高频头使用 mLRS 固件进行 MSP 通信 — iNav 固件
一、工作原理
CoreWing Sirius 高频头刷入 mLRS 固件后,将遥控功能和数传功能整合到一个设备中,实现了数遥一体,具有以下优势:
- 设备精简:只需配置一个模块,既可完成遥控信号上行,又可实现 MSP 透传双向通信,减少设备数量和连接复杂性
- 抗干扰能力强:遥控信号和 MSP 数据共用同一无线电链路,减少互相干扰
- USB 透传:通过 USB 数据线连接高频头至电脑,直接使用 iNav 配置器进行调参
二、设备准备
2.1 飞控
- CoreWing F405 WING V2
2.2 无线通信模块
- 高频头:天狼星 Sirius 2.4G (需刷入 mLRS 固件)
- 接收机:SkyGuy Nano 2G4 RX(需刷入 mLRS 固件)
2.3 遥控器
- 推荐:RadioMaster TX16S
- 兼容:其他支持外置模块的遥控器
三、遥控器设置和 Lua 脚本导入
3.1 遥控器外置射频参数设置
重要
mLRS 官方仅支持 400k 波特率!如果使用 ELRS 的 1.87M/3.75M/5.25M 波特率,将无法正常工作。
- 进入遥控器
MODEL SETUP - 关闭
Internal RF - 开启
External RF Mode设为CRSFBaudrate设为400k



3.2 导入 mLRS Lua 脚本
mLRS Lua 脚本下载:
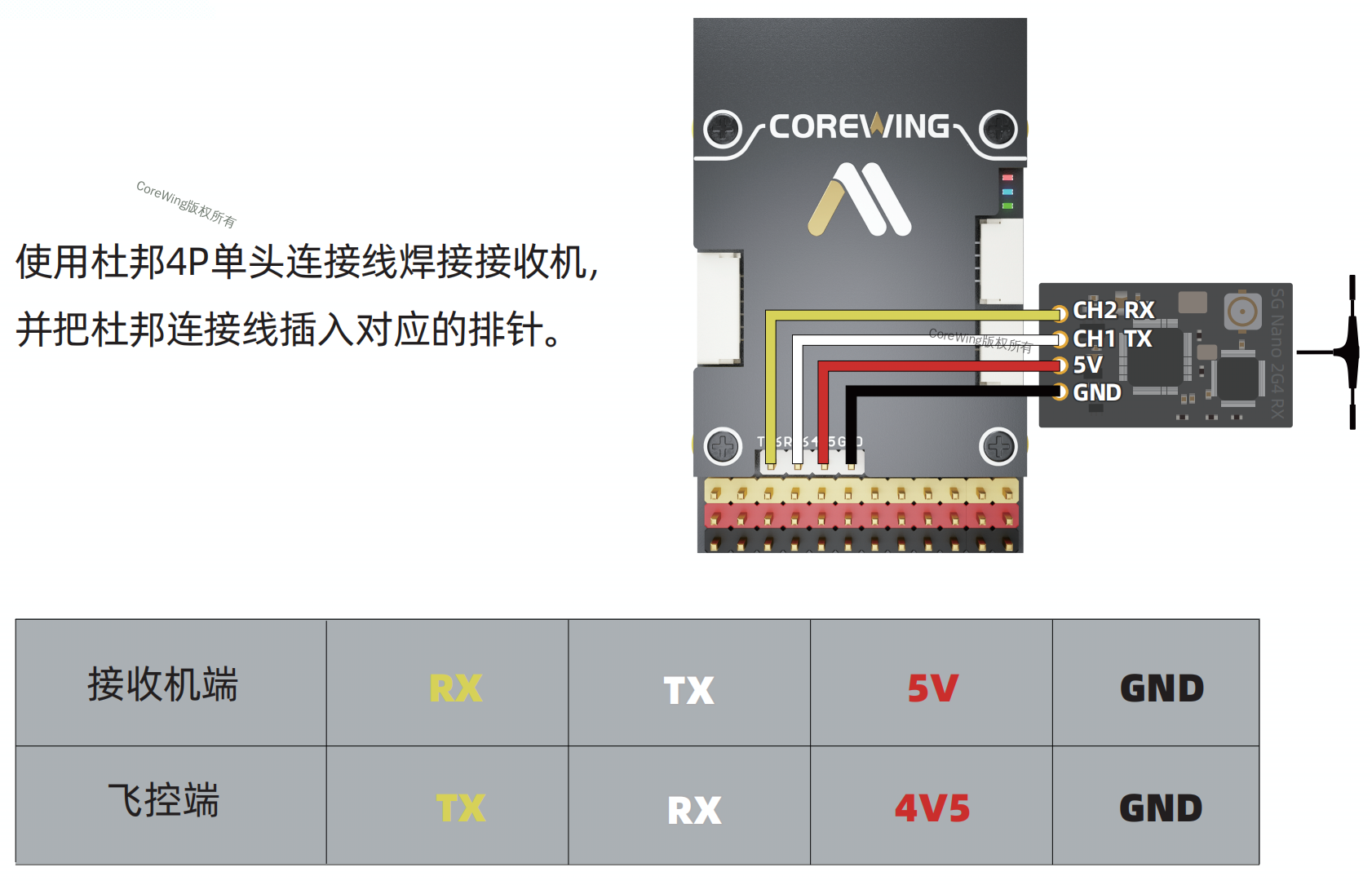
四、接收机连接飞控
重要
CoreWing F405 WING V2 飞控与接收机的连接方式:
- 接口要求:必须连接至串口 6
- 原因说明:
- 串口 6 内置 DMA 支持
- 支持 MSP 透传通信
五、高频头与接收机对频
六、mLRS 参数设置
6.1 高频头参数设置
进入 mLRS Lua 脚本,修改以下参数:
注意
一定要记得点 Save,才可以保存参数!!!
