数传如何使用 Mavlink 进行遥测-以微空数传为例
一、数传使用 Mavlink 进行遥测的工作原理
数传使用 MAVLink 协议,通过无线通信在飞行器与地面站之间高效传输遥测数据和控制指令,实现实时监控与双向控制。
二、设备准备
1.飞控: CoreWing F405 WING V2 / SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI;
2.数传:微空科技 LR900 数传-天空端和地面端或微空科技 LR24 数传-天空端和地面端
3.数传线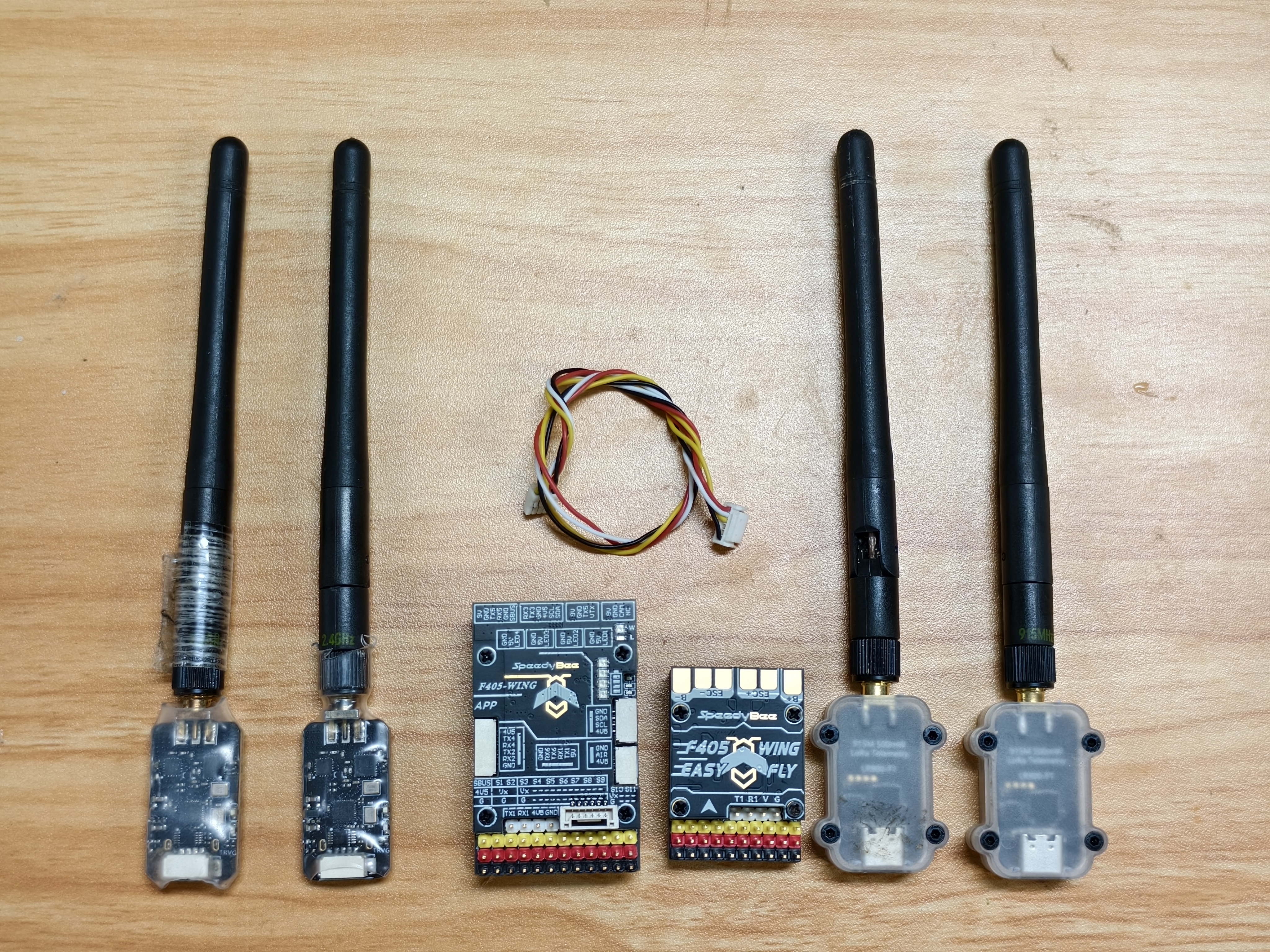
三、数传地面站的参数设置
1、微空助手下载链接和使用教程: https://micoair.cn/docs/wei-kong-zhu-shou-xia-zai-he-shi-yong-shuo-ming
2、将天空端/地面端使用 USB 数据线连接至电脑,打开微空助手, 将天空端/地面端的串口波特率和 USB 波特率均设置为 57600
设置完毕后,再次点击读取设置进行确认,保证波特率均已修改
四、不同地面站的连接设置
1、MissionPlanner 连接教程及问题排查
1)查询飞控可使用作为数传通信的串口
SpeedyBee F405 WING APP/SpeedyBee F405 WING MINI:
2)使用 USB 数据线连接至飞控,打开 MissionPlanner,进入全部参数表,将 SerialX_BAUD 设置为 57600,将 SerialX_Protocol 设置为 Mavlink2,,设置完毕后将飞控断电进行重启;

※以上所修改的串口(SERIAL1)仅做演示,请在设置前确认好数传所使用的飞控串口!
3)将天空端连接至地面站,数传接线可参考: https://docs.corewing.com/plane/ardupilot/settings/tele/telemetry-setup.html
4)使用 USB 数据线将地面端连接至电脑,打开 MissionPlanner,选择对应的 COM 端口进行连接,连接波特率选择 57600,点击连接;
5)地面站获取参数完毕,连接成功。
| 使用不同设备进行 Mavlink 通信效果对比表 | ||||
|---|---|---|---|---|
| 500 米处链接质量(%) | 500 米处包速率(个/s) | 1000 米处链接质量(%) | 1000 米处包速率(个/s) | |
| 数传 | 95~100% | 56~58 | 95~100% | 56~58 |
| MLRS 2.4G高频头-BLE | 90~100% | 55~60 | 90~100% | 55~60 |
| ELRS 2.4G高频头-USB | 90~100% | 25~35 | 90~100% | 25~35 |
| ELRS 2.4G高频头-WiFi | 90~100% | 25~35 | 90~100% | 25~35 |
Q&A
Q:若出现数传无法连接上地面站
A:使用 MissionPlanner 地面站进行检查:
检查数传和飞控之间的连接线材是否有损坏→检查数传地面站的 USB 波特率设置和串口波特率设置→确认数传之间已建立通信→进入 MissionPlanner 地面站检查连接波特率设置是否正确。
Q:若出现飞控数传后,导致舵面抖动。
A:数传干扰接收机,导致接收机输入到飞控后,输入有小幅度波动。
技术支持二维码
