机到达高度→切换至
FBWA→飞机切换为固定翼模式(感受切换后的飞行)→切换至 QSTABILIZE/QLOITER 模式→飞机切换为垂起模式(感受切换后的飞行)→降落。- 以
QLOITER起飞,飞行至足够高度后,切换至FBWA,此时倾转舵机倾转直至电机完全水平,飞机完成从垂起模式切换至固定翼模式,开始向前飞行,注意控制高度,感受切换后的飞行是否顺畅有无异常。 - 已安装空速计:倾转舵机将倾转至一定角度等待空速到达,随后电机完全水平,切换至固定翼模式。
- 无安装空速计:倾转舵机将在 2-3s 内切换至水平状态,飞机切换至固定翼模式后会进行小幅度的俯冲,以增加空速,提升机翼的升力,防止飞机失速。
- 将飞行模式由
FBWA切换回QLOITER,此时倾转电机快速从水平状态切换至垂直状态,切换过程中飞机可能会有小段滑行,切换回垂起模式后,感受切换后的飞行是否顺畅有无异常,随后降落。
- 以
重要
若在转换至固定翼的过程中,飞机姿态出现大幅度变化,请切换回 QSTABILIZE 模式,倾转舵机将快速变为垂直状态,立刻降落。根据上述测试内容进行倾转舵机检查、舵面检查( STABILIZE 模式)、水平校准检查。
技术支持二维码