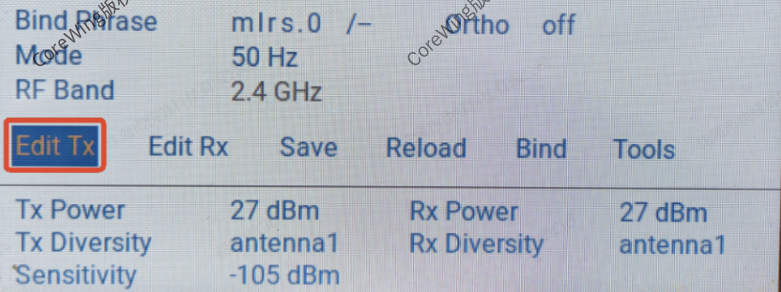
点击 Edit Tx,进入高频头参数编辑
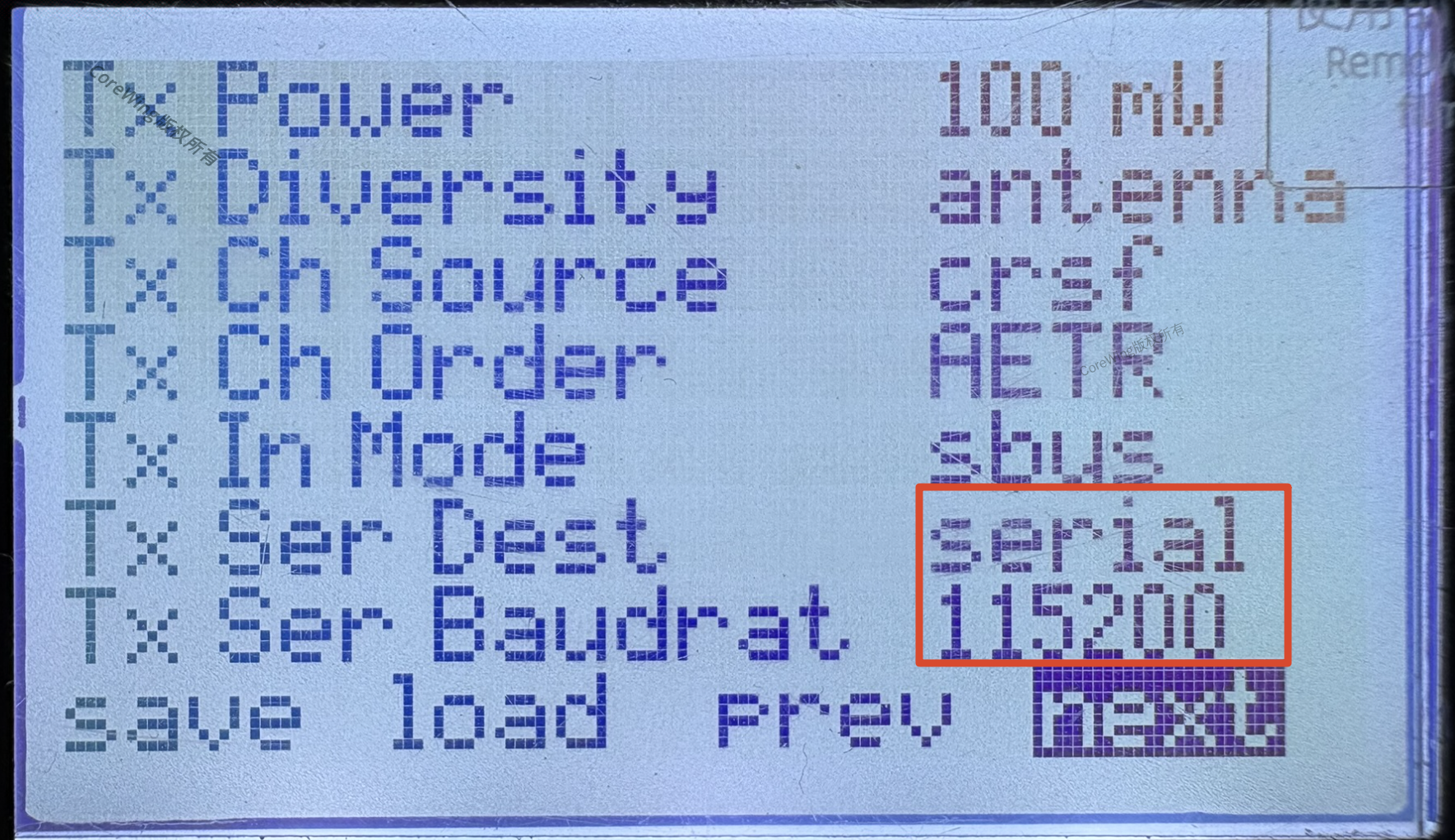
点击 next,找到 Tx 的相关参数
| 参数 | 设置为 |
|---|---|
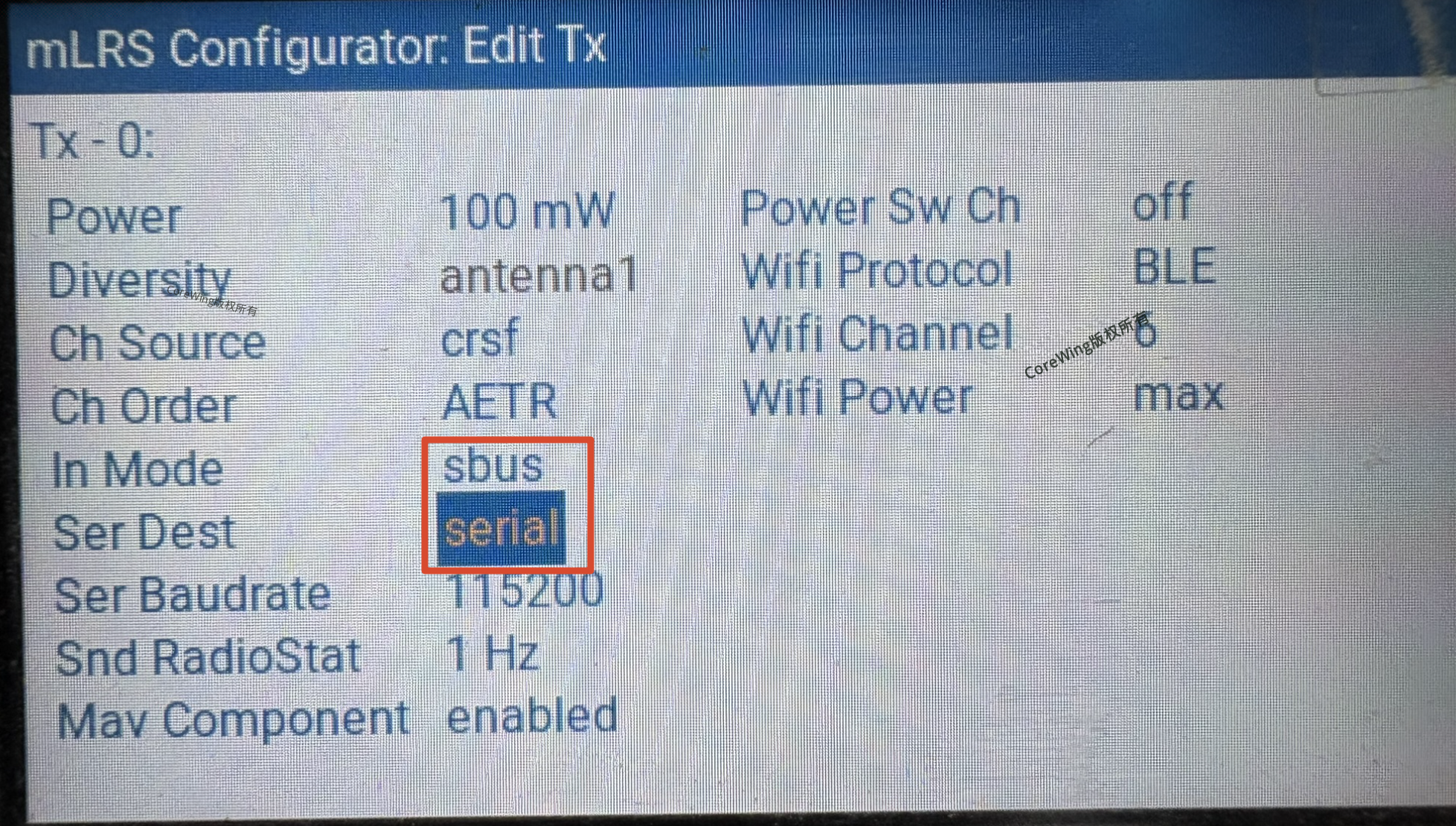
| Tx Ser Dest | serial |
| Tx Ser Baudrate | 115200 |
提示
Tx Ser Dest 设置说明:
serial:开启高频头 USB 输出,可使用 USB 数据线连接电脑serial2:开启 BLE 蓝牙功能,无法使用 USB 连接
本文需要使用 USB 数据线连接 iNav 配置器,因此设置为 serial。
6.2 接收机参数设置
进入 mLRS Lua 脚本,修改以下参数:
注意
一定要记得点 Save,才可以保存参数!!!
