INAV T 尾布局固定翼调参指南
重要
本教程基于 INAV 7.0.0 固件进行编写,不同版本固件操作可能会有所不同!
部分内容引用自 SpeedyBee APP 的页面,与 INAV 地面站设置一致。
调参时可使用 SpeedyBee APP 进行设置,也可使用 INAV 地面站进行设置。
一、飞行原理介绍
倒 T 型尾翼(Conventional Tail)是固定翼飞行器最常见的尾翼布局之一,由 水平尾翼(Horizontal Stabilizer)和垂直尾翼(Vertical Stabilizer)组成。其特点是水平尾翼安装在机身后部,低于主翼,而垂直尾翼则位于机身中央,形成类似倒置的 "T" 形结构。
倒 T 型尾翼的布局设计,使得 水平尾翼位于机身下方,相比 T 型尾翼,它具有更直接的气流影响,从而带来以下特点:
更低的迎角依赖性:气流能够更稳定地作用于尾翼,减少大迎角飞行时的失速风险。
更直接的俯仰操控:水平尾翼更接近主翼气流,升降舵响应更直接,控制更线性。
抗风性更强:相比于高位的 T 尾布局,低位尾翼受侧风干扰更小,着陆时更加稳定。

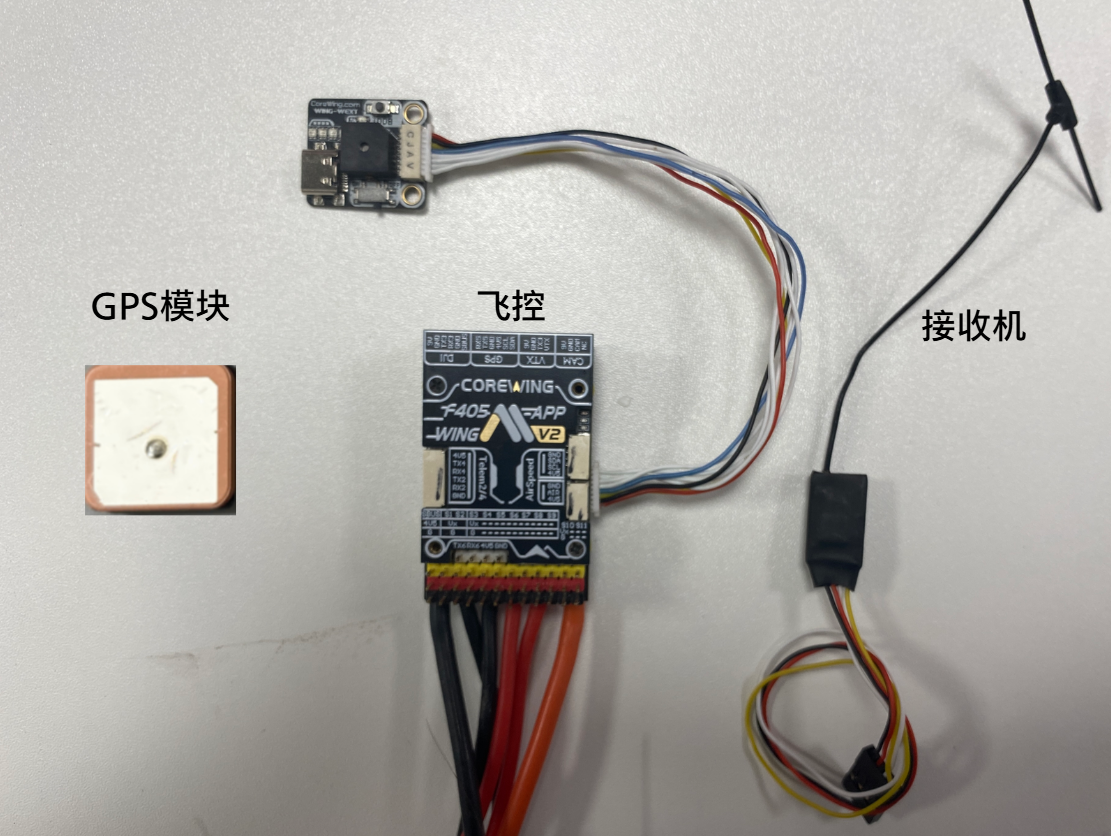
二、设备准备
必要设备:
1)飞控: CoreWing F405 WING V2/ SpeedyBee F405 WING APP/ SpeedyBee F405 WING MINI 任意一款飞控均适用该教程。
2)遥控器: 以 RadioMaster Boxer /RadioMaster TX16S 遥控器为例子。
3)接收机: 以 SpeedyBee ELRS Nano 2.4G RX 接收机为例子。
4)GPS 模块: 以 北征 BZ-251GPS 模块 为例 。
5)电机: 中航电原厂 2212 KV980 电机, 适用肥翁,仅供参考。
6)电调: 35 -45A 电调, 适用肥翁,仅供参考。
7)舵机: 12g 金属舵机, 适用肥翁,仅供参考。
8)电池: 6S1P 10000mah 电池, 适用肥翁,仅供参考。
9)桨叶: 8 寸两叶桨, 适用肥翁,仅供参考。
选装设备:
1)模拟图传: 以 SpeedyBee TX 1600 图传和 RunCam Phoenix2 SE V2 摄像头 为例子。
2)高清图传: 以 DJI O4 AIR UNIT 图传 为例子。
3)空速计: 建议使用数字空速计。