点击 Edit Rx,进入接收机参数编辑
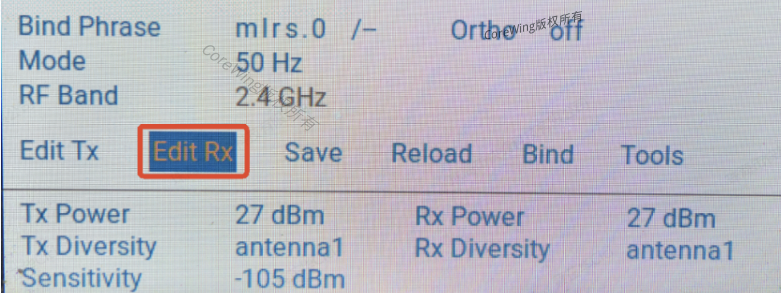
点击 next,找到 Rx 的相关参数
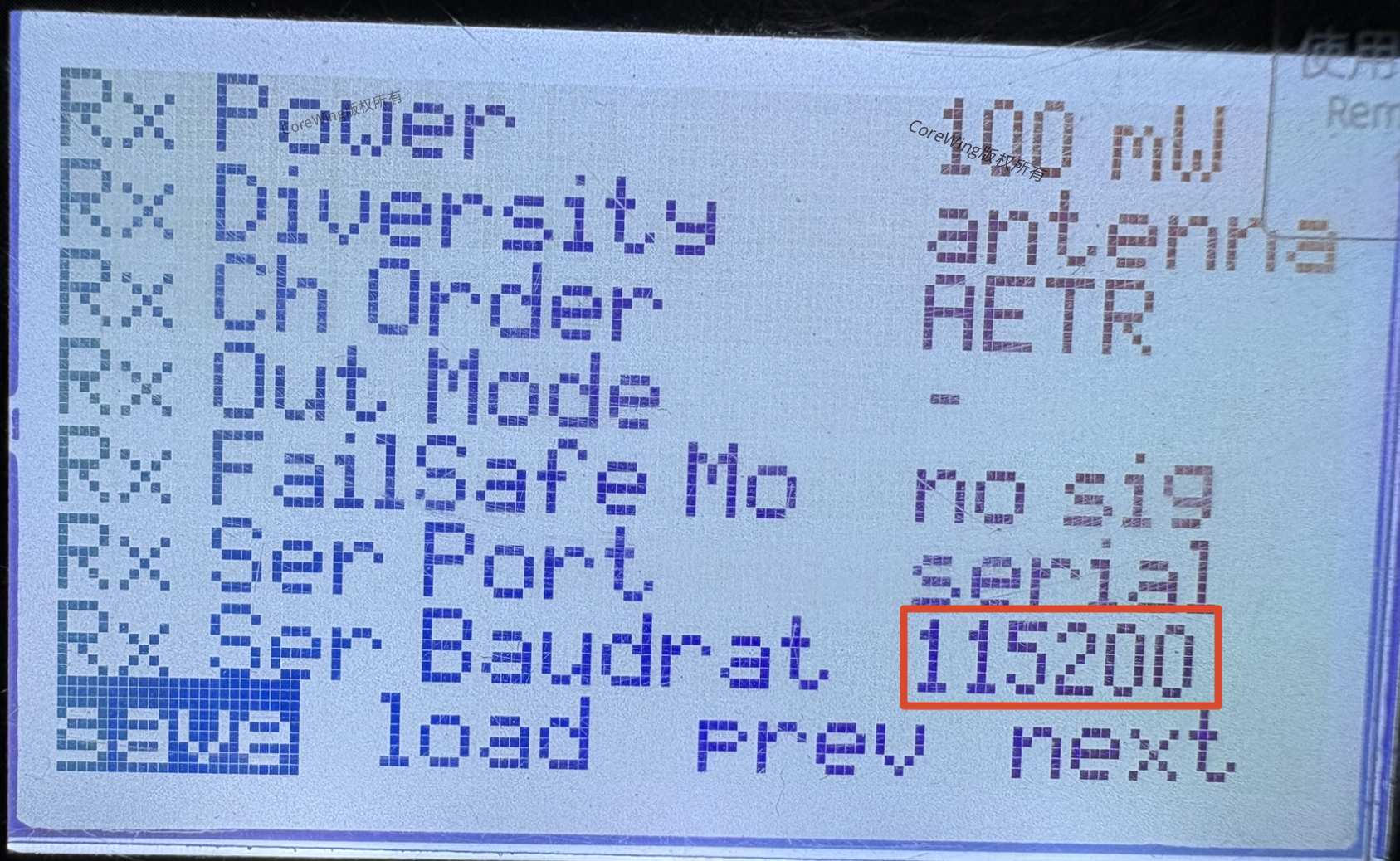
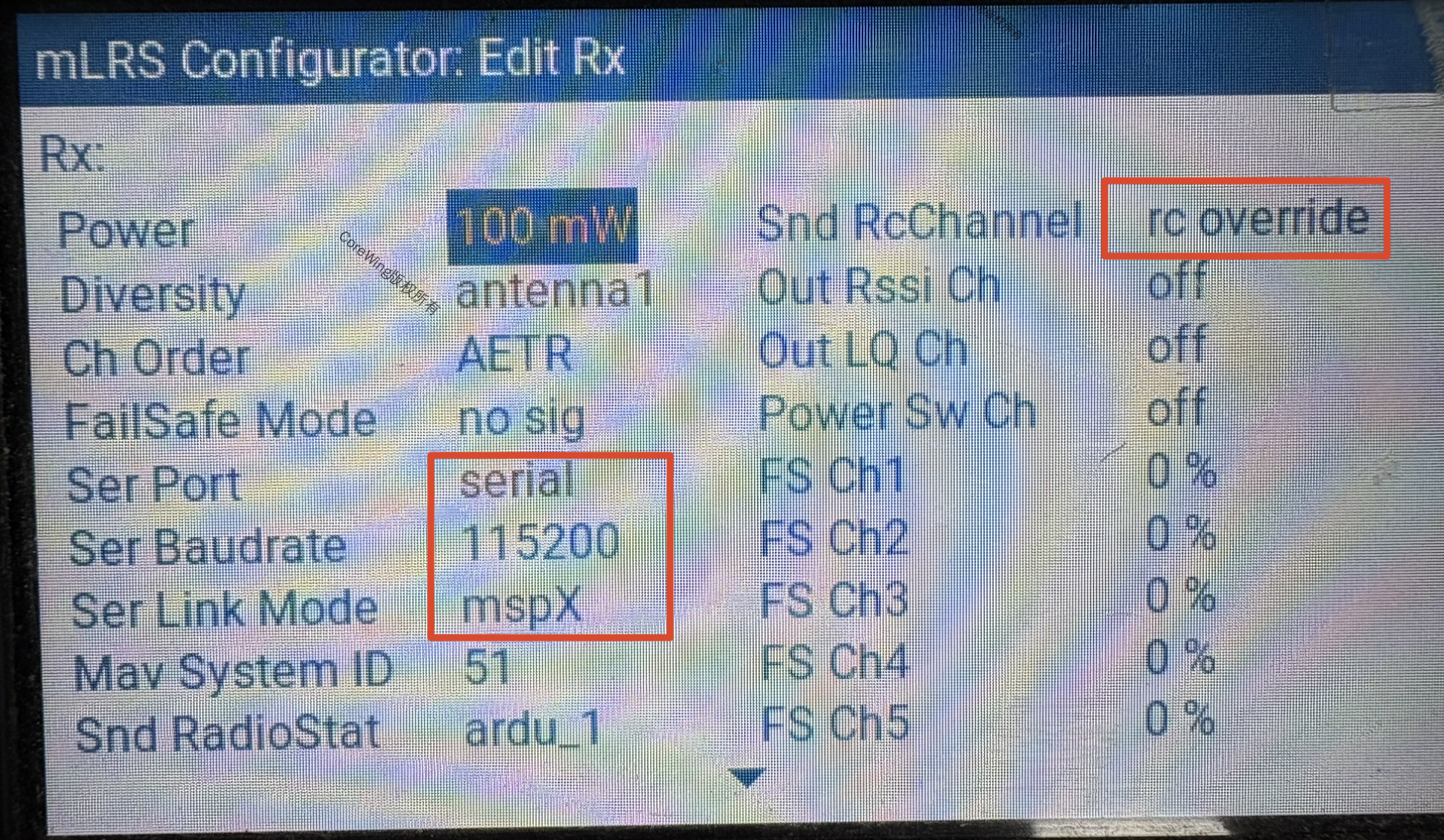
| 参数 | 设置为 |
|---|---|
| Rx Ser Baudrate | 115200 |