重要
地面站安装可参考该文章: https://docs.corewing.com/plane/software/insoftware/inav-version-install.html
如何更新飞控的固件-使用 INAV 地面站: https://docs.corewing.com/plane/beforetuning/inav-fw-update.html
三、初始设置
3.1 模型配置
使用 USB 数据线将飞控连接至地面站。
打开 INAV 地面站,点击 Connect。
重要
若有弹窗提示,选择 Airplane with a Tail。

重要
进入 Mixer,选择 Airplane,选择 Airplane,点击 Load and apply。

3.2 加速度计校准
重要
注意:进行加速度计校准时务必将飞控从机舱内取出,到平整桌面进行校准,以提高校准准确性,保证飞行稳定!
进入 Configuration 页面。
选择 Auto 可自动识别, 确认加速度计已识别。
重要
若显示红色则尝试重刷固件解决,若无法解决联系售后!

点击 Calibration。
点击 Calibrate Accelerometer。
按照图示进行校准。
重要
每校准一面,需要点击一次 Calibrate Accelerometer。

重要
下方图示与上方加速度计校准一一对应。

重要
校准完毕后点击 Save and Reboot。
重要
在使用过程中温度和气候变化比较大、陀螺仪在遭受了严重的撞击、更换了传感器等,需要对加速度计进行重新校准!
3.3 端口配置
进入 Ports 页面
参考表格进行配置
点击 Save and Reboot


3.4 GPS 配置
重要
开启 GPS 才可以在 Modes 页面查看到 NAV RTH(返航) 飞行模式的设置。
进入
GPS页面。开启 GPS for navigation and telemetry 选项。
点击 Save and Reboot。

3.5 遥控器设置及飞行模式设置
3.5.1 遥控器设置
重要
1.请将遥控器与接收机进行对频,再进行以下操作。
2.ELRS接收机如何与遥控器对频可参考该文章: https://docs.corewing.com/plane/ardupilot/settings/rc/elrs-bind.html
进入 Receiver 页面。
按照图示进行设置。
点击 Save and Reboot。

重要
EDGE TX 如何设置通道行程详细内容可参考该文章: https://docs.corewing.com/plane/inav/settings/rc/edgetx-endpoint-setup.html
- 导航至 MDL/MIXES 页面,检查遥控器 CH1-CH4 是否为以下设置,如不一致,请修改遥控器混控。

3.5.2 解锁通道设置
1.遥控器设置
选择一个 两段位开关
导航至 MDL/MIXES 页面,将其混控配置为
CH5

2.地面站设置
重要
注意解锁只能在非使用 GPS 的飞行模式下解锁,例如 ANGLE(自稳),在 NAV ALTHOLD 等需要 GPS 的模式下无法解锁!
进入 Modes。
将
ARM(解锁上锁)通道设置为CH5,值设置在 min:1700-max:2100。点击 Save。