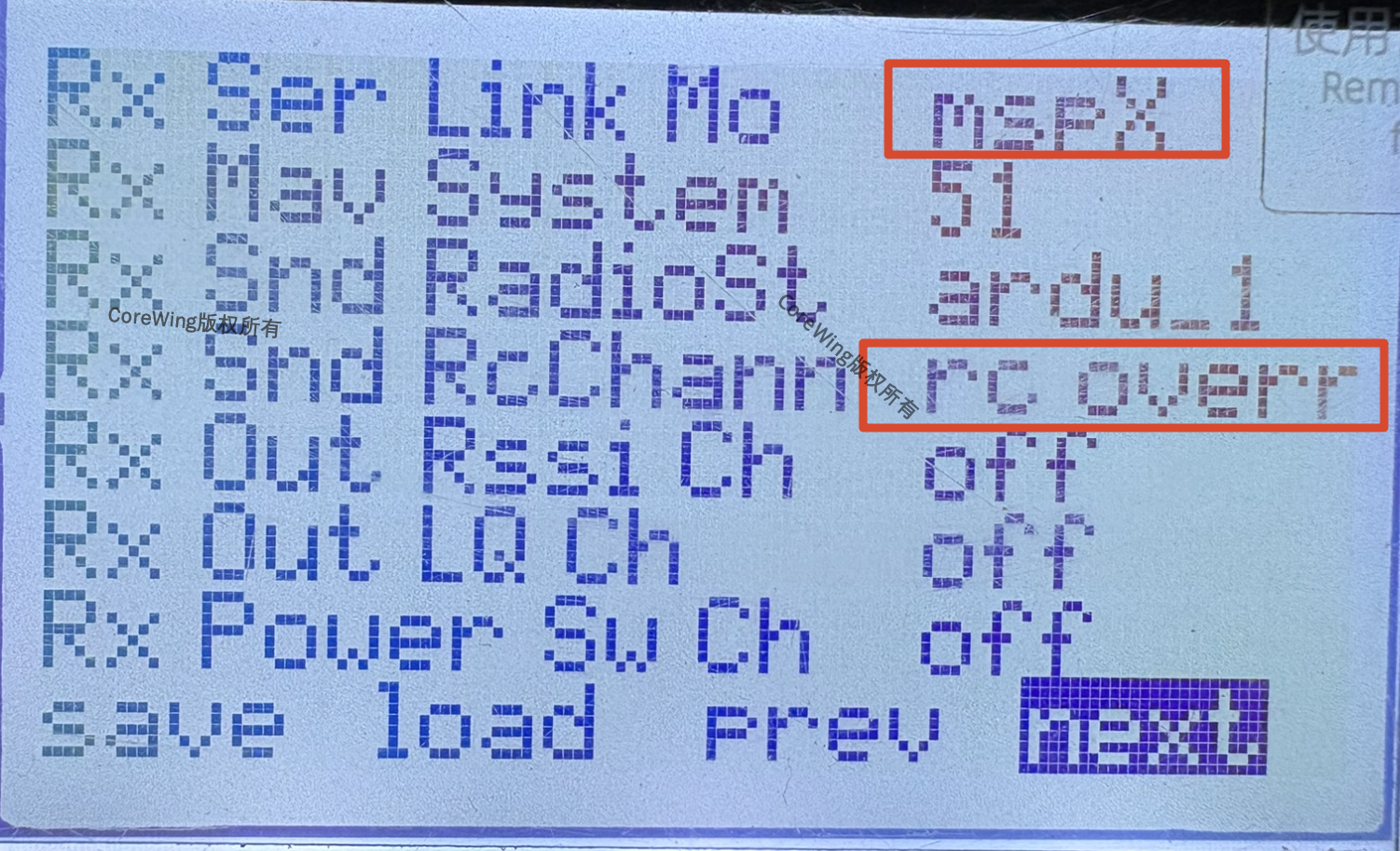
| Rx Ser Link Mode | mspX |
| Rx Snd RcChannel | rc_override |
提示
MSP 透传模式说明:
mspX:启用 MSP 透传功能,支持 iNav 配置器通过高频头与飞控通信- 波特率设置为 115200 以匹配 MSP 通信标准
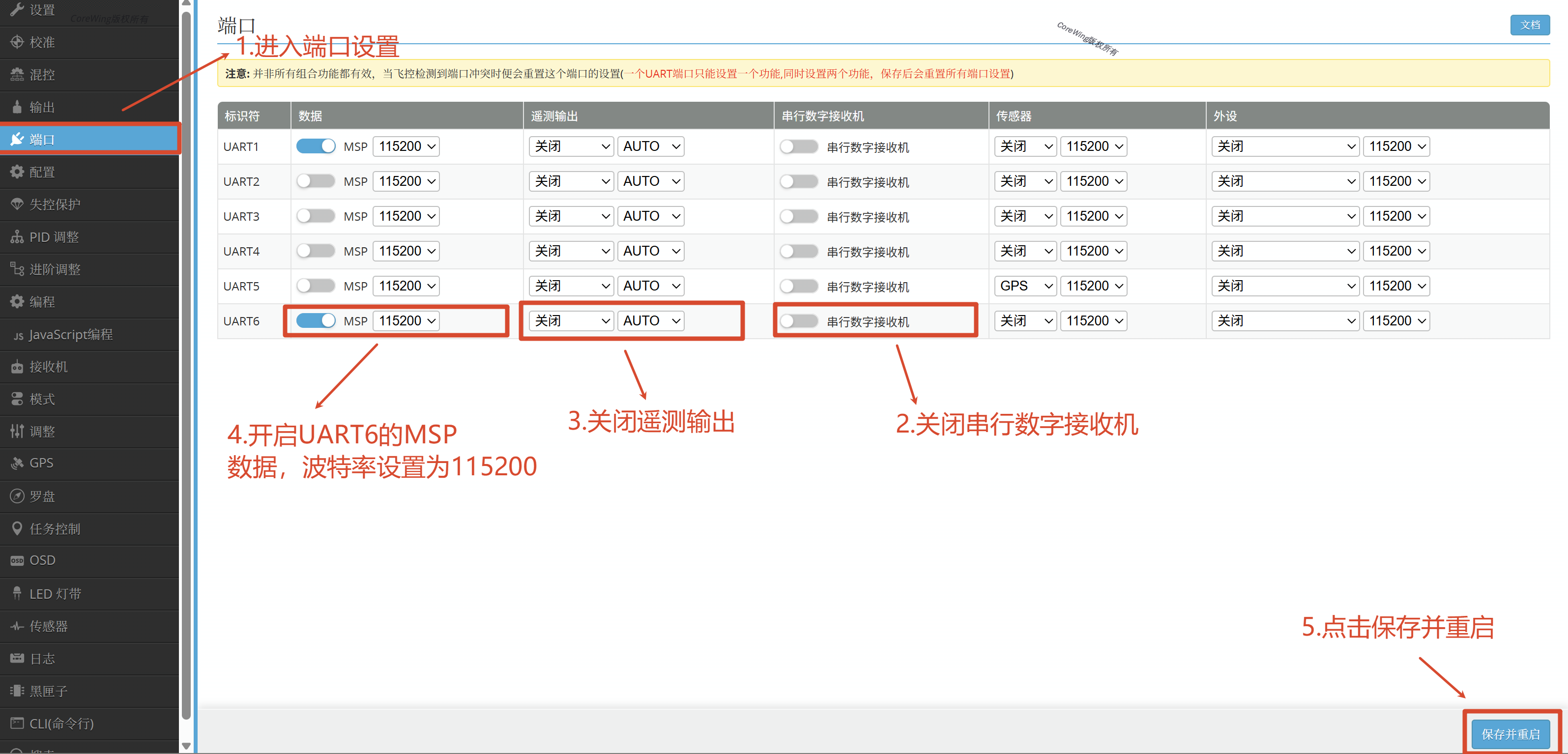
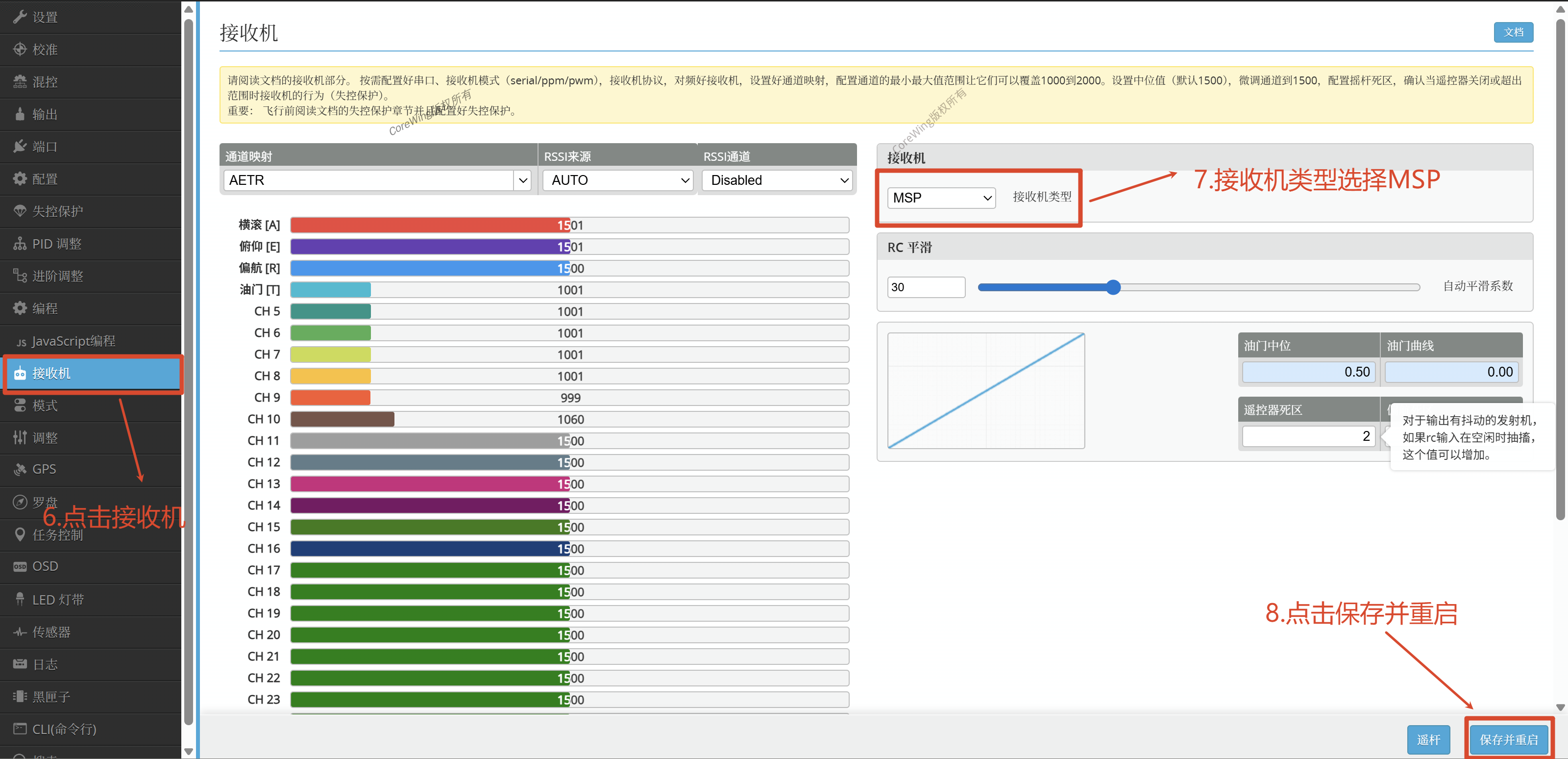
七、飞控参数设置
使用数据线将飞控连接到电脑
打开iNav地面站
修改以下参数设置
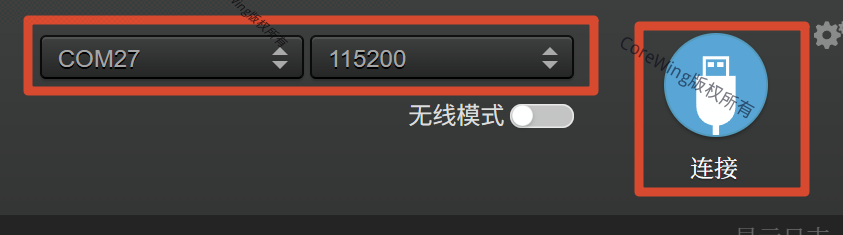
八、地面站连接设置
8.1 USB 数据线连接
使用 USB 数据线将高频头连接至电脑
打开 iNav 地面站
在端口选择下拉菜单中,找到高频头对应的串口(通常显示为