3.5.3 返航通道设置
1.遥控器设置
选择一个 两段位开关。
导航至 MDL/MIXES 页面,将其混控配置为 CH6(可按实际情况进行设置,仅供参考)。

2.启用返航拨杆设置
重要
默认设置下,返航模式需要离出发地 5 米之外才可启动,5 米内 OSD 不会显示返航模式!
进入 Modes。
将
NAV RTH(返航)通道设置为CH6,值设置在 min:1700-max:2100。点击 Save。

3.5.4 飞行模式设置
1.遥控器设置
选择一个 三段位开关,设置三段飞行模式开关。
导航至 MDL/MIXES 页面,将其混控配置为
CH8。

2.地面站设置
进入 Modes。
将 ANGLE(角度模式) 通道设置为
CH8,按照下方图示进行设置,拓展值范围需要点击 Add range。将
AUTOTUNE和ANGLE叠加使用,按照下方图示进行设置。点击 Save。

重要
效果:第一段为 ACRO 模式,第二段为 ANGLE 模式,第三段为在 ANGLE 模式下进行自动调参。
重要
飞行模式介绍详细内容可参考该文章: https://docs.corewing.com/plane/inav/settings/fc/flight-modes.html
四、设备装机
4.1 飞控接线
- 电源接线
重要
注意:
1.电源正极必须接入指定焊盘。
2.ESC指电调。
3.焊接时注意不要虚焊。

4.2 飞控安装
飞控应安装于飞机的重心位置,可参考下图进行安装:

重要
若需要调整飞控的安装朝向,可参考该文章进行设置: https://docs.corewing.com/plane/inav/settings/fc/fc-orientation.html
4.3 外设安装与设置
- 外设接线

4.3.1 接收机安装
装机位置如图所示, 将天线沿出舱外,使用胶布固定天线:

4.3.2 Mixer 设置(舵机与电机设置)及舵面检查
开启舵机与电机输出:
重要
1.启用舵机与电机输出后,电机和舵机才可以运作。
2.固定翼模式下,需要开启低油门时禁止电机旋转, 防止解锁后电机转起来造成不必要的损伤。
3.多旋翼混控记得关闭低油门时停止电机以开启怠速。

输出接线:
重要
飞控自带 BEC,如电调也自带 BEC 需把中间电源线挑出来并做好绝缘,防止飞行途中晃动导致接触到导体,导致短路!!!

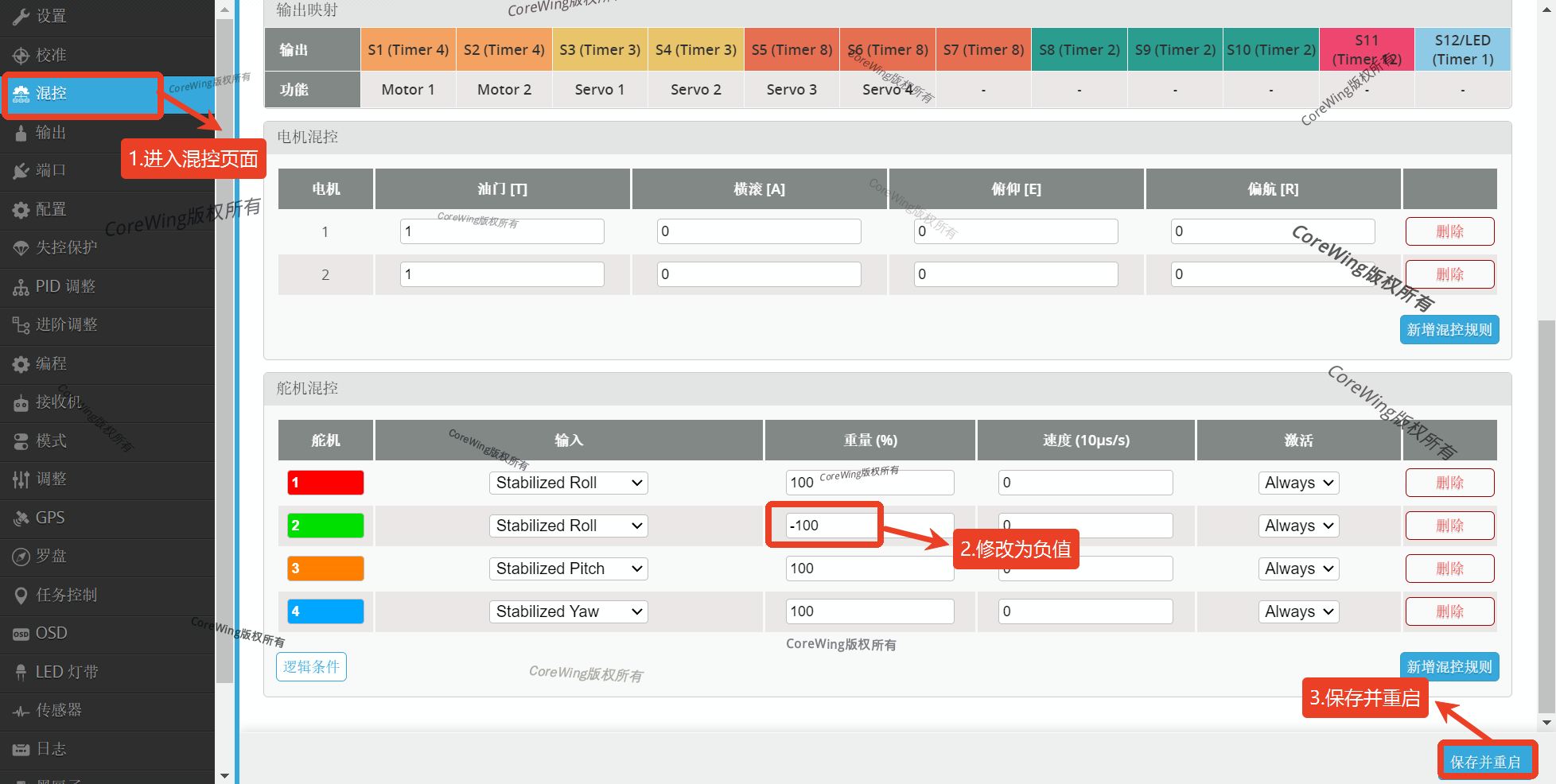
参数设置:
进入 Mixer 页面
按照图示进行设置
点击 Save and Reboot
| 通道 | 输出 | 说明 |
|---|---|---|
| S1 | Throttle | 油门 |
| S2 | Throttle | 油门 |
| S3 | Elevator | 升降舵 |
| S4 | Aileron | 左副翼 |
| S5 | Aileron | 右副翼 |
| S6 | Rudder | 方向舵 |

舵面检查:
a.自稳模式下,舵面反馈检查
重要
需要先点击校准罗盘,等待 30 秒之后,点击 Save and Reboot
重要
飞行模式切换至 ANGLE
当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
当飞机抬头时,升降舵面朝下。
当飞机低头时,升降舵面朝上。
b.手动模式下,舵面反馈检查
重要
飞行模式切换至 ACRO
当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
当向上打升降杆时,反馈为升降舵面朝下。
当向下打升降杆时,反馈为升降舵面朝上。
当向左打方向杆时,反馈为方向舵面朝左。
当向右打方向杆时,反馈为方向舵面朝右。
先检查自稳反馈是否正确,若自稳反馈不正确,将错误的舵面反馈所对应的舵机混控的 Weight 重量加个负号,即改为负值就可以实现舵面反向。
再检查手动反馈是否正确,若手动反馈不正确,需在遥控器设置反向。
以 EdgeTX 系统遥控器为例,导航至 MDL→INPUT 页面,将 Weight 的值设置为 -100,即可将手动反馈反向。


4.3.3 GPS 模块安装与设置
装机位置如图所示,模块底部使用 3M 胶固定, 确保模块安装牢固,否则会很影响飞行效果:
重要
安装时注意横平竖直安装,不要倾斜,否则无法正确设置安装角度。

重要
1.远离金属安装,例如:磁铁舱盖、金属拉杆等,否则会干扰罗盘。
2.远离接收机、舵机线、电机等设备安装,否则会干扰罗盘。
3.注意确认安装是否牢固。
4.不同模块的详细安装操作请参考其说明书。
重要
如何安装并设置罗盘安装方向详细内容可参考该文章: https://docs.corewing.com/plane/inav/settings/gps/inav-compass-setup.html
参数设置:


4.3.4 图传设备安装与 OSD 设置
- 模拟图传安装:

- 模拟图传参数设置:


- 高清图传安装:

- 高清图传参数设置:


OSD 设置:
OSD 配置文件:INAV_OSD 文件.zip,可直接下载导入使用。
进入 CLI 页面。
点击 Load from File。
选择 OSD 文件。
等待 导入完毕。
点击 Save Setting。

4.3.5 空速计安装与设置
空速计安装位置参考:

重要
空速计安装、参数设置及如何校准详细内容可参考该文章: https://docs.corewing.com/plane/inav/settings/airspeed/setup.html
五、飞行前调试
5.1 电调校准
重要
确保电池已断开,桨叶已卸除!
①进入Output页面。
②勾选风险须知选项。

③马上将Master推至100%。

④给飞控使用电池供电。
⑤电调响起提示音→马上将Master推至0%→电调提示音结束。

BLHeli32/BLHeli_S 电调校准声:
接上电池等待 2 秒→“播放一首音乐”为油门最高点确认音→等待音乐播放完毕→将油门推到最低等待 1 秒→“播放另一首音乐,嘚-嘚-”为油门最低点确认音→校准完毕
**PWM 电调校准声 **:
接上电池等待 2 秒→“哔-哔-”油门最高点确认音→将油门推到最低等待 1 秒,N 声短鸣声表示锂电池节数→“哔-”油门最低点确认音→校准完毕。
⑤轻推油门,电机立马转动,将油门从 0%推至 20%,查看油门是否线性。
⑥若和上述效果有差异,断开电池,返回第②点重新进行校准。
重要
Dshot 协议开启详细内容可参考该文章: https://docs.corewing.com/plane/inav/settings/esc/esc-calib-dshot.html
5.2 电机转向检查及桨叶安装
根据电机转向选择正桨或是反桨
桨叶安装时注意有字的一面朝向机头
重要
若电机转向错误,请交换 任意电机 的三根电机线中 任意两根 ,即可调整转向。

5.3 罗盘校准
重要
校准前请先确认罗盘安装方向!
进入 Configuration 页面。
选择 Auto 可自动识别,确保罗盘已正确识别。
重要
若罗盘图标显示红色,则代表未正确识别,请检查接线或罗盘是否正常工作!

进入 Calibrate 页面。
点击 Calibrate Compass。
在 30 秒内,沿各轴旋转飞机 360°。

5.4 失控保护参数设置
进入 Failsafe 页面。
选择
RTH,保证飞机在失控时可通过飞控进行自主返航至头顶盘旋。点击 Save and Reboot。

点击 Advanced Tuning。
按照图示进行设置。
注意红框内的参数需要设置为
NEVER。

重要
设置完毕后注意点击 Save and Reboot 保存参数。
点击 Advanced Tuning。
可按照图示进行设置, 可根据实际情况进行调整巡航油门。
点击 Save and Reboot。
重要
建议在第一次返航时,进入 Advanced Tuning(高级调整)选项,允许手动增加油门来避免默认的返航速度过低,防止意外发生。

六、飞行测试
6.1 自检参数检查

重要
如何解决无法解锁的常见问题详细内容可参考该文章: https://docs.corewing.com/plane/inav/settings/fc/fcproblem/unlock-fail-common.html
6.2 起飞前检查
6.2.1 重心检查
1.参考机身标识:
- 固定翼机身上会标注推荐重心位置,通常在主翼前缘后 25-30% 处。

2.手指支撑法:
将飞机用 两根手指 放在主翼下方的推荐重心点上,轻轻平衡机身。
如果 机头过重 或 机尾过重,需要调整电池或配重。
机头偏重(重心过前):
飞机在飞行时不易拉升,可能导致起飞失败炸机。
可尝试 将电池后移 或 减少机头配重。
机尾偏重(重心过后):
飞机容易 抬头失速。
解决方法: 将电池前移 或 增加机头配重。
6.2.2 起飞前舵面检查
重要
飞行模式切换至 ANGLE
当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
当飞机抬头时,升降舵面朝下。
当飞机低头时,升降舵面朝上。
重要
飞行模式切换至 ACRO
当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
当向上打升降杆时,反馈为升降舵面朝下。
当向下打升降杆时,反馈为升降舵面朝上。
当向左打方向杆时,反馈为方向舵面朝左。
当向右打方向杆时,反馈为方向舵面朝右。
6.2.3 卫星数检查
重要
在室外,检查卫星数是否大于 8 颗,大于 8 颗才可以起飞!
若卫星数一直小于 8 颗,请到空旷场地,若无改善请更换 GPS 模块。

6.2.4 风向确认
观察风向:
可观察 烟雾、风标、旗帜 等风向标志。
使用 轻质物体(如草叶)抛向空中,观察飘动方向。
确定逆风起飞方向:
逆风起飞可提供更大的升力,降低起飞速度要求。
顺风起飞可能导致失速或被风压住机头,容易导致炸机。
6.3 起飞须知
根据飞机实际装机情况,选择 手抛起飞 或 滑行起飞,确保起飞顺利。
6.3.1 手抛起飞
1.模式准备:
选择
ACRO 模式,确保飞机舵量充足。推油门至 60-80%,确保起飞推力足够。
2.起飞姿势:
手握机翼下方,对于飞翼建议手握机翼,防止打手。
向上 30° 角度抛出,确保升力足够。
3.抛出技巧:
力度适中,避免过猛或太轻(不足以爬升)。
顺势送出,而非向下砸出。
重要
注意事项:
避免低油门抛飞,确保起飞动力充足。手抛后立即接管横滚杆,避免飞机滚转失控。
6.3.2 滑行起飞
选择
ACRO 模式。推油门至 60%-70%,保持适中加速度。
保持方向稳定,避免飞机滑行过程中偏航失控。
飞机速度足够后,缓慢拉起俯仰,使其顺利离地。
重要
注意事项:
确保起飞场地足够,避免短距离内急速抬升导致失速。
逆风滑跑,提高升力,避免侧风影响。
观察飞行状态,防止过度拉升或急速倾斜。
6.4 空中测试
1.舵面测试:
- 起飞成功后,将 飞行模式 切换至
ANGLE 模式,查看飞机是否自动修正姿态。
重要
若飞机姿态异常,切换至 ACRO 模式 降落, 检查 ANGLE 模式 下的 舵面。
2.平飞测试
- 将油门保持在 45%-55%,查看飞机是否 能够平飞, 没有俯冲或爬升 的迹象。
重要
若飞机 俯冲或爬升,则需要重新校准水平—使用 AUTOLEVEL 进行水平校准,令飞控与机翼平行。
如何使用 AUTOLEVEL 详细内容可参考该文章: https://docs.corewing.com/plane/inav/settings/fc/autolevel-autotune.html
AUTOLEVEL 需和主要模式叠加使用,可与 ANGLE 模式叠加使用,修改方法参考飞行模式设置中的 AUTOTUNE 设置。
3.自动调参:
- 将 飞行模式 切换至
AUTOTUNE 模式,进行自动调参。
重要
如何使用自动调参详细内容可参考该文章: https://docs.corewing.com/plane/inav/settings/fc/autolevel-autotune.html
4.飞行数据检查:
- 观察
OSD数据,确认 GPS、航向、高度、地速、电压电流 等数据正常。
重要
若发现数据不正常,请及时降落,检查设备!
5.返航功能测试:
- 将 飞行模式 切换至 RTH,测试飞机是否返航至起飞解锁点附近盘旋。
重要
若在返航模式下飞行姿态异常,请及时切换至 ACRO 或 ANGLE,检查返航参数设置!
6.着陆前检查:
确认电池余量,确保有足够电量完成着陆。
观察风向,选择逆风降落方向。
技术支持二维码