COMx或/dev/ttyUSBx)波特率选择 115200
点击 连接 按钮
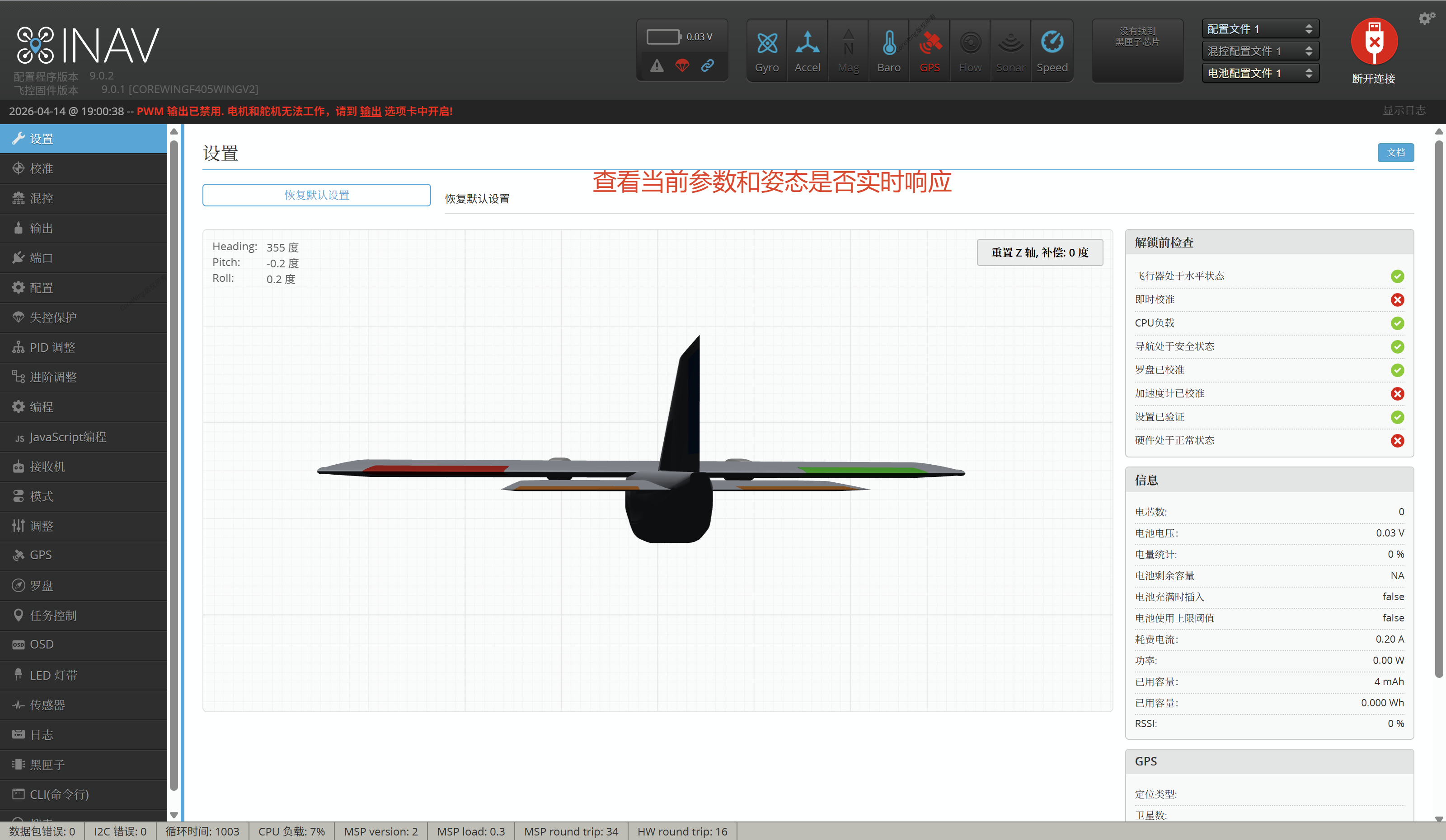
- 查看地面站是否有数据
九、Q&A
Q1: Tx Ser Dest 设置为 serial 和 serial2 有什么区别?
A1:
serial:开启高频头 USB 输出,可使用 USB 数据线连接电脑地面站,但无法使用 BLE 蓝牙serial2:开启 BLE 蓝牙功能,可通过蓝牙连接手机 APP,但无法使用 USB 数据线连接
Q2: 为什么 Rx Ser Baudrate 要设置为 115200?
A2: MSP 协议的标准通信波特率为 115200,与 ArduPilot 使用的 MAVLink(57600)不同。
Q3: 如何确认 MSP 透传功能正常工作?
A3: 连接 iNav 配置器后,如果能成功读取飞控参数并实时显示飞行数据,说明 MSP 透传功能正常。
技术支持二维码
如有任何疑问,扫码联系技术支持:
